Problèmes de Construction Mécanique : Transmission et Entraînement
Telechargé par
rdz8s4q5nb

1
CONSTRUCTION MECANIQUE

2
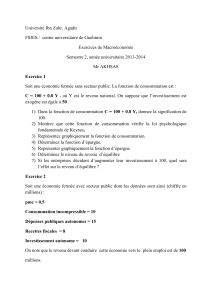
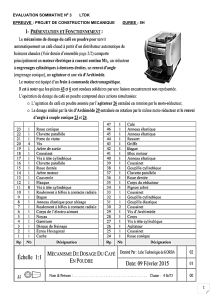
Probléme 1 :TRANSMISSION DE HORS BORD.
1 - Présentation du système
Transmission de la puissance motrice.
La puissance du moteur à explosion est transmise par l'intermédiaire de l'amortisseur de
vibrations (2), de l'arbre horizontal de commande (3) et du joint de cardan double(23). De ce
dernier, la force motrice est transmise au pignon de commande (35) qui est en prise constante
avec les pignons coniques (45)-(45’) de marche avant et de marche arrière. Ces derniers
pignons étant montés sur l'arbre vertical supérieur, peuvent tourner indépendamment de cet
arbre. Entre les pignons (45)-(45’) se trouve un accouplement à cônes qui permet le débrayage
et le changement du sens de rotation de l'arbre vertical inférieur (7). Cet arbre est relié à son
extrémité inférieure à l'arbre porte-hélice (104) par un couple de renvoi conique (85)-(103)
Zone d’étude
Figure 1

3
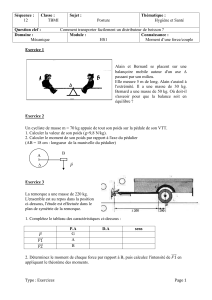
Zone d’étude
Figure2

4
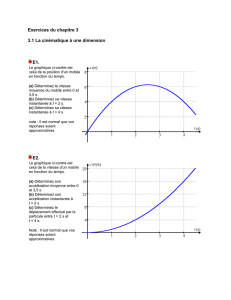
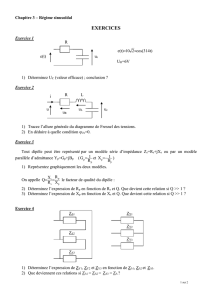
Figure 4 : schéma cinématique de l'entrainement d'hélice.
92
héli
ce
85
103
D
75
85
103
104
C
A
B
E
Guidage de l'arbre d'hélice
Figure 3

5
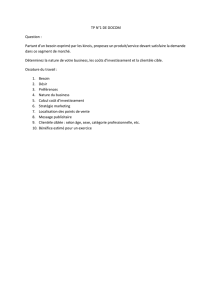
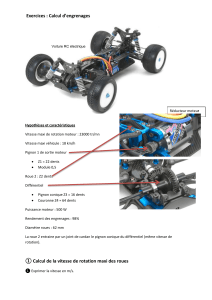
Figure 5 : schéma de calcul.
Figure pour le calcul des efforts. A reproduire sur la copie avec les actions mécaniques
représentées.
Sens de rotation de l'hélice 92 de Y vers Z
Données:
Puissance sur l'arbre d'hélice Ph = 49500 W
Vitesse de rotation de l'Hélice 92: Nh = 3450 tour/min
Diamètre moyen de la roue conique 103: D103 = 100mm D103 =2.BC
Nombre de dents du couple conique (85-103):
Z85 = 28 Z103 = 45 103= 58,11°
Rendement du couple conique(85-103) :c1 = 0,98
Rendement de l'inverseur conique :c2 = 0,98
En fonctionnement marche avant l'effort axial
E
F
créé par l'hélice est repris par le roulement
à deux rangées de billes :
E
F
= 9100
x
.
E
F
= 9100 N
X
C
D
A
Y
E
B
Z
a
b
c
a=80 mm b=60 mm c=120mm
103
92
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
1
/
94
100%