Automatique et Régulation: Cours pour Techniciens Supérieurs
Telechargé par
Ahmed Ayach

Cours, Travaux dirigés et Travaux pratiques
A
A a iqu
u
ut
to
om
mat
tiqu
e
e
e
e
t
t
r
r
é
é
g
g
u
u
l
l
a
a
t
t
i
i
o
o
n
n
Cours, Travaux dirigés
et Travaux pratiques
Maher CHAABENE (Maître assistant GEII)
Mohamed DAMMAK (Assistant technologue GEII)
k
at
1K
)ap(
1
e
)!1K(
t
LP −
=
⎥
⎦
⎤
⎢
⎣
⎡
−
−
Maher CHAABENE (Maître assistant GEII)
Mohamed DAMMAK (Assistant technologue GEII)
Institut Supérieur des études technologiques de Sfax
x.b
dt
dx
b
dt
dx
b...
dt
dx
by
.a
dt
dy
a
dt
dy
a...
dt
dy
a01
2
2
2
m
m
m01
2
2
2
n
n
n++++=++++
)t(e.K)t(s
dt
)t(ds =+
τ
p.1
K
)p(E
)p(S
)p(H
τ
+
==
)t(ue1K)t(s
t
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛−= −
τ
).t(u.
t
exp.)t(.Ka)t(y ⎢
⎣
⎡⎜
⎝
⎛−+−=
ττ
⎥
⎦
⎤
⎟
⎠
⎞
τ
() ()
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎧
⇒
−=
+
=
+
−
+
+
=⇒
²w²
K
)H(jw)(Im
²w²1
K
)H(jw)(Re
².w1
jK
².w1
K
H(j.w)
+1
τ
1p
w
w0
2
z.2p
K
wp.w.z.2p
w.K
)p(E
)p(S
)p(H
0
222
2
0=
++
==
00 ++
(
)
2⎤.t.z1wsin.e.
z1
1
1K)t(s 0
tzw
2
0
⎥
⎥
⎦
⎢
⎢
⎣
⎡+−
−
−= −
ϕ
Pour le
technicien
supérieu
r
Cours, Travaux dirigés et Travaux pratiques
10
-3
10
-2
10
-1
10
0
10
1
-100
-80
-60
-40
-20
0
20
Pulsation W
G dB
-
3 dB
f1 10.f1
-40 d B/d c
wo
20.logK
e
z=2 1 z= z=0.7
z=0.5
z=0.1
10
-3
10
-2
10
-1
10
0
10
1
-200
-150
-100
-50
0Pulsation W
Dephasage
-90
-180
wo
z=2
z=1 z=0.7
z=0.5 z=0.1
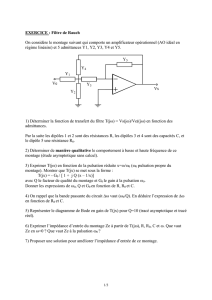
0100 200 300 400 500 600
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8 Step R sponse
Time (sec)
Amplitude
e
z=0.1
z=0.3
z=0.5 z=0. 7
z=1
z=2
A
A
u
u
t
t
o
o
m
m
a
a
t
t
i
i
q
q
u
u
e
e
et régu ation
et régulation
l

Plan du cours
Nomenclature
Chapitre 1 : Notion de systèmes lineaires asservis
1. Notion de systèmes.................................................................................................................2
1.1. Définition...........................................................................................................................2
1.2. Classification des systèmes.............................................................................................. 2
1.2.1. Les systèmes linéaires..............................................................................................2
1.2.2. Les systèmes invariants............................................................................................3
1.2.3. Les systèmes à modèle déterministe........................................................................3
1.2.4. Les systèmes asservis..............................................................................................3
1.3. Performances des systèmes asservis ..............................................................................5
1.3.1. Notion de stabilité......................................................................................................5
1.3.2. Notion de rapidité......................................................................................................5
1.3.3. Notion de précision ...................................................................................................6
2. Notion de signal.......................................................................................................................6
2.1. Définition...........................................................................................................................6
2.2. Signaux canoniques .........................................................................................................6
3. Réponses particulières d’un système scalaire..................................................................... 7
3.1. Réponse impulsionnelle....................................................................................................7
3.2. Réponse indicielle.............................................................................................................7
4. Réponse à un signal quelconque...........................................................................................7
Chapitre 2 : Les systèmes linéaires continus
1. Présentation...........................................................................................................................10
1.1. Définition.........................................................................................................................10
1.2. Principe de proportionnalité............................................................................................10
1.3. Principe d'additivité ou de superposition.........................................................................11
2. Mise en équation d’un système linéaire..............................................................................11
3. Transformée de Laplace .......................................................................................................12
3.1. Formulation mathématique.............................................................................................13
3.2. Propriétés et théorèmes .................................................................................................13
3.3. Table des transformées de Laplace................................................................................14
3.4. Exemple..........................................................................................................................17
4. Série de TD N°1...................................................................................................................... 19
Cours d’automatique et régulation - I -

Chapitre 3 : Représentation graphique des systèmes linéaires continus
1. Fonction de transfert.............................................................................................................21
2. Diagramme fonctionnel......................................................................................................... 22
2.1. Définition.........................................................................................................................22
2.2. Exemple de schéma bloc d’un système en boucle fermée.............................................22
2.3. Règles de simplification..................................................................................................22
2.3.1. Mise en série...........................................................................................................22
2.3.2. Mise en parallèle.....................................................................................................23
2.3.3. Structure en boucle fermée.....................................................................................23
2.3.4. Déplacement des nœuds d’informations................................................................. 24
2.3.5. Permutation de deux nœuds successifs.................................................................. 24
2.3.6. Déplacement de sommateurs .................................................................................24
2.3.7. Permutation de deux sommateurs successifs.........................................................25
2.4. Principales transmittances électriques et mécaniques ...................................................25
2.5. Applications....................................................................................................................26
2.5.1. Système électronique..............................................................................................26
2.5.2. Moteur à courant continu.........................................................................................28
3. Lieux de transfert................................................................................................................... 29
3.1. Introduction.....................................................................................................................29
3.2. Interprétation dans le plan complexe..............................................................................29
3.3. Les lieux de transfert...................................................................................................... 30
3.3.1. Lieu de Bode........................................................................................................... 30
3.3.2. Lieu de Nyquist .......................................................................................................30
3.3.3. Lieu de Black...........................................................................................................31
3.3.4. Abaque de Black.....................................................................................................31
4. Série de TD N°2...................................................................................................................... 32
Chapitre 4 : Etudes des systèmes élémentaires
1. Etude d'un système de premier ordre.................................................................................. 35
1.1. Etude temporelle.............................................................................................................35
1.1.1. Définition.................................................................................................................35
1.1.2. Réponse impulsionnelle.......................................................................................... 35
1.1.3. Réponse indicielle...................................................................................................36
1.1.4. Application............................................................................................................... 36
1.1.5. Relation temps–fréquence......................................................................................37
1.2. Etude harmonique ..........................................................................................................37
1.2.1. Représentation de Bode.......................................................................................... 38
1.2.2. Représentation deNyquist.......................................................................................39
1.2.3. Représentation de Black......................................................................................... 40
2. Etude d'un système de second ordre.................................................................................. 41
2.1. Définition.........................................................................................................................41
2.2. Etude temporelle.............................................................................................................42
2.2.1. Réponse impulsionnelle.......................................................................................... 42
2.2.2. Réponse indicielle...................................................................................................43
Cours d’automatique et régulation - II -

2.3. Etude harmonique ..........................................................................................................47
2.3.1. Diagrammes de Bode..............................................................................................47
2.3.2. Représentation dans le plan de Nyquist..................................................................50
2.3.3. Représentation dans le plan de Black.....................................................................50
2.3.4. Exemple..................................................................................................................51
3. Série de TD N°2...................................................................................................................... 52
Chapitre 5 : Performances des systèmes linéaires asservis
1. Introduction............................................................................................................................ 58
2. Stabilité................................................................................................................................... 58
2.1. Définition.........................................................................................................................58
2.2. Condition de stabilité ......................................................................................................58
2.2.1. Critère de Routh......................................................................................................59
2.2.2. Applications.............................................................................................................59
2.3. Critère de Nyquist...........................................................................................................60
2.3.1. Critère de Nyquist simplifié......................................................................................60
2.3.2. Marge de gain.........................................................................................................61
2.3.3. Marge de phase......................................................................................................61
2.4. Critère de Black.............................................................................................................. 62
2.4.1. Critère de Black.......................................................................................................62
2.4.2. Abaque de Black–Nichol’s.......................................................................................63
2.5. Critère de Bode.............................................................................................................64
2.5.1. Critère de Rivers.....................................................................................................64
2.5.2. Critère de Bode.......................................................................................................64
3. Précision ................................................................................................................................ 64
3.1. Définition.........................................................................................................................64
3.2. Classe d’un système.......................................................................................................65
4. Rapidité .................................................................................................................................. 66
4.1. Rappel et définition.........................................................................................................66
4.2. Critère de Naslin.............................................................................................................66
5. Série de TD N°3...................................................................................................................... 68
6. Série de TD N°4...................................................................................................................... 69
Chapitre 6 : Les régulateurs
1. Généralités............................................................................................................................. 72
1.1. Tâches du régulateur......................................................................................................72
1.2. Inventaire........................................................................................................................72
2. Rôles des régulateurs ou correcteurs................................................................................. 73
3. Réglage proportionnel ..........................................................................................................73
3.1. Principe...........................................................................................................................73
3.2. Statisme..........................................................................................................................73
3.3. Correcteur à action Proportionnelle................................................................................74
3.4. Correcteur à action Dérivée.............................................................................................74
3.5. Correcteur à action Intégrale...........................................................................................75
Cours d’automatique et régulation - III -

4. Types de correcteurs ............................................................................................................75
4.1. Correcteur à action Proportionnelle Dérivée................................................................... 75
4.2. Correcteur à action Proportionnelle Intégrale.................................................................75
4.3. Correcteur à action Proportionnelle Intégrale Dérivée....................................................76
5. Série de TD N°5...................................................................................................................... 77
Problèmes
1. Problème n°1.........................................................................................................................80
2. Problème n°2.........................................................................................................................80
3. Problème n°3.........................................................................................................................81
4. Problème n°4.........................................................................................................................81
5. Problème n°5.........................................................................................................................82
6. Problème n°6.........................................................................................................................82
7. Problème n°7.........................................................................................................................84
Travaux Pratiques
TP d'initiation : Equipement du laboratoire............................................................................. 87
TP1 : Étude d’un système de premier ordre............................................................................94
TP2 : Étude d’un système de second ordre .......................................................................... 101
TP3 : Simulation d’un système de premier et de second ordre........................................... 109
TP4 : Simulation de la régulation de vitesse d’un moteur .................................................. 114
Annexe
Bibliographie
Cours d’automatique et régulation - IV -
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
1
/
139
100%