Docteur Guy DUPIELLET

LE SYSTEME TONIQUE POSTURAL
C’est un système automatique, inconscient, dont la finalité est de maintenir la
projection du centre de gravité du corps à l’intérieur du polygone de sustentation.
La statique rachidienne peut être considérée comme normale, si l’attitude réalisée
peut être maintenue avec un minimum d’efforts.
Les efforts d’un individu, pour maintenir la position debout, résultent de micros
mouvements incessants qui assurent un équilibre dans les 3 plans de l’espace: à la fois
dans le plan sagittal antéropostérieur, dans le plan frontal, et aussi dans le plan horizontal.
- Dans le plan sagittal avec mise en jeu des muscles antéropostérieurs.
- Dans le plan frontal grâce à un système de haubans musculaires tendus
entre le grand mât du navire (la colonne vertébrale) et 2 vergues transver-
sales (les ceintures scapulaires et pelviennes).
- Dans le plan horizontal avec mise en jeu des muscles rotateurs internes
et externes.
La stabilité d’un corps nécessite que sa ligne de gravité tombe au milieu de son
polygone de sustentation et que celui-ci soit le plus grand possible. Chez l’homme, il se
réduit au pourtour des pieds, et la position pieds serrés sera donc rarement adoptée. La
rotation externe physiologique du tibia élargit le polygone de sustentation. En fait, chez un
sujet normal , le polygone de sustentation ne dépasse pas 200 cm2 ce qui revient à dire qu'un
sujet debout immobile se comporte comme un pendule inversé, l'axe corporel oscillant
normalement autour d'un axe de 4°.
Les mécanismes qui régissent notre équilibre sont extrêmement complexes et divers.
Certes l’homme contrôle sa position dans l’environnement suivant un schéma opérationnel
fondamental, commun à toutes les situations:
- Il prévoit sa posture, et l’anticipe selon ce qu’il décide de faire,
- Il la surveille par les différentes exo- et endo-entrées de son système postural,
Docteur Guy DUPIELLET

- Il la corrige par une activité musculaire,
Ce système fonctionne grâce à la régulation centrale d’informations sensoriel-
les qui vont permettre une réponse adaptée.
De très nombreuses expérimentations ont montré que nous utilisons différentes
stratégies de contrôle de l'équilibre totalement dépendantes de la position de nos pieds au
sol.
EXPERIMENTATIONS
Le centre de gravité du corps étant un point hypothétique, non matériel, il est très
difficile à étudier. On substitue donc à l'étude du centre de gravité, l'étude du déplacement
des centres de pression d'un sujet debout. Pour cela, on place le sujet sur des plates formes
de force (plate forme de stabilométrie) qui enregistrent à chaque instant la projection au sol
des centres de pression. Il s'agit du statokinésigramme qui renseigne donc sur la position
du centre de gravité.
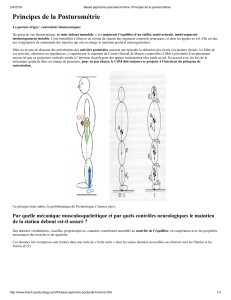
On a pu démontrer que nous utilisions différentes straté-
gies de contrôle. Dans le cas où les pieds se trouvent l'un à
côté de l'autre, en position de Romberg postural, la position
du centre de pression est régulé au niveau latéral par les
hanches alors qu'en antéropostérieur la position est régulée
par l'articulation des chevilles. En Romberg sensibilisé, un
pied devant l'autre, c'est l'inverse : l'équilibre latéral est
régulé par les chevilles et l'équilibre antéropostérieur par les
hanches. Ceci démontre bien que la stratégie utilisée dépend
de nos conditions d'appui et du polygone de sustentation.
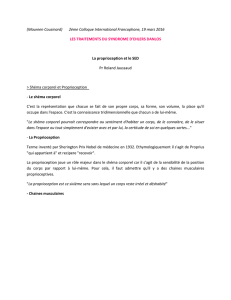
Il est facile de montrer en matière
d'équilibre que la même information est
traitée différemment par le système ner-
veux central selon les informations four-
nies par les divers capteurs. Sur un
sujet debout immobile, yeux fermés,
appuyé contre un mur qui l'informe en
permanence de son immobilité, on pro-
voque une vibration du soléaire au ni-
veau du tendon d'Achille, à une fré-
quence de 70 Hz. Ceci crée une sensa-
tion d'étirement du muscle comme si le
sujet était penché en avant. S'il n'est
pas maintenu, il se penche en arrière
pour rétablir l'équilibre et tombe. Si l'on fait la même expérience, yeux ouverts, le sujet se
rend bien compte que l'environnement visuel ne bouge pas, donc il ne se penche pas en
arrière mais il a l'impression d'être penché en avant.

De même de très nombreuses expérimentations ont montré une amélioration constante
de la régulation posturale par la vision.
Si l'on augmente les surfaces de contact entre la peau des pieds d'un sujet et
l'environnement en lui faisant porter des chaussures montantes on constate sur la plate-
forme de stabilométrie une réduction de la surface du statokinésigramme et une diminution
de l'amplitude des oscillations posturales.
Si l'on modifie la surface de contact de la sole plantaire en disposant régulièrement
sur la plate-forme des plombs de chasse de 2 mms, à demi enchâssés dans un support dur,
on constate également une réduction de la surface des statokinésigrammes qui varie en
fonction de l'écartement des plombs (semelles proprioceptives).
Le système tonique postural fonctionne grâce à des informations sensorielles
qui sont de 2 types :
- celles qui perçoivent la position de notre corps par rapport à l’environne-
ment, c’est ce qu’on appelle les exo-entrées liées aux exo-capteurs ou en-
core entrées primaires.
- celles qui informent sur la position des différentes parties de notre corps
et relient les entrées primaires entre elles, liées aux endo-capteurs. On
les appelle endo-entrées ou encore entrées secondaires.
LES ENTREES PRIMAIRES
Ce sont les pieds, les yeux, les vestibules.
LE PIED
Capteur primaire du système tonique postural, avec l'oeil et le vestibule, il intervient
dans toutes les situations qu'elles soient statiques ou dynamiques en station verticale. En
effet les soles plantaires indiquent en permanence la pression différentielle entre les 2
voûtes plantaires, permettant ainsi de percevoir les irrégularités du sol et d'adapter des
réflexes d’équilibre en conséquence.
La voûte plantaire est innervée par un seul et même nerf,
le nerf tibial postérieur (continuité su sciatique poplité
interne) qui se divise en 3 branches, le nerf calcanéen
interne, plantaire interne et plantaire externe.
Il existe seulement un petit filet du saphène interne (
branche terminale du nerf crural ) qui innerve une petite
zone de l'arche interne.

Le pied possède une très grande variété de capteurs :
- des mécanorécepteurs cutanés
soit dans le derme, soit dans le tissu sous-cutané, qui enregistrent les pressions,
leurs variations mais également, pour certains, les étirements cutanés et la direction de ces
étirements.
Ces récepteurs sont particulièrement nombreux dans les zones d'appui. Le seuil de
sensibilité à une stimulation mécanique de la peau correspond à un enfoncement de 6 µm
ce qui correspond à des pressions de moins de 1 gramme.
- des capteurs proprioceptifs
qui nous permettent de connaître la position des différentes pièces osseuses
les unes par rapport aux autres et la tension des différents muscles.
On en trouve dans les muscles, ce sont les fuseaux neuro-musculaires qui
enregistrent les variations de longueur. On en reparlera.
On en trouve dans les tendons, ce sont les organes neuro-tendineux de Golgi

sensibles aux tensions.
On en trouve dans les articulations et les tissus péri-articulaires.
Le pied est donc fondamental dans la régulation posturale.
LE CAPTEUR OCULAIRE
Il donne 2 types d'informations:
- une information visuelle liée à la transmission au système nerveux central de l'image
rétinienne c’est l’entrée primaire
- une information oculo-motrice liée à la tension des muscles oculo-moteurs externes. C’est
l’entrée secondaire
L'information rétinienne informe à la fois sur la position et sur le mouvement du corps
dans l'espace. Cette rétine transmet 2 types d'informations: la vision focale ou fovéale qui
permet l'identification des objets et donne la direction du regard par rapport à la position de
la tête et la vision périphérique qui transmet les mouvements de l'environnement par
rapport à la rétine.
LE SYSTEME VESTIBULAIRE ET LABYRINTHIQUE
Ce système joue un rôle majeur dans la régulation posturale, il donne des informations
de mouvement quand le sujet est soumis à des accélérations angulaires qui stimulent les
cupules des canaux 1/2 circulaires ou des accélérations linéaires qui stimulent les macules
des organes otolithiques. Chaque canal possède sa propre orientation géométrique et est
sensible uniquement aux accélérations qui se font dans son propre plan. Les organes
otolithiques (saccule et utricule ) transmettent des informations sur la position de la tête
dans l'espace et sur l'accélération des déplacements.
 6
7
8
6
7
8
1
/
8
100%