Filtres : Fonctions de Transfert et Quadripôles Linéaires
Telechargé par
ashley djouaka

Q Filtres (32-102) Page 1 sur 25 JN Beury
FILTRES
I. FONCTION DE TRANSFERT POUR UN QUADRIPÔLE LINÉAIRE
I.1 Quadripôle, linéarité, filtre, équation différentielle
On appelle quadripôle un réseau électrique dont on distingue deux entrées et deux sorties.
• On suppose ce quadripôle linéaire : si on applique
(
)
(
)
(
)
11 2 2EE E
vt v t v t
αα
=+ avec 12
et
α
α
réels, alors à la
sortie, on a
() () ()
11 2 2SS S
vt v t v t
αα
=+ en appelant
(
)
1S
vt
la sortie du quadripôle excité par l’entrée
(
)
1E
vt
et
()
2S
vt la sortie du quadripôle excité par l’entrée
(
)
2E
vt. On peut montrer que
(
)
E
vt et
()
S
vt sont alors reliés par
une équation différentielle linéaire :
-1 -1
110 1 10
1 1
dd d dd d
... ...
dd d d d d
nn mm
SS S EEE
nn Sm m E
nn m m
vv v vvv
aa aavb b bbv
tt t t t t
−−
− −
++++=+ +++
L’ordre du circuit linéaire, appelé également filtre linéaire est max(m, n).
• On suppose le circuit invariant temporellement. Si la réponse du circuit à un signal
()
E
vtest
()
S
vt, la réponse
du même signal retardé
()
Ed
vtt− est
(
)
Sd
vtt
−
quelque soit le retard. On peut montrer que les coefficients de
l’équation différentielle sont constants.
Un quadripôle linéaire est régi par une équation différentielle à coefficients constants.
I.2 Définition d’un filtre
Un filtre est un opérateur linéaire pour lequel il existe, entre le signal d’entrée e(t) et le signal de sortie s(t), une
relation de la forme :
-1 -1
110 110
11
dd d d d d
... ...
dd d d d d
nn mm
nn mm
nn mm
sss eee
aa aasb b bbe
tt t t t t
−−
−−
++++=++++
e et s peuvent désigner des tensions ou des courants.
Par la suite, on étudiera des tensions que l’on notera vE et vS.
I.3 Résolution de l’équation différentielle
La résolution se fait en deux étapes :
• solution générale de l’équation différentielle homogène (régime libre)
• solution particulière de l’équation différentielle (régime permanent).
v
E
v
S
Quadripôle

Q Filtres (32-102) Page 2 sur 25 JN Beury
I.4 Théorème de superposition
Si le second membre
(
)
E
vtest la somme de plusieurs termes :
(
)
(
)() ()
,1 ,2 ,
...
EE E Eq
vt v t v t v t=+++, la solution
particulière de l’équation différentielle
nn-1 mm-1
110 1 10
1 1
dd d dd d
... ...
dd d d d d
SS S EEE
nn Sm m E
nn m m
vv v vvv
aa aavb b bbv
tt t t t t
− −
− −
++++=+ +++
s’écrit alors :
() () ()
(
)
,1 ,2 ,
...
SS S Sq
vt v t v t v t=+++
avec
()
,Si
vt solution particulière de l’équation différentielle avec une tension d’entrée (excitation)
()
,Ei
vt
(i varie de 1 à
q).
La réponse à une somme d’excitations est donc la somme des réponses à chacune des excitations appliquées
séparément.
Remarque : Le théorème de superposition découle directement de la définition de la linéarité.
I.5 Fonction de transfert
Sous réserve que le régime libre soit amorti (la condition de stabilité pour un système linéaire du premier ou deuxième
ordre est d’avoir les coefficients de l’équation différentielle homogène de même signe), il ne reste que le régime
permanent que l’on appelle régime forcé.
On cherche une solution particulière de la même forme que le second membre. Si le second membre est sinusoïdal
() ( )
cos
EEm E
vt V t
ω
θ
=+, cela revient à chercher une sinusoïde de même pulsation avec une amplitude et une phase à
calculer que l’on peut écrire
() ( )
cos
SSm S
vt V t
ω
θ
=+ : on parle de régime sinusoïdal forcé.
On utilise la méthode des complexes : Il suffit de remplacer formellement dans l’équation différentielle d
dt par j
ω
, vE
et vS par leur amplitude complexe.
()
()
()
(
)
()
()
()
()
exp exp
cos
cos exp
exp
EEm E EEm E
EEm E
SSm S SSm S
SSm S
vV jt VV j
vV t
vV t VV j
vV jt
ωθ
θ
ωθ
ωθ
θ
ωθ
=+
=
=+
⇒⇒
=+ =
=+
L’équation différentielle devient :
() () () () () ()
1 1
110 110
... ...
nn mm
Sn n Em m
Vaj a j aj a Vb j b j bj b
ωω ω ωω ω
− −
− −
++++= + +++
On en déduit :
(
)
(
)
(
)
() () ()
1
110
1
110
...
...
mm
Smm
nn
Enn
Vbj b j bj b
Vaj a j aj a
ωω ω
ωω ω
−
−
−
−
+
++ +
=++++
On définit la fonction de transfert d’un quadripôle par la relation :
()
S
E
V
Hj V
ω
=
Interprétation physique :
•
()
SSm
Sm
E
VV
H
jG
V
V
ω
=== est appelé gain du quadripôle (noté G).
•
()
arg arg arg
SESE
Hj V V
ω
θθ θ
=−=−= est le déphasage de la sortie par rapport à l’entrée.
On s’arrangera à avoir
θ
compris entre
π
− et
π
.

Q Filtres (32-102) Page 3 sur 25 JN Beury
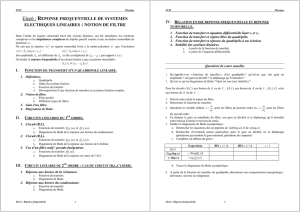
f
(t)
t
T
voie 1 voie 2
La voie 1 est en avance de phase sur la voie 2
car elle passe par un maximum en premier
t
1
• Si 0
θ
>, alors SE
θ
θ
> : vS est en avance de phase1 sur vE.
La durée T correspond à 2
π
.
La durée t1 correspond à
θ
, donc
1
2t
T
ϕ
π
=
.
• Si 0
θ
<, alors SE
θ
θ
< : vS est en retard de phase sur ve.
Quelques cas particuliers :
Si 0
θ
=, vS et vE sont en phase.
Si 2
π
θ
=, on dit que vS est en quadrature avance sur vE.
Si
θ
π
=± , vS et vE sont en opposition de phase.
On définit le gain en décibels : 20log
dB
GG= (log désigne le logarithme décimal). On a un facteur 20 pour G
alors qu’on a un facteur 10 pour la puissance moyenne en dB.
On appelle l’ordre du quadripôle le maximum de m et de n.
Un tel quadripôle pourra donc être utilisé pour affaiblir ou amplifier l’amplitude d’un signal (filtre d’amplitude).
On pourra l’utiliser pour introduire des variations sur la phase de certaines composantes spectrales d’un signal (filtre de
phase).
On pose souvent la variable de Laplace : pj
ω
=.
Un filtre est passif s’il ne contient que des éléments linéaires passifs (résistances, condensateurs, auto et mutuelle
inductances).
Un filtre est actif s’il contient des éléments tels qu’amplificateurs opérationnels, transistors…
Attention, en fait, les circuits réels présentent des limitations :
• Fréquence de coupure propre du circuit intégré.
• Saturation
• Défauts de non linéarité (slew rate par exemple pour un AO).
I.6 Condition de stabilité
• La condition de stabilité pour un système linéaire du premier ou deuxième ordre est d’avoir les coefficients de
l’équation différentielle homogène de même signe.
• On admet que la fonction de transfert doit rester finie pour toute valeur de
ω
, en particulier pour
ω
→∞. On doit
donc avoir nm≥. Le circuit est donc d’ordre n.
1 Attention, beaucoup d’erreurs pour savoir quel signal est en avance sur l’autre…

Q Filtres (32-102) Page 4 sur 25 JN Beury
x
= log
ω
ω
11,
3
12 3
,
7
1
0
2
0
5
0
10
0
1000
I.7 Cas de signaux quelconques
Tout signal périodique vE(t) de période T peut s’écrire en utilisant la décomposition en série de Fourier :
()()
00
11
( ) cos sin cos , avec entier
Enn nn
nn
vt a a nt b nt c c nt n
ωω ωϕ
∞∞
==
=+ + =+ +
∑∑
• 11
cos sinatbt
ω
ω
+ : terme fondamental (de même pulsation que le signal)
• cos sin
nn
antbnt
ω
ω
+ : terme harmonique de rang n (de pulsation n
ω
).
avec 2
T
π
ω
= la pulsation du signal.
Pour calculer la réponse à une excitation, il suffit de faire la somme des réponses à chacun des harmoniques.
L’étude de signaux sinusoïdaux de pulsation
ω
ne restreint pas l’étude puisqu’on peut s’y ramener pour des signaux
périodiques1. On ne s’intéressa donc par la suite qu’à des signaux sinusoïdaux de pulsation
ω
.
II. DIAGRAMME DE BODE
II.1 Définition
Pour représenter graphiquement le gain et la phase sur un large domaine de fréquences, on utilise une échelle
logarithmique. On représente donc en abscisse log
ω
. On représente parfois log f, ou
0
log logu
ω
ω
=
Le diagramme de Bode est constitué des deux courbes :
Pour la pulsation 1
ω
, on définit 11
logx
ω
=. Pour la pulsation 2
ω
, on définit 22
logx
ω
=
L’écart entre x1 et x2 est : 2
21 2 1
1
log log logxx x
ω
ωω
ω
∆= − = − =
• Si 21
2
ω
ω
=, on a log 2 0,3x∆= = . On dit qu’on a une octave.
• Si 21
10
ω
ω
=, on a log10 1x
∆
==. On dit qu’on a une décade.
1 Le cas de signaux quelconques se traite par la transformée de Fourier qui est hors programme. On se ramène in fine à des signaux sinusoïdaux.
On peut avoir
log
ω
< 0 !
dB
G
log
ω
θ
log
ω

Q Filtres (32-102) Page 5 sur 25 JN Beury
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%