See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/257705848
Physiologie et physiopathologie du contrôle postural
ArticleinLa Lettre de médecine physique et de réadaptation · September 2012
DOI: 10.1007/s11659-012-0316-1
CITATIONS
13
READS
18,689
1 author:
Dominic Pérennou
Centre Hospitalier Universitaire de Grenoble
301 PUBLICATIONS6,864 CITATIONS
SEE PROFILE
All content following this page was uploaded by Dominic Pérennou on 09 December 2014.
The user has requested enhancement of the downloaded file.

ARTICLE DE SYNTHÈSE / REVIEW ARTICLE DOSSIER
Physiologie et physiopathologie du contrôle postural
Physiology and pathophysiology of postural control
D. Pérennou
© Springer-Verlag France 2012
Résumé Le contrôle postural permet non seulement le main-
tien d’une position donnée, mais aussi et surtout le mouve-
ment en fournissant une base stabilisée pour l’action. Il est
contrôlé par les mécanismes de régulation du tonus muscu-
laire, et surtout par des processus cérébraux complexes assu-
rant un contrôle dissocié pour l’orientation et la stabilisation
posturale. Le cerveau est l’organe de l’équilibre.
Mots clés Phyisiologie · Physiopathologie · Contrôle
postural · Tonus musculaire · Équilibre · Cerveau
Abstract Postural control allows, not only maintaining a
position, but also and especially the movement, by providing
a stabilized base for action. It is controlled by the regulation
mechanisms of muscle tone, and especially by complex
brain processes, which provide dissociated control for orien-
tation and postural stabilization. The brain is the organ of
balance.
Keywords Physiology · Pathophysiology · Postural control ·
Muscular tone · Balance · Brain
Introduction
Une posture est une attitude, définie par la position relative
des segments corporels ainsi que par leur orientation dans
l’espace. Plus généralement, la terminologie posture trans-
cende la simple description d’une géométrie corporelle par-
ticulière et sous-entend les mécanismes nerveux qui régulent
les variations d’attitude, intentionnelles ou non. La finalité
du contrôle postural est triple : participer à l’élaboration des
représentations spatiales, assurer l’équilibre, et fournir une
base stabilisée à l’action. La connaissance implicite de la
géométrie corporelle dans l’espace est indispensable à l’éla-
boration des systèmes de coordonnées spatiales. Cela tient
non seulement pour les systèmes de coordonnées égocentrés
(centrés le plus souvent sur la tête ou le tronc) mais aussi
pour les systèmes de coordonnées exocentrés (centrés sur
un point de l’environnement). Tous deux sont utiles à la
perception consciente du monde qui nous entoure et à la
sélection de référentiels pertinents pour l’organisation de
l’action. La recherche de l’équilibre est le facteur détermi-
nant de l’organisation de la posture. Maintenir la posture
de référence ou au contraire l’adapter à l’environne-
ment implique de prendre en compte non seulement les
contraintes internes (masses corporelles), mais également
les contraintes externes : gravité, stabilité des appuis sur un
support et perturbations [1]. L’équilibre postural est assuré
lorsque la projection au sol du centre de masse peut être
maintenue à l’intérieur de la surface d’appui. Pour réduire
les effets déstabilisants de la gravité, il est nécessaire
d’orienter le corps de façon optimale d’une part (orienta-
tion), et d’autre part, de minimiser les oscillations autour
de cette orientation (stabilisation). La notion d’un contrôle
dissocié pour l’orientation et la stabilisation posturale a été
proposée il y a une quinzaine d’années [2]. C’est par cette
approche aujourd’hui bien acceptée que nous envisageons
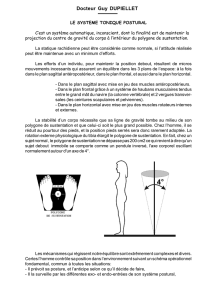
les aspects posturocinétiques dans cette revue (Fig. 1). En
définitive, le contrôle postural permet non seulement le
maintien d’une position donnée, mais aussi et surtout le
mouvement, en fournissant une base stabilisée pour l’action.
Le tonus musculaire et les réflexes posturaux
Le tonus musculaire, essentiellement le tonus des muscles
extenseurs, est l’artisan principal de la lutte antigravitaire et
les mécanismes qui le distribuent sont des mécanismes élé-
mentaires de contrôle postural. L’EMG des muscles tibialis
et soleus en position érigée non perturbée permet d’illustrer
le rôle du tonus musculaire dans le maintien de cette posture.
Dans certaines conditions, il est parfois possible d’enregis-
trer une activité sur les muscles soleus alors que les muscles
tibialis peuvent être silencieux [3]. La distribution du tonus
postural est essentiellement régulée par des circuits situés
D. Pérennou (*)
Université Joseph Fourier, Grenoble 1,
clinique MPR-labo TimC CNRS,
Institut de rééducation-hôpital sud, CHU Grenoble BP 338
e-mail : [email protected]
Lett. Méd. Phys. Réadapt. (2012) 28:120-132
DOI 10.1007/s11659-012-0316-1

dans la moelle épinière et le tronc cérébral. En s’opposant à
tout allongement musculaire, donc à tout déplacement de
segment corporel, le réflexe d’étirement (spinal) participe
en théorie au maintien des postures érigées. Il s’agit d’une
réponse à courte latence dont le rôle fonctionnel est faible.
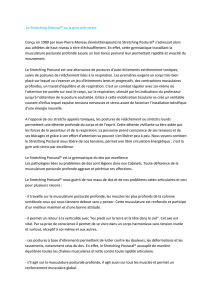
Lorsqu’elle requiert une contraction de certains muscles, la
stabilisation corporelle est assurée par des réponses supras-
pinales à moyenne et longue latences (Fig. 2). Les réflexes
toniques labyrinthiques, d’origine otolithique, répartissent le
tonus entre l’hémicorps droit et le gauche, en l’augmentant
du côté où la tête est inclinée. Les réflexes toniques du cou
répartissent le tonus postural entre les membres supérieurs
ou inférieurs. Lorsque la tête est tournée d’un côté, le tonus
est augmenté dans les muscles extenseurs de ce côté. Ces
deux derniers types de réflexes sont présents à la naissance
et disparaissent ensuite pour être intégrés dans des répertoi-
res sensorimoteurs plus élaborés (Fig. 3). Leur réapparition
dans des situations extrêmes ou en pathologie est une notion
classique bien que peu documentée chez l’homme. De
nature tactile, visuelle ou labyrinthique, les réactions de pla-
cement préparent le positionnement de la jambe et du pied
sur un support [4]. La réaction de support positive est une co-
contraction des muscles jambiers induite par le contact du
pied au sol [4]. Déclenchée par les informations cutanées
plantaires et la proprioception des muscles intrinsèques, elle
aurait pour but de raidir les articulations du pied et la cheville
afin de supporter le poids du corps. Classiques chez le chat,
les réflexes de redressement rétablissent la position de réfé-
rence et permettent à l’animal de réaligner le corps sur la tête
pour atterrir sur les pattes après une chute libre. Cette réac-
tion a été décrite chez la plupart des espèces, dont l’homme.
Les trois derniers types de réflexes ont néanmoins surtout
été étudiés chez le chat et restent peu documentés chez
l’homme.
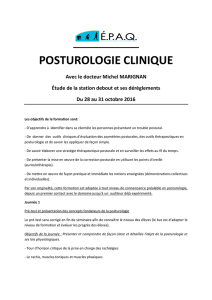
Fig. 1 Schéma général de l’organisation du contrôle postural, en coordination avec le mouvement
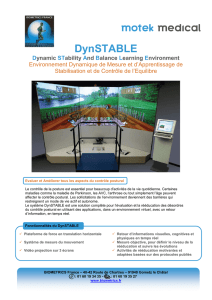
Fig. 2 Illustration des réponses musculaires induites par une
perturbation posturale (ici une rotation autour des chevilles). Les
deux premières réponses sont enregistrées sur l’agoniste étiré
(ici le muscle gastrocnémien médial). La première réponse de courte
latence (SL) correspond au réflexe d’étirement dont la valeur fonc-
tionnelle est faible. Lorsque la perturbation est une rotation orteils
vers le haut autour de la cheville, la deuxième réponse de moyenne
latence est déstabilisatrice. La troisième réponse de longue latence
(> 100 ms) est une contraction de l’antagoniste (ici le tibialis)qui
rétablit l’équilibre. Figure adaptée d’après Bloem et al [116]
Lett. Méd. Phys. Réadapt. (2012) 28:120-132 121

La répartition du tonus entre muscles postérieurs et anté-
rieurs ainsi qu’entre muscles hémicorporels gauches et droits
est dévolu aux voies vestibulospinales. Une perturbation
asymétrique sur les voies vestibulospinales, causée par une
lésion vestibulaire périphérique ou une atteinte dans le tronc
cérébral (par exemple syndrome de Wallenberg avec atteinte
des noyaux vestibulaires dans la fossette latérale du bulbe)
peut induire une latéropulsion (inclinaison de l’ensemble
du corps latéralement) sans trouble associé de la cognition
spatiale, notamment sans anomalie du référentiel de vertica-
lité [5,6].
Orientation posturale
Sur terre, la gravité est l’unique référence absolue et la repré-
sentation de la verticale (verticale subjective) est normale-
ment très précise. Une manipulation des informations visuel-
les peut modifier inconsciemment l’orientation corporelle
[7,8], mais la contribution de la vision à l’orientation anti-
gravitaire n’est habituellement pas aussi cruciale que l’infor-
mation graviceptive [9-12]. L’information graviceptive
somesthésique est normalement suffisante pour estimer la
verticalité, même si la disponibilité des signaux vestibulaires
améliore cette perception [13]. L’information graviceptive
d’origine somesthésique est fournie par divers gravicepteurs
viscéraux possiblement distribués autour des reins et des
gros vaisseaux [14-16], ainsi que par la proprioception Ia
[17] et Ib [15,16]. L’information de pression fournie par les
capteurs cutanés participe également à la construction du
référentiel de verticalité [5,12,18,19]. La graviception vesti-
bulaire est fournie par les otolithes. Les graviceptions vesti-
bulaires et somesthesiques sont synthétisées par le cerveau
au niveau du thalamus posterolatéral [13], puis confrontées
aux information de verticale données par la vison, probable-
ment à un niveau cortical.
Les troubles de l’équilibre liés à une anomalie dans le
référentiel de verticalité sont, dans leurs fortes caractéris-
tiques, liés à une latéropulsion ou à une rétropulsion, le sujet
orientant inconsciemment son corps sur une verticale bio-
logique inclinée, qui peut être estimée de plusieurs façons
[20], visuelle, tactile et posturale (Fig. 4). La verticale
visuelle (VV), est évaluée en demandant au sujet dans l’obs-
curité d’ajuster verticalement une ligne lumineuse. La verti-
cale posturale est évaluée en demandant à un sujet assis et
capitonné sur un support mobile (dans l’obscurité) d’indi-
quer pour quelle orientation du support il se sent vertical
(VP). Le sujet mobilise lui-même le système en roulis
(plan frontal) ou en tangage (plan sagittal) à l’aide d’un
potentiomètre, ou bien est mobilisé par l’examinateur. Les
afférences sensorielles utilisées pour construire VV et VP
diffèrent, ce qui explique les dissociations entre ces deux
modes de perception de la verticale [5,11,21,22]. VV et VP
apportent des informations complémentaires, VV testant la
contribution visuovestibulaire à la construction du sens de
verticalité et VP testant la contribution somesthésique. VV
est sensible aux torsions oculaires, induites notamment par
les lésions sur les voies vestibulaires, de l’oreille interne au
cortex vestibulaire [22,23] et est un test de référence pour
tester les otolithes. En s’inspirant de la théorie écologique
de la perception qui postule l’indivision entre perception et
action [24,25], Stoffregren et al. [25] ont proposé une nou-
velle approche de l’orientation antigravitaire selon laquelle
le maintien actif d’une posture érigée fournirait en lui-même
l’information pertinente sur la verticale.
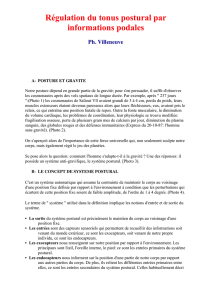
Fig. 3 Illustrations des réflexes toniques du cou chez un nouveau-
né et un sportif de haut niveau. La rotation de la tête d’un côté est
associée à une augmentation du tonus dans les muscles extenseurs
ipsilatéraux (d’après Fukuda, modifié par Ghez [117]). Ces réflexes
peuvent être observés chez les patients en état végétatif chez qui
une extension d’un membre supérieur est accompagnée d’une rota-
tion de la tête de ce côté et d’une flexion du membre supérieur
contralatéral
Fig. 4 Trois modalités d’estimation de la verticale, visuelle, tactile
(haptique) et posturale. Figure adaptée d’après Pérennou et al [20]
122 Lett. Méd. Phys. Réadapt. (2012) 28:120-132

Quelles sont les structures cérébrales impliquées dans le
contrôle de l’orientation antigravitaire ? En établissant un
tableau de concordance entre la localisation des lésions céré-
brales et la direction de la VV, Brandt et Dietrich ont contribué
de façon importante à la connaissance des structures cérébra-
les impliquées dans la perception de la verticale [26-28].
Leurs observations ont été récemment confirmées par l’utili-
sation des techniques modernes d’imagerie cérébrale [13,29].
Schématiquement, une atteinte de la région latérobulbaire
(comprenant les noyaux vestibulaires) entraîne une inclinai-
son ipsilésionnelle de la VV alors qu’une lésion de l’insula
et/ou l’opercule pariétal (cortex vestibulaire) peut entraîner un
biais contralésionnel de la VV (Fig. 5). La verticale posturale
est surtout affectée par les lésions du thalamus postérolatéral
et du cortex pariétal [5].
La question de l’orientation antigravitaire se pose aussi,
bien entendu, pour le plan sagittal, mais les éléments de
réponse sont limités à la verticale posturale [17,30]. Il faut
aussi ajouter que le plus souvent, le corps est volontairement
orienté vers une cible ou dans un but particulier, ce qui
nécessite une coordination entre le contrôle de la posture et
le contrôle du mouvement.
La stabilisation posturale
D’un point de vue mécanique, il y a équilibre lorsque la
résultante des forces est nulle d’une part, et d’autre part
quand la résultante des moments est nulle. L’orientation
étant établie, l’équilibre s’obtient par la mise en jeu possible
de plusieurs mécanismes de stabilisation et la combinaison
optimale orientation/stabilisation varie en fonction de la
tâche, des capacités et du « style individuel ». L’équilibre
debout en condition clémente est régulé principalement par
l’intermédiaire des muscles des chevilles et la projection au
sol du centre de masse est confinée à l’intérieur d’une petite
surface. L’utilité de maintenir l’ensemble du corps érigé peut
parfois s’effacer devant les contraintes de stabilisation. C’est
le cas par exemple lorsque le sujet élève latéralement un
membre inférieur en inclinant le tronc vers le membre infe-
rieur opposé [31]. L’équilibre locomoteur est une tâche
complexe, impliquant de réussir un compromis entre la pro-
pulsion du corps vers l’avant et la nécessité d’en maintenir la
stabilité latérale. Afin de pouvoir faire face aux multiples
situations et simplifier la commande nerveuse [32], le cer-
veau utilise un certain nombre de combinaisons motrices
éprouvées, en partie innées et en partie acquises. Elles sont
en nombre limité et stockées dans un répertoire qui
comprend en principe les éléments de réponse appropriés
aux situations usuelles [33]. Ce répertoire est flexible et de
nouvelles stratégies peuvent être apprises alors que d’autres
sont inhibées car devenues inutiles ou néfastes, du fait d’une
modification de contexte (Fig. 6). Bien que l’implication
du cortex dans la capacité d’apprentissage postural ait
été démontrée chez le chien [34], les corrélats anatomiques
précis sous-tendant cette mémoire implicite ne sont pas
connus.
Le choix d’un référentiel stabilisé
La stabilisation de certains segments sur l’espace (la gravité)
peut constituer un objectif de contrôle postural, notamment
lors du mouvement. Dans le cas de la locomotion par exem-
ple, le contact avec le sol est intermittent et ne peut plus
constituer une référence permanente sur laquelle s’appuyer
pour contrôler l’équilibre. La stabilisation d’un module
donné revêt deux fonctions essentielles. La première est de
permettre une évaluation des perturbations de la posture et
de l’équilibre. La deuxième est de fournir un système de
coordonnées égocentré à partir duquel l’action intentionnelle
est codée. Du fait de sa richesse en capteurs détecteurs d’er-
reur (vision, vestibule, proprioception du cou), la tête est
probablement le meilleur candidat à la stabilisation segmen-
taire chez l’adulte. Les deux modes principaux de stabilisa-
tion de la tête ont été précisés par Nashner [35] : par rapport à
l’espace (stable-platform strategy) ou sur le tronc (strap-
down strategy). Dans la stable-platform strategy (stabilisa-
tion de la tête sur l’espace), qui repose en partie sur le réflexe
vestibulocolique, la tête stabilisée sur la gravité est utilisée
comme une plateforme inertielle de navigation pour l’éva-
luation visuelle ou vestibulaire des positions par rapport à
Fig. 5 Cartographie des AVC hémisphériques (coupes axiales)
dans un groupe de patients qui ont ou n’ont pas de biais de la verti-
cale visuelle. La différence entre ces deux groupes, illustrée en C
(couleur jaune), se situe principalement sur l’insula. Figure adaptée
d’après Barra et al [13]
Lett. Méd. Phys. Réadapt. (2012) 28:120-132 123
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%