Hyperstatisme - cours V3.5.doc – JM Périnet 1/4
Hyperstatisme des mécanismes
1. Définition, notion d’ordre d’hyperstaticité (approche simplifiée)
On parle d’hyperstatisme dans un modèle de mécanisme quand au moins un degré de liberté
est supprimé plusieurs fois.
Exemple :
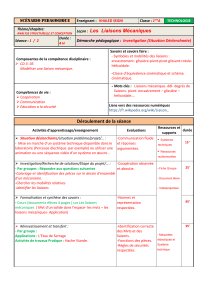
Comme il n’y a qu’une seule mobilité qui est supprimée plusieurs fois, la liaison est dite hyperstatique
d’ordre 1. Cela signifie qu’il faudrait donner au système 1 degré de liberté supplémentaire (= ddl) pour
qu’il ne soit plus hyperstatique. Dans le cas précédent, pour que la liaison entre les 2 pièces ne soit plus
hyperstatique, il faudrait donc remplacer la linéaire rectiligne (4 ddl), par une liaison à 4+1 (R) = 5 ddl,
soit une ponctuelle de normale .
2. Conséquences de l’hyperstatisme
Inconvénients, du fait de l'imperfection des pièces usinées :
mauvaise mise en position (ex. 1), voire impossibilité
de montage (ex. 2),
coincement (ex. 2), parfois dû aussi à de la dilatation
thermique différentielle (matériaux avec des
coefficients de dilatation thermique différents et/ou
échauffement différents des pièces),
déformation et usure si on force (ex. 2).
Avantages : système plus rigide, permettant de faire passer
des efforts plus importants dans les liaisons et avec
des liaisons plus « simples » à réaliser que dans un système
isostatique.
3. Calcul de l’ordre d’hyperstaticité
Pour une liaison entre 2 pièces, le calcul est assez simple (voir exemple précédent). Par contre, pour
un mécanisme complet, cela devient plus compliqué. D’après la « théorie des mécanismes », l’ordre
d’hyperstaticité est donné par la formule suivante :
Remarques :
Le nombre de mobilités utiles correspond au nombre de mobilités utiles aux entrées du mécanisme.
Quand ces mobilités sont bloquées, les mobilités utiles de sorties sont également bloquées.
Si on bloque les mobilités utiles, les mobilités internes correspondent aux éventuelles mobilités
restantes de groupes cinématiques du mécanisme.
: mobilités supprimées par la pivot-glissant
: mobilités supprimées par la linéaire rectiligne
R est supprimée 2 fois, la liaison pivot est donc
hyperstatique.
En tournant, l'arbre
translate aussi...
Ex. 1
Ex. 2
Glissière réalisée
avec 2 pivots
glissants
normalement
parallèles
T
T
T
R
R
R
Tableau des mobilités entre les 2 pièces
liaison pivot
Mobilités utiles (nombre de mouvements
« globaux » du mécanisme en partant
de l'entrée) + Mobilités internes (nombre
de mobilités de pièces bougeant sans aucun
lien avec l'entrée ou la sortie)
Nombre de liaisons
Nombre de pièces (avec le bâti)
Nombre total de ddl
de toutes les liaisons
h = m + 6 x ( l – n + 1 ) – Nc ≥ 0 (erreur si négatif !)

Hyperstatisme - cours V3.5.doc – JM Périnet 2/4
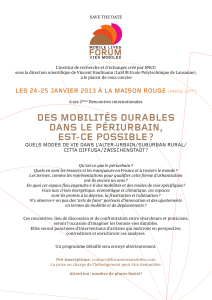
piston
bielle
vilebrequin
2 ddl
2 ddl
1 ddl
1 ddl
bâti
Pour les liaisons de type engrenage, dans le cadre d’une étude d’hyperstatisme, il faut les remplacer
par des liaisons élémentaires :
linéaire annulaire si l’épaisseur de l’engrenage est « mince »
et sinon pivot glissant (car en considérant qu’il n y a pas
de jeu entre les dents de l’engrenage, la dent en prise est
en contact des 2 côtés, et la dent ne peut alors que pivoter
et translater suivant les 2 lignes de contact),
dans le cas d’un système roue globique - vis sans fin, une liaison avec
une translation et une rotation liées (comme une hélicoïdale) et
une rotation libre.
Exemples :
1) Cas du chapitre 1 : h = 1 + 6 . (2 - 2 + 1) - (2 + 4) = 1
Le système est donc hyperstatique d'ordre 1, comme cela avait été expliqué au début du cours.
2) Cas du compresseur :
Comme les différentes pièces du mécanisme (piston, bielle et
vilebrequin) bougent toujours en même temps et de la même façon, il n'y a
qu'un mouvement « global ». La mobilité utile est donc de 1. Autrement
dit : si on bloque l’entrée (le vilebrequin) en rotation autour de
(1 mobilité), la sortie (le piston) ne translate plus.
Par contre, il n'y a pas de mobilité interne (pour en avoir une,
il suffirait de remplacer un des pivots par un pivot glissant : le vilebrequin
ou/et la bielle pourrait se translater horizontalement dans le mécanisme,
même si l’entrée avec la rotation du vilebrequin est bloquée).
h = 1 + 6 . (4 - 4 + 1) - (2 + 2 + 1 + 1) = 1
Le compresseur est donc hyperstatique d'ordre 1.
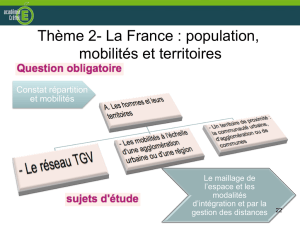
3) Cas de la pompe à main :
Comme les différentes pièces du mécanisme bougent toujours
en même temps et de la même façon, il n'y a qu'un mouvement « global ».
La mobilité utile est donc de 1. Autrement dit : si on bloque l’entrée
(le levier) en rotation autour de (1 mobilité), la sortie (le piston)
ne translate plus.
Comme le piston peut tourner autour de lui-même, même si l’entrée
avec la rotation du levier est bloquée, la mobilité interne est de 1.
h = (1 + 1) + 6 . (4 - 4 + 1) - (1 + 2 + 3 + 2) = 0
La pompe à main est donc hypostatique (cas rare dans
les mécanismes), et non pas isostatique (il faudrait qu’il n’y ait aucun
mouvement possible).
Remarque :
Le mécanisme du compresseur d’atelier est un mécanisme courant
qui fonctionne bien, pourtant d’après la théorie des mécanismes,
il est hyperstatique. Alors, pourquoi fonctionne-t-il dans la réalité ?
En fait, le schéma cinématique est un modèle (= une simplification
de la réalité) qui ne tient pas compte des jeux, des défauts géométriques
et des déformations des pièces. Ainsi, dans l'exemple du compresseur,
avec des défauts exagérés de perpendicularité et de parallélisme,
le mécanisme n'est plus montable...
T , R , R et T de la linéaire rectiligne
Une mobilité utile (R ) et aucune mobilité interne
T et R de la pivot-glissant
si engrenage
« mince » :
si engrenage
« épais » :
3 ddl
piston
1 ddl
2 ddl
2 ddl
levier

Hyperstatisme - cours V3.5.doc – JM Périnet 3/4
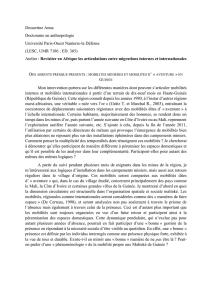
G1
G2
G3
G4
G1
G2
G3
G4
Glissière
(1 ddl)
Linéaire rectiligne
(4 ddl)
Pivot (1ddl)
Pivot (1ddl)
Linéaire rectiligne
(4 ddl)
G1
G2
G1
G2
G4
Glissière
(1 ddl)
Pivot (1ddl)
Linéaire rectiligne
(4 ddl)
G4
piston
bâti
La formule n'indique pas où se trouve l’origine de l'hyperstatisme.
Pour la trouver, il faut trouver les mobilités supprimées par toutes
les liaisons du mécanisme (dans le cas du compresseur, on trouve ainsi
T et R). Si le nombre de ces mobilités (ici, 2) ne correspond pas à l’ordre
d’hyperstaticité (c’est le cas du compresseur, qui est hyperstatique
d’ordre 1), il faut suivre la démarche suivante :
« ouvrir » le mécanisme au niveau d’une liaison (par exemple )
et y appliquer des défauts géométriques (ici, de position
suivant et d’orientation autour de ),
parmi les mobilités suspectes (ici, T et R), déterminer
les mobilités manquantes pour « refermer » le mécanisme.
Par l’intermédiaire des liaisons , et , le piston peut être
déplacé suivant pour rentrer dans l’alésage du bâti. A contrario, les liaisons , et
n’autorisent pas le piston à être redressé dans l’alésage du bâti autour de . Le problème
d’hyperstatisme provient donc de R.
Toutes les surfaces de guidage pour chaque groupe cinématique
doivent donc être bien orientées en rotation autour de :
sur le piston, l’arbre intérieur et la jupe doivent être bien
perpendiculaires,
sur le vilebrequin, l’arbre et le maneton doivent être bien
parallèles,
sur la bielle, les 2 alésages doivent être bien parallèles,
sur le bâti, les 2 alésages doivent être bien perpendiculaires.
4. Cas de système avec plusieurs boucles cinématiques
Dans un premier temps, il faut calculer l’ordre d’hyperstaticité complet du modèle, puis étudier
boucle par boucle le modèle pour comprendre l’origine de l’hyperstatisme.
Exemple : la pince New-Mat
1) Schéma cinématique et graphe de liaisons de la pince complète :
Ordre d’hyperstaticité : h = m + 6 x ( l – n + 1 ) – Nc = (1+0) + 6 x (5-4+1) – (1+1+1+4+4) = 2
Pour trouver l’origine de l’hyperstatisme, il faut étudier les 3 boucles du modèle. Comme le système
est symétrique, il est intéressant d’étudier soit la boucle supérieure, soit la boucle inférieure (si l’une
est hyperstatique d’ordre 1, l’autre l’est aussi, et on aura donc trouvé l’origine de l’hyperstatisme du modèle
complet).
2) Schéma cinématique et graphe de liaisons de la boucle inférieure :
Ordre d’hyperstaticité : h = m + 6 x ( l – n + 1 ) – Nc = (1+0) + 6 x (3-3+1) – (1+1+4) = 1
La boucle inférieure (et donc la boucle supérieure) est hyperstatique d’ordre 1.

Hyperstatisme - cours V3.5.doc – JM Périnet 4/4
3) Compréhension de l’hyperstatisme du modèle :
Toutes les liaisons bloquent les mobilités en translation suivant et en rotation autour de et
autour de . Si on ouvre le mécanisme au niveau de la liaison entre G2 et G4, on se rend compte que :
on peut refermer le système suivant T en tournant G4 grace au pivot,
on peut refermer le système autour de , car même si la « ligne inférieure du prisme » de
la linéaire rectiligne est mal orientée autour de , il y aura toujours contact avec le plan de
la linéaire rectiligne,
on ne peut pas refermer le système autour de , car si la « ligne inférieure du prisme » de
la linéaire rectiligne est mal orientée autour de , il n’y aura pas contact avec le plan de
la linéaire rectiligne. Cette mobilité est donc à l’origine de l’hyperstatisme.
4) Conséquence sur la cotation des groupes cinématiques :
Les surfaces de guidage des différents groupes cinématiques doivent donc être bien orientées
autour de . Comme bouge dans le plan quand la pince s’ouvre ou se ferme, les surfaces de guidage
des différents groupes cinématiques doivent donc être bien orientées autour de et de
5. Conclusion sur l’hyperstaticité des modèles de mécanismes
Pour qu’un mécanisme réel puisse fonctionner malgré un modèle cinématique hyperstatique, il faut
exiger/mettre en œuvre les points suivants :
des spécifications d'orientation ( ) et/ou de positionnement ( )
« relativement » précises entre les surfaces de guidage,
des jeux « relativement » importants dans les guidages, mais avec pour conséquences :
o une usure / un matage plus important,
o des risques de coincement,
o une diminution de la précision du mécanisme.
Un compromis doit donc être trouvé.
des pièces relativement souples (exemple : une chaise à 4 pieds ne devrait pas avoir ses 4 pieds
toucher le sol en même temps, sauf si elle est suffisamment souple...),
ajouter ou modifier des liaisons pour réduire l'hyperstatisme, mais le mécanisme sera plus
compliqué et plus cher,
mettre en place des réglages.
De la même manière, il faut étudier aussi l’hyperstatisme de chaque guidage et de chaque
encastrement réalisés par plusieurs surfaces de contact.
Attention : les efforts et/ou les dilatations thermiques appliqués sur les pièces les déforment et peuvent
rendre certaines de ces solutions caduques.
1
/
4
100%