Compactification de Thurston d`espaces de réseaux marqués et de l

Compactification de Thurston d’espaces de réseaux marqués et de l’espace de Torelli
Thomas Haettel
Université Paris-Sud, thomas[email protected]
1. Compactifications d’espaces de réseaux marqués
Fixons Kle corps R,Cou H. Notons Ol’anneau des entiers de K: ainsi O=Zsi
K=R,O=Z[i]si K=Cet O=Z[i, j, k]si K=H. Soit m>1un entier, munissons
l’espace vectoriel à droite Kmde sa structure hermitienne standard.
Un réseau marqué de Kmest un morphisme de O-modules à droite de Omdans Km,
dont l’image est un réseau de Kmde covolume 1. Notons Eml’espace des réseaux marqués
de Kmà isométrie de Kmprès. Cet espace est naturellement homéomorphe à l’espace
symétrique SLm(K)/SUm(K), et est muni de l’action à gauche de SLm(O).
De manière analogue à la compactification de Thurston de l’espace de Teichmüller,
nous allons plonger cet espace de réseaux marqués dans un espace de fonctions de
longueur. Notons P(ROm
+)l’ensemble des classes d’homothétie positive de ROm
+, muni de la
topologie quotient de la topologie produit. Cet espace est muni d’une action à gauche de
SLm(O)par précomposition par l’adjoint.
Théorème 1.1 L’application
φ:Em→P(ROm
+)
[f:Om→Km]7→ [u7→ ||f(u)||]
est un plongement d’adhérence compacte. On note Em
Tla compactification de Thurston
de Emainsi définie. L’action à gauche de SLm(O)sur Em
Ts’étend naturellement à SLm(K),
ce qui en fait une compactification SLm(K)-équivariante.
2. Compactifications de Satake d’espaces symétriques
Si Gest un groupe de Lie réel connexe semi-simple de centre fini sans facteur compact
(par exemple G= SLm(R)) et si Kest un sous-groupe compact maximal de G(par exemple
K= SO(m)), rappelons la compactification de Satake de l’espace symétrique X=G/K
associé à une représentation projective irréductible de noyau fini ρde Gdans un espace
vectoriel complexe de dimension finie V.
Par compacité de K, il existe un produit scalaire hermitien sur Vtel que ρ(K)⊂PU(V).
Si f∈End(V), notons f∗l’adjoint de frelativement à ce produit scalaire. Notons P(Sym(V))
l’espace projectif de l’espace vectoriel des applications linéaires hermitiennes de V, il est
muni d’une action à de Gpar g·[f] = [ρ(g)fρ(g)∗].
Théorème 2.1 (Satake) L’application
X=G/K →P(Sym(V))
gK 7→ [ρ(g)ρ(g)∗]
est un plongement d’adhérence compacte, ce qui définit la compactification de Satake
XSde Xassociée à la représentation ρ, c’est une compactification G-équivariante.
Considérons G= SLm(K)et K= SUm(K), et prenons pour ρla représentation linéaire
standard de Gsur Cm(ou sur C2msi K=H). Notons Em
Sla compactification de Satake
ainsi obtenue.
Théorème 2.2 Les deux compactifications Em
Tet Em
Ssont SLm(K)-isomorphes.
3. Compactifications d’espaces de réseaux autoduaux
Fixons τ= idRsi K=R,τ= idCou la conjugaison si K=C, et τla conjugaison si
K=H. Fixons bune forme τ-sesquilinéaire sur Km, non dégénérée et indéfinie. Si Λest
un O-réseau de Km, on définit son dual par rapport à bpar :
Λ∗b={y∈Km:∀x∈Λ, b(x, y)∈ O}.
On dit que le réseau Λest autodual (pour b) si Λ∗b= Λ.
Notons Eb
mle sous-espace de Emconstitué des réseaux autoduaux marqués, il est na-
turellement homéomorphe à l’espace symétrique G/K = SU(b)/(SU(b)∩SUm(K)). Ce point
de vue permet de décrire tous les espaces symétriques de type non compact classiques.
L’adhérence de Eb
mdans Em
Tdéfinit la G-compactification de Thurston Eb
m
Tde Eb
m. Con-
sidérons la G-compactification de Satake Eb
m
Sde Eb
massociée à la représentation ρde G
dans SLm(C).
Théorème 3.1 Les deux compactifications Eb
m
Tet Eb
m
Ssont G-isomorphes.
4. Compactification de l’espace de Torelli
Fixons une surface topologique Scompacte connexe orientée de genre g>2.
L’espace de Torelli Tor(S)de Sest l’ensemble des surfaces hyperboliques compactes X
de genre g, munies d’un isomorphisme f:H1(X, Z)→H1(S, Z)(provenant d’une isométrie
S→X), où l’on identifie (X, f)et (X0, f0)s’il existe une isométrie σ:X→X0telle que
f0=f◦σ∗:H1(X0,Z)→H1(S, Z). C’est aussi le quotient de l’espace de Teichmüller de S
par le groupe de Torelli, qui est le groupe des classes d’isotopie d’homéomorphismes de S
qui induisent l’identité sur H1(S, Z) = Z2g.
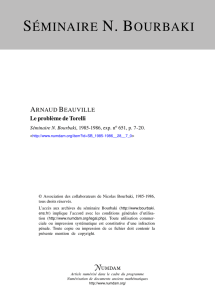
Figure 1: Une base de H1(S, Z)
D’après le théorème de Hodge, l’espace vectoriel des 1-formes différentielles har-
moniques sur Xest isomorphe à H1(X, R), donc à R2g: nous considérerons ainsi les
représentants harmoniques des classes de cohomologie. Le produit scalaire L2des formes
harmoniques définit une structure euclidienne sur H1(X, R), et la forme d’intersection sym-
plectique sur H1(X, R)est donnée par :
∀ω, ω0∈H1(X, R),Int(ω, ω0) = ZX
ω∧ω0.
Théorème 4.1 L’application
Tor(S)→P(RZ2g
+)
[X, f]7→ u∈Z2g7→ ||f−1(u)||
est propre, et définit ainsi une Sp(2g, Z)-compactification Tor(S)Tde Tor(S).
Notons Eb
2gl’espace des réseaux de R2gmarqués par H1(S, Z) = Z2g, de covolume 1,
symplectiques (i.e. autoduaux pour la forme symplectique standard bsur R2g), à isométrie
préservant la forme symplectique près : c’est l’espace symétrique Sp(2g, R)/SU(g), aussi
appelé demi-espace de Siegel.
Théorème 4.2 (Torelli) L’application période
Tor(S)→ Eb
2g
[X, f]7→ f−1:Z2g=H1(S, Z)→H1(X, R) = R2g
est un revêtement d’ordre deux sur son image, ramifié sur le lieu hyperelliptique de
Tor(S).
Notons Tor(S)Sla compactification définie par la compactification de Satake de Eb
2gas-
sociée à la représentation linéaire tautologique ρde Sp(2g, R)dans R2g.
Théorème 4.3 Les deux compactifications Tor(S)Tet Tor(S)Sde Tor(S)sont Sp(2g, Z)-
isomorphes.
Nous décrivons également l’adhérence de l’image de l’application
ψ: Tor(S)→R+
Z2g
[X, f]7→ u∈Z2g7→ ||f−1(u))||.
Une des motivations de l’étude de bordifications de l’espace de Torelli est une grande ques-
tion ouverte dans le sujet, de savoir si le groupe de Torelli est de présentation finie lorsque
g>3.
1
/
1
100%