r - Le Repaire des Sciences

Satellites et planètes
Comprendre : une petite histoire de la Mécanique (.doc)
1 – Les lois de Kepler
Depuis l’Antiquité jusqu’au XVIème siècle, les phénomènes observés dans le ciel sont expliqués en
plaçant la Terre au centre de l’Univers : c’est le système géocentrique, décrit par Ptolémée au IIème
siècle, validé par Aristote puis par l’autorité religieuse. La mécanique céleste se différencie alors de la
mécanique terrestre : les astres « errent » dans les cieux et « chutent » sur Terre.
A partir du XVIème siècle, les physiciens Copernic, Galilée et Kepler introduisent la théorie de
l’héliocentrisme qui permet de donner une explication simple du mouvement apparent des planètes
(venant du grec planêtês signifiant « errant »), observé depuis la Terre. C’est Newton qui montrera que
mécanique céleste et mécanique terrestre sont régies par les mêmes interactions : ce qui se passe ici bas
n’est pas si différent de ce qui anime les cieux…
1.1 – Enoncé des lois de Kepler
Entre 1609 et 1618, Kepler publie dans Astronomia Nova trois lois révolutionnaires permettant de
décrire le mouvement des planètes autour du Soleil.
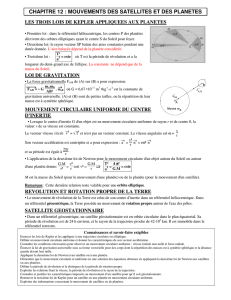
1.1.1 – Première loi ou loi des orbites
Dans le référentiel héliocentrique, la trajectoire du centre d’une planète est une ellipse dont l’un des
foyers est le centre du Soleil.
1.1.2 – Deuxième loi ou loi des aires
Le segment de droite [SP] (ou rayon-vecteur) qui relie le centre du Soleil au centre le la planète balaie
des aires égales pendant des durées égales.
Cette loi traduit l’observation de vitesses plus grandes lorsque la planète approche du Soleil (périhélies).
1.1.3 – Troisième loi ou loi des périodes
Nous notons ici T la période de révolution d’un planète (durée nécessaire pour qu’elle accomplisse un
tour complet de son orbite) et L la longueur du demi-grand axe de son orbite.
Terminale S – Physique
Chapitre 11

2
Le carré de la période de révolution T d’une planète autour du Soleil est proportionnel au cube de la
longueur L du demi-grand axe de son orbite,
2
3
T
k
L
k est une constante indépendant de la masse de la planète. Sa valeur est exprimée en s2.m–3 dans le
système international des unités.
Calculons k pour la Terre puis pour Jupiter et comparons les résultats :
aTerre = 150.106 km et TTerre = 365 jours
On obtient kTerre = 4,0.10-20 [jours2.km-3].
aJupiter = 780.106 km et TJupiter = 4 332 jours
On obtient kJupiter = 4,0.10-20 [jours2.km-2].
On trouve bien kTerre = kJupiter.
Pour les planètes du système solaire :
planète
a
demi grand axe
en 103 km
ou 106 m
T
période de
révolution
en jour
T
période de
révolution
en 106 s
T2/a3
en jour2.km-3 T2/a3
en s2.m-3
Mercure 57910 87,97 7,57984708 3,98482.10-11 2,95842.10-19
Vénus 108200 224,7 19,3610508 3,98588.10-11 2,95921.10-19
Terre 149600 365,26 31,47226264 3,98483.10-11 2,95843.10-19
Mars 227940 686,98 59,19294472 3,98498.10-11 2,95855.10-19
Jupiter 778330 4332,71 373,3236244 3,98133.10-11 2,95583.10-19
Pour les satellites de Jupiter observés par Galilée :
satellite
a
demi grand axe
en 103 km
ou 106 m
T
période de
révolution
en jour
T
période de
révolution
en 106 s
T2/a3
en jour2.km-3 T2/a3
en s2.m-3
Io 422 1,77 0,15251028 4,16878.10-8 3,095.10-16
Europe 671 3,55 0,3058822 4,17147.10-8 3,097.10-16
Ganymède 1070 7,15 0,6160726 4,17312.10-8 3,09822.10-16
Callisto 1883 16,69 1,43807716 4,17217.10-8 3,09751.10-16
On observe bien que T2/a3 est une constante mais que cette constante dépend de l’astre attracteur.
On a T2/a3 = 4p ²/GM, où G est la constante de gravitation universelle : G = 6,67.10-11 m3.kg-1.s-2
En prenant en compte les résultas des tableaux ci-dessus, il est donc possible de déterminer la masse des astres. On trouve par
exemple :
pour le Soleil :MS = 2,00.1030 kg
pour Jupiter :MJ = 1,91.1027 kg
Les lois de Kepler s’appliquent aussi bien aux satellites naturels qu’aux satellites artificiels d’un astre.

3
Pour quelques satellites de la Terre :
satellite
a
demi grand axe
en 103 km
ou 106 m
T
période de
révolution
T
période de
révolution
en s
T2/a3
en s2.m-3
Lune 384 27,32 jours 2,35.1069,78632.10-14
Hipparcos 24,546 10h37min 57s 38277 9,9068.10-14
NOAA 15 7,19 1h41min09s 6069 9,90941.10-14
GPS BII-01 26,5625 11h58min08s 43088 9,90617.10-14
Globalstar
MO48 7,79 1h54min4s 6844 9,90849.10-14
En utilisant la constante trouvée pour les satellites artificiels (quatre dernières lignes du tableau) on obtient comme masse de
la terre MT = 5,97.1024 kg
La constante obtenue avec la Lune est légèrement différente. Newton a déjà corrigé la troisième loi de Kepler en montrant
que la masse qui intervenait était en fait la somme des masses des deux corps en interaction gravitationnelle (ici la Terre et la
Lune).
En se servant de la correction de Newton on trouve MTerre + Lune = 6,05.1024 kg et par différence la masse de la Lune est ML =
7,36.1022 kg.
En fait, la troisième loi n’est qu' approchée et les bons résultats obtenus par Kepler sont dus au fait que la masse des planètes
est négligeable devant celle du Soleil (Jupiter, la plus grosse planète a une masse qui ne dépasse pas le millième de celle du
Soleil).
NB : Bien que Kepler ait découvert ces lois empiriquement, on sait aujourd’hui les démontrer.
1.2 – Les lois de Kepler dans le cas d’une orbite circulaire
A l’exception de Mercure et des planètes sub-neptuniennes, les trajectoires des autres planètes peuvent
être considérées comme circulaires.
Les lois de Kepler s’appliquent à ce cas particulier pour lequel les foyers de l’ellipse sont confondus.
La loi des orbites indique que la trajectoire est un cercle dont le centre est le centre du Soleil.
La loi des aires conduit alors à une vitesse de valeur constante : dans ce cas, la planète est en
mouvement circulaire uniforme.
La loi des périodes devient
2
3
T
Cste
r
où r est le rayon de la trajectoire.
2 – Obtention d’un mouvement circulaire uniforme
Lors de l’étude du mouvement des planètes et des satellites, nous nous limiterons au seul cas d’une
trajectoire circulaire. Comme nous venons de le voir, la loi des aires implique que le mouvement est
alors uniforme. Etudions les propriétés de ce mouvement.
2.1 – Propriétés d’un mouvement circulaire uniforme
Observer : les 8 premiers points de Rot1.avi avec Avistep

4
Nous constatons les propriétés suivantes,
le vecteur accélération est toujours dirigé vers le centre attracteur : il est dit centripète
le vecteur vitesse et le vecteur accélération sont constamment perpendiculaires
Pour ce mouvement, l’accélération est constante et vaut (tableau de valeurs sous Avistep) environ 8,5
m.s–2. Par ailleurs, la vitesse est constante et voisine de 0,95 m.s–1 ; le rayon-vecteur étudié est de 11 cm.
Nous pouvons vérifier que
2
2
2
0,95 8, 2 .
0,11
v
m s a
r
Lors d’un mouvement circulaire uniforme, le vecteur
accélération est donné par
2
N
v
a u
r
où
N
u
est un vecteur unitaire porté par la normale au cercle
et dirigé vers le centre du cercle.
Tracé du vecteur accélération instantanée
Tracé du vecteur vitesse instantanée
Ev
olution de l’accélération en fonction du temps
Evolution de la vitesse en fonction du temps

5
2.2 – Conditions nécessaires d’obtention d’un mouvement circulaire uniforme
Dans un référentiel galiléen, l’application de la deuxième loi de Newton appliquée au centre d’inertie G
d’un solide de masse m donne
ext G
F m a
Pour obtenir un mouvement circulaire uniforme,
G
a
doit être centripète et de valeur
2
v
r
, donc le vecteur
ext
F
, noté
F
, doit être lui aussi centripète et de valeur
2
m v
r
.
Le mouvement du centre d’inertie d’un solide de masse
m est circulaire uniforme dans un référentiel galiléen si
La somme
F
des forces qui lui sont
appliquées est un vecteur centripète
La valeur du vecteur
F
est constante et vérifie
la relation
2
m v
F
r
où r est le rayon du cercle trajectoire.
Remarque : à l’aide d’un logiciel de simulation (satel.exe), on peut vérifier que si la valeur de la vitesse
initiale ne vérifie pas la relation précédente, la trajectoire peut être elliptique. Dans ce cas, le vecteur
accélération est toujours dirigé vers l’un des foyers de l’ellipse, mais n’est pas constamment
perpendiculaire au vecteur vitesse.
Démonstration en coordonnées polaires (hors programme)
Dans le plan de la rotation, on définit les coordonnées polaires (r,θ) qui sont plus adaptées à l’étude du
mouvement de rotation.
θ
rM
r
u
u
x
z
O
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%