Modélisation et commande
d un système mécatronique
Organisation des modules pratiques
Objectifs
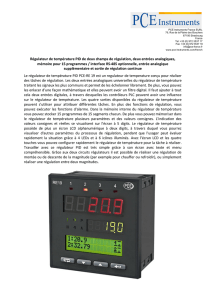
A la fin des travaux pratiques d automatique (TPs), l étudiant
maîtrisera le cycle analyse-synthèse-réalisation-validation
nécessaire à la mise en œuvre d’un algorithme de commande
numérique de type PID (fig. 1, voir pages 27-28 de [1]). Ces TPs
sont structurés en trois modules brièvement décrits ci-dessous.
Module 1 “Modélisation du système à commander”
L’objectif du premier module est l’établissement d’un modèle du
système à commander. Vu la relative simplicité de ce dernier, les
modèles de commande et de simulation sont les mêmes. Une
modélisation fondée sur un essai temporel est tout d’abord
effectuée. Une modélisation se basant sur un test fréquentiel est
ensuite menée. Les résultats des deux approches sont finalement
comparés afin de disposer d’un modèle fiable.
1
Version du 12/09/13, RL, CS
Fig. 1 Cycle analyse-synthèse-réalisation-validation.

Module 2 “Commande, synthèse par numérisation”
Le processus mécatronique est tout d’abord considéré en vitesse. Un régulateur analogique est synthétisé en imposant un
modèle à pousuivre. Le régulateur ainsi dimensionné est ensuite numérisé et directement implanté, sans phase d’analyse
avec le modèle identifé dans le premier module. L’analyse est menée directement sur le processus réel. Une démarche
similaire, par numérisation, est ensuite appliquée au processus étudié en position, mais en mettant à profit la première
méthode de Ziegler-Nichols et la “règle des deux”.
Module 3 “Commande en position, synthèse directe”
Le modèle du processus en position établi dans le premier module est ici exploité dans le cadre d’une synthèse par
calibrage de la boucle. L’analyse de l’algorithme de commande se fonde sur ce modèle avant de le réaliser et de le
valider sur le système réel.
Forme
Les TPs sont effectués par groupes de deux étudiants encadrés par un assistant. Les trois modules doivent être réalisés lors
de séances organisées toutes les quatre semaines.
Préparation
Avant chaque séance de TPs, chaque groupe propose un protocole d expérimentation pour le module à réaliser et en
discute avec son assistant lors d une heure de contact à fixer au préalable. Le protocole comporte au minimum les points
suivants : spécification et planification des étapes, et sélection des méthodes et outils à exploiter.
2

Expérimentation
Durant les séances de TPs, chaque assistant est à la disposition des ses groupes pour fournir l encadrement nécessaire. La
présence de l assistant a pour but principal de susciter et de soutenir la réflexion. Durant ces séances, les étudiants
doivent confronter et valider les résultats expérimentaux avec les éléments attendus et, le cas échéant, adapter les
méthodes et les outils à la lumière des divergences constatées.
Evaluation
Des questions écrites sur les modules pratiques sont intégrées à l examen écrit du cours Automatique II+TP. Elles
comptent pour un point. Par ailleurs, l un des quatre problèmes de l examen est directement lié aux TPs.
Documents
Dans le présent document, quelques suggestions non exhaustives apparaissent en italique entre parenthèses. Ces
recommandations doivent être dûment justifiées et approfondies. Il est souhaité que des solutions alternatives soient
explorées. Par ailleurs, les numéros des exemples se réfèrent au livre [1] servant de support au cours d automatique. Les
applications interactives du CD-ROM intégré dans [1], voire Matlab, se révèlent particulièrement utiles. Un guide
d utilisation succinct de ces applications fait l objet de l annexe III de [1]. Les plus utilisées (ex_9_8 et ex_9_12) sont
disponibles sur le site des TPs.
Référence
[1] LONGCHAMP R., Commande numérique de systèmes dynamiques - Cours d automatique: Volume1, Méthodes de
base, Presses Polytechniques et Universitaires Romandes, Lausanne, 2010.
3

Description du système à commander
Moteur à courant continu
et à excitation séparée
Couple résistant
Charge
Frottement
!
(t)
!
(t)
u(t)
Modélisation
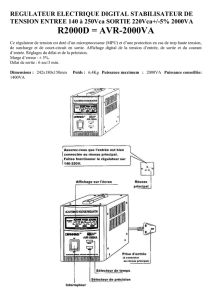
Le système mécatronique (fig. 2) exploré dans les modules pratiques est un entraînement électrique permettant d’asservir
la vitesse ou la position angulaire d’une charge par l’intermédiaire d’un moteur à courant continu et à excitation séparée.
Le moteur entraîne d’une part une charge inertielle via un réducteur et d’autre part une génératrice à courant continu
engendrant un couple résistant. Cette génératrice est connectée à un ensemble de quatre résistances commutables
permettant de varier le couple résistant. Le moteur est alimenté par un amplificateur qui fournit la puissance électrique au
moteur. Un disque rotatif de visualisation est également entraîné par le moteur au travers d’un réducteur. La position
angulaire [rad] de la charge est mesurée à l’aide d’un encodeur et sa vitesse angulaire [rad/s] est donnée par la
génératrice. Ces mesures sont par la suite dénotées [V] et [V], respectivement.
Fig. 2 Entraînement électrique.
L’équation différentielle liant la tension u(t) [V] à l’entrée du moteur et la mesure [V] de la vitesse angulaire s’écrit
(ex. 1.14 pages 24-27) :
!
(t)
!
(t)
y
!
(t)
y
!
(t)
y
!
(t)
!
dy
"
dt(t) + y
"
(t) =
#"
u(t)
!
: constante de temps
#"
: gain statique (1)
4

Commande a priori
Le système mécatronique réel renferme des non-linéarités, dues entre autres à des frottements secs. Afin de se placer dans
une plage de travail linéaire, il s agit d imposer un point de fonctionnement et d introduire de nouvelles variables
représentant les écarts des variables physiques par rapport à ce point de fonctionnement. Soit la tension
d alimentation provoquant la vitesse de rotation , fixant ainsi le point de fonctionnement souhaité. Si est donné, on
peut déterminer expérimentalement, directement sur le processus physique. Quand les non-linéarités ne sont pas trop
sévères, le modèle (1) reflète la réalité et le point de fonctionnement satisfait par définition le modèle :
Et comme la quantité est constante :
La tension s appelle commande a priori. Soient les écarts par rapport au point
de fonctionnement. En soustrayant (2) de (1), on trouve qu ils vérifient :
Il en résulte la fonction de transfert :
De même, l’équation différentielle liant la tension u(t) [V] à l’entrée du moteur et la mesure [V] de la position
angulaire est :
!
d2y
"
dt2(t) + dy
"
dt(t) =
#"
u(t)
!
: constante de temps
#"
: gain permanent
y
!
(t)
u
y
!
!
dy
"
dt+y
"
=
#"
u (2)
y
!
u
y
!
u =1
!"
y
"
!
u(t)=u(t)"u et
!
y
#
(t)=y
#
(t)"y
#
u
!
d
"
y
#
dt
+
"
y
#
=
$#"
u
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%