CTN-258 : Statique et dynamique
3-1
Chapitre 3 ÉQUILIBRE DES CORPS
RIGIDES
3.1 Introduction
Dans ce chapitre, nous allons aborder l’étude de l’équilibre des corps rigides; plus
particulièrement, les réactions aux appuis.
3.2 Réactions aux appuis et liaisons pour une structure en 2D
Définition : Tout organe ou dispositif constructif qui solidarise d'une manière plus ou
moins complète une construction et un appui.
CLASSES DE LIAISONS
Liaisons géométriques
(ou idéales)
Liaisons déformables
(ou réelles)
Empêchent ou permettent quelques
mouvements sans dépense d'énergie
⇒ SE DÉFINISSENT :
1. Par les mouvements qu'elles
empêchent ⇒ butées
2. Par les mouvements qu'elles
permettent ⇒ degrés de liberté
Rendent possible certains mouvements
relatifs avec absorption ou dissipation
d'énergie ⇒ très complètes
HYPOTHÈSE : Nous supposerons que dans ce qui suit qu’il s’agit de liaisons aux
appuis ou extérieures (…au corps rigide) qui, si elles offrent des degrés de liberté, restent
contraintes à fonctionner dans le domaine des petits mouvements conformément à
l'hypothèse implicitement admise, "corps rigide
⇒
indéformable", en même temps que
le principe de transmissibilité.
Les liaisons intérieures (ou intermédiaires) sont des liaisons disposées entre deux parties
d'un même système.
Liaisons extérieures ou réactions en 2D :
La structure analysée et les forces appliquées sont contenues dans un même plan.
Les réactions d'appui seront aussi contenues dans le même plan.
3 types de supports ou liaisons (connexions)

Chapitre 3 : Équilibre des corps rigides
3-2
1. Appui simple ou à rouleau (liaison simple)
Tous ces appuis ou liaisons empêchent le corps de se mouvoir dans une direction
seulement. ⇒ Une butée et 2 degrés de liberté
Appuis sans frottement : la force de réaction est ⊥ aux surfaces de contacts et
doit pousser sur le corps
Câble d'appui : la force de réaction est dans la direction du câble et tire sur
le corps.
Autres appuis : la réaction peut avoir l'un ou l'autre sens.
(Barres d'assemblage ; manchon sans frottement (collar on frictionless rod), pivot
et glissière sans frottement (frictionless pin in slot))
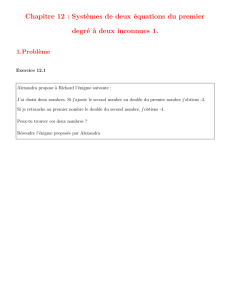
2. Appui articulé ou liaison double
Ces appuis ou liaison permettent les rotations autour de l'axe et empêche les
mouvements de translation. ⇒ Deux butées et 1 degré de liberté
Réaction résultante : Force de grandeur et de direction inconnues ou dont
les deux composantes rectangulaires sont inconnues (2 inconnues!)
Figure
3
.
1

CTN-258 : Statique et dynamique
3-3
M
F
1
F
2
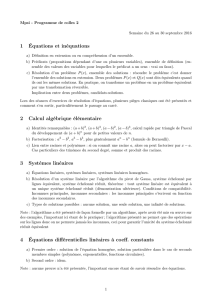
3. Un appui en encastrement :
Aucune translation, aucune rotation . ⇒ Zero degré de liberté
Réactions: Système force-couple (3 inconnues)
Définir un sens arbitraire pour les forces F
1
, F
2
et M
Si le résultat est négatif ⇒ le vecteur est dans l’autre sens
Si un corps est pourvu de liaisons géométriques, on le décrit par ses appuis. Dans le plan
on parle :
Appui à rouleau ⇒ liaison simple
Appui articulé ⇒ liaison double
Encastrement ⇒ liaison triple
Figure
3.2
Figure
3.3

Chapitre 3 : Équilibre des corps rigides
3-4
Exemple 3.1
Poutre sur appuis simple, poutre simple, celle qui est solidaire de ses appuis par
l'intermédiaire d'une liaison simple et d'une liaison double. Appuis indépendants et
disposés aux extrémités de la pièce
Poutre simplement appuyée
3.3 Équilibre d'un corps rigide dans le plan
Pour assurer l’équilibre d’un corps dans le plan xy on doit respecter 3 équations
d’équilibre :
0 0 0
x y A
F F M
= = =
∑ ∑ ∑
Permet ⇒ Résolution de 3 inconnues = souvent les réactions d'appui
La somme des moments peut être faite à n’importe quel
point sur la structure !
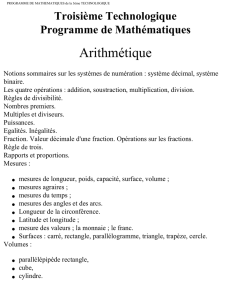
La figure 3.4 montre des systèmes isostatique, hyperstatique et fondamentalement
instable. Par contre, trois réactions aux appuis ne permettent pas toujours de déterminer
toutes les inconnues. Un exemple d’instabilité est donné à la figure 2.38.

CTN-258 : Statique et dynamique
3-5
Figure 3.4
ISOSTATICITÉ
La statique suffit pour déterminer les
réactions d'appuis.
Si r (réaction) = k (nbre d'équations
INDÉPENDANTES
)
(Note : dans le plan k = 3)
vs
HYPERSTATICITÉ
Lorsque les lois de la statique ne
permettent pas de calculer toutes les
réactions
Figure 3.5
Pour assurer la stabilité d'un corps rigide plan, il faut le munir d'au moins 3 liaisons non
concourantes équivalentes à une liaison triple.
La détermination statique d’un système est déterminée par l’équation suivante :
d = r – k Éq. 3.1
où d est le degré d’hyperstaticité.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%