Robot Sarcleur Autonome: Conception, Détection Mauvaises Herbes 3D
Telechargé par
Patrick Duhaime

Dû à son ampleur, le projet a été séparé en plusieurs phases de développement. Nous
allons décrire, dans cette section, les phases de développement et leurs résultats.
Phase 1 : conception d’un robot autonome capable de se déplacer de façon autonome
dans des parcelles de bleuets sauvages en suivant à priori des trajets (missions)
préalablement conçus avec des outils de planification de mission, de façon à pouvoir visiter
chacune des zones infestées par des mauvaises herbes comme le Kalmia à feuilles étroites.
Ce robot doit donc pouvoir suivre ces trajets en utilisant des outils de géolocalisation
embarquée [27, 28]. (2) l’ajout d’un système de caméras multispectrales positionné de
manière à permettre au robot sarcleur autonome de détecter avec une meilleure précision
les mauvaises herbes présentes dans son champ de vision [6-17]. En plus de la détection
automatique des mauvaises herbes, ce système de caméras multispectrales permet aussi
de déduire la localisation 3D des mauvaises herbes à éradiquer [21].
3.1 Étape 1 : Conception du robot autonome : Aspect matériel
Composantes actionneures : Les moteurs (DC motors)
Composante commande : Cette composante constitue le cerveau du robot qui de façon
générale permet d’analyser les données provenant des capteurs et d’envoyer les commandes
aux moteurs (DC motors).
3.2 Étape 2 : Conception du robot autonome : Aspect logiciel
Composante de commande: Le logiciel embarqué du robot autonome développé est
responsable de gérer en temps réel la commande des moteurs DC actionnant les deux roues
avant du robot autonome.
Composantes de positionnement: Le logiciel embarqué est assisté dans l’asservissement des
moteurs DC responsables des déplacements du robot autonome par une autre composante
logicielle qui elle permet de contrôler aussi en temps réel la position GPS du robot [28].
3.3 Étape 3 : Conception du robot autonome : Validation du fonctionnement matériel
Lors de cette étape du projet, le fonctionnement des différentes composantes matérielles a été
testé pour en faire la validation, et le cas échéant des modifications matérielles ont été
apportées au robot sarcleur autonome. Le fonctionnement matériel du prototype de robot
mobile autonome assemblé a d’abord été testé sur les terrains de l’entreprise partenaire. Dans
cette phase de validation, des déplacements simples du robot contrôlés à distance, ont été
effectués afin de pouvoir tester les composantes motrices du robot.
3.4 Étape 4 : Conception du robot autonome : Validation du fonctionnement logiciel
Cette étape a permis de tester le fonctionnement des composantes logicielles embarquées du
robot autonome. Le fonctionnement logiciel du prototype de robot mobile autonome

assemblé a d’abord été testé sur les terrains de l’entreprise partenaire. Dans cette première
phase de validation, des déplacements autonomes simples du robot, ont été effectués afin de
pouvoir tester la précision des déplacements autonomes du robot vers des points GPS
sélectionnés au préalable sur les terrains de l’entreprise partenaire. Une seconde phase de
validation a permis de tester la précision des déplacements autonomes du robot vers des
zones infestées par des mauvaises herbes dont les coordonnées GPS ont été déduites
d’images multispectrales géoréférencées segmentées, capturées à l’aide d’un drone lors de
missions effectuées au préalable lors des saisons de végétation 2019 et 2020 sur les mêmes
parcelles de bleuet sauvage utilisées dans le contexte d’une recherche subventionnée par le
MAPAQ. Les composantes logicielles ont aussi été adaptées pour permettre l’atteinte du
fonctionnement optimal du robot sarcleur autonome.
3.5 Étape 5 : Conception du robot autonome : Détection et localisation 3D des
mauvaises herbes (Ajout d’un système de caméras multispectrales)
Cette première version du système de sarclage (système robotisé de type SCARA) développé
du robot mobile autonome est basé sur un système de vision artificielle permettant la
détection automatique de mauvaises herbes comme le Kalmia à feuilles étroites à éradiquer
dans l’espace sous le robot autonome. Cette phase a permis l’installation de caméras
multispectrales à l’avant du robot sarcleur autonome.
3.6 Étape 6 : Conception du robot autonome : Détection et localisation 3D des mauvaises
herbes (Validation de la détection des mauvaises herbes)
Cette étape a permis de tester le fonctionnement des composantes logicielles embarquées du
robot sarcleur autonome dédiées à la capture des images multispectrales, la génération des
images d’indices de végétation et le processus de classification permettant d’extraire les
régions comportant de la végétation comme des mauvaises herbes. Ces composantes
logicielles sont aussi adaptées, le cas échéant pour optimiser la détection des mauvaises
herbes.
3.7 Étape 7 : Conception du système robotisé de type SCARA : Aspect matériel
Cette étape consiste à concevoir un système robotisé de type SCARA [23], pour l’éradication
des mauvaises herbes détectées dans le champ de vision du robot.
Pour la conception du système robotisé de type SCARA, nous nous sommes basés sur le
travail du site HowToMechatronics [1], qui est un site Web éducatif dans le domaine du génie
mécanique, électrique et informatique.

SCARA Robot | How To Build Your
Own Arduino Based Robot
Cet exemple de robot SCARA réalisé par
HowToMecatronics nous a servi de base de
départ. Ce robot nous a beaucoup aidé dans la
compréhension et la conception de cette phase
de notre projet.
Le projet : “SCARA Robot | How To Build Your Own Arduino Based Robot” propose la
conception d’un robot de type SCARA de table aux fins d’expérimentations. Les dimensions
de ce robot ne convenant pas à notre application, nous avons dû le modifier. Outre les
dimensions, son orientation nous pose un problème, en effet, le robot est maintenu par un
socle à la base du robot tandis que nous avons besoin d’un robot maintenu par le haut afin de
le fixer sur le robot qui effectue les déplacements.
Puisque ce robot est un projet expérimental, il a été développé avec des moteurs NEMA17,
ces moteurs ne sont pas très performants au niveau de la force motrice et ne sont pas assez
précis pour notre application. Ces moteurs utilisent les signaux PWM (Pulse with
modulation) et ne sont pas munis d’encodeur, les encodeurs permettent de prendre en compte
les modulations manqués par le moteur et s’assurent que le déplacement a bien eu lieu suite à
une modulation, sans encodeur, le contrôleur ne sait pas si le mouvement a vraiment eu lieu,
il n’y a donc pas de vérification ce qui peut provoquer des erreurs de positionnements ce que
nous voulons éviter.
Nous avons donc opté pour des moteurs NEMA23 Close-loop munis d’encodeur. Ce choix et
les contraintes cités plus haut nous ont amené à revoir fortement les plans du robot original.

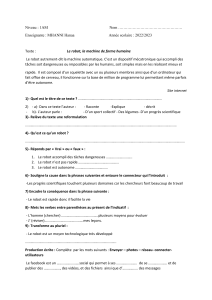
Fig. 1 - Plan éclaté des composantes mécaniques.
Le robot original fonctionnant avec un Arduino UNO et un bouclier CNC (CNC SHIELD)
qui comprend quatre (4) contrôleurs A4988, suite à nos changements, cette configuration
pose un problème, car ces contrôleurs ne conviennent pas pour les moteurs NEMA23
Closed-loop. Ces moteurs nécessitent des contrôleurs CL57T qui sont beaucoup plus
volumineux et nécessite une alimentation dédiée et par le fait même, une installation
totalement différente.
Nous avons remplacé l'Arduino UNO par l'Arduino NANO qui prend moins d’espace
physique tout en procurant des performances supérieures. L’Arduino Nano est une carte plus
petite (45mm*18mm), plus légère (5g), moins chère et pourtant elle est tout aussi puissante
qu’une UNO avec ses 14 pins digitaux sur lesquelles elle fournit 40mA maximum (par pins
digitaux), 8 pins analogiques (2 de plus que la UNO) ainsi que 32Kb de mémoire Flash et
2Kb de mémoire dynamique. Cette carte se veut vraiment minimaliste, en plus de son
empattement réduit, contrairement à la Uno, elle ne dispose pas du connecteur DC de 2.5mm,
elle est alimentée directement par le port USB. Cette carte reçoit les positions des zones à
traiter par le biais de son port série (USB) et utilise la librairie GRBL[2] pour contrôler les
moteurs NEMA23.

Suite à tous ces changements, nous sommes arrivés à un résultat assez satisfaisant qui permet
de couvrir toutes les positions sur une surface de 1.0 m de largeur. Le robot pivotant sur son
axe central est muni d’un premier bras (L1) qui fait : 312.75 mm de longueur sur lequel est
fixé un deuxième bras d’une longueur de : 187.25 mm pour nous donner une amplitude
maximale de 50.0 mm pivotant sur un axe de 180 degrés ce qui nous donne 1.0 m de zone de
traitement.
L’axe Z a une amplitude de 750 mm à partir du sol afin de satisfaire aux contraintes de départ
du projet qui étaient de pouvoir traiter des plantations jusqu’à 24 pouces (609,6 mm) de
hauteur.
Notre version du robot SCARA prend en
compte les problèmes du prototype original
de HowToMecatronics.
Puisque nous avons modifié fortement les
dimensions, surtout la dimension de l’axe Z,
nous avons tenu principalement à minimiser
les problèmes de tangages en fixant la base
dans le haut d’une boite métallique et en
ajoutant huit (8) roulements à billes dans
une anneau monté en étau dans le bas de la
boite métallique. Notre version dispose
donc de deux (2) points d’ancrages, ce qui
stabilise grandement la structure de l’axe Z.
 6
7
8
9
6
7
8
9
1
/
9
100%