Étude des systèmes par équations d'état - Chapitre d'ingénierie
Telechargé par
Lachance Awounang12

Chapitre 3
´
Etude des syst `
emes par ´
equations d’ ´
etat
Jusqu’`
a pr´
esent, on a mod´
elis´
e le comportement des syst`
emes `
a l’aide de fonctions de
transfert, en utilisant la transform´
ee de Laplace.
Principalement, le d´
esavantage de cette m´
ethode est qu’elle n’est valide que pour des
syst`
emes lin´
eaires invariables. Un avantage majeur, par contre, est que ces fonctions de
transfert donnent rapidement de l’information sur la stabilit´
e et la r´
eponse transitoire.
Avec le d´
eveloppement de syst`
emes plus complexes, les approximations de syst`
emes
lin´
eaires ne sont plus valides. Il faut une m´
ethode plus robuste pour faire l’analyse. On
doit aussi avoir une m´
ethode qui peut facilement analyser plusieurs entr´
ees et plusieurs
sorties.
4.1 D ´
efinition
On va d´
emontrer, `
a l’aide d’un exemple de circuit ´
electrique, que pour un syst`
eme `
a
plusieurs variables, des ´
equations diff´
erentielles ne sont n´
ecessaires que pour r´
esoudre un
sous-ensemble des variables du syst`
eme.
Les autres variables peuvent alors ˆ
etre calcul´
ee `
a partir de ce sous-ensemble.
On a donc la proc´
edure suivante :
1. Choisir un sous-ensemble de toutes les variables possibles du syst`
eme. On appelle
ce sous-ensemble les variables d’´
etat.
2. Pour un syst`
eme d’ordre n, on ´
ecrit n´
equations diff´
erentielles de premier ordre. On
appelle ce groupe d’´
equations les ´
equations d’´
etat.
1

´
ETUDE DES SYST `
EMES PAR ´
EQUATIONS D’ ´
ETAT
3. Si on connaˆ
ıt les conditions initiales de toutes les variables d’´
etat `
at0, et l’entr´
ee du
syst`
eme pour t≥t0, on peut solutionner les ´
equations d’´
etat.
4. On combine les variables d’´
etat avec l’entr´
ee au syst`
eme pour trouver toutes les autre
variables.
5. Les ´
equations d’´
etat et les ´
equations de sortie forment une repr´
esentation valide du
syst`
eme. On appelle cette repr´
esentation l’espace d’´
etat (”state-space”).
Exemple 1
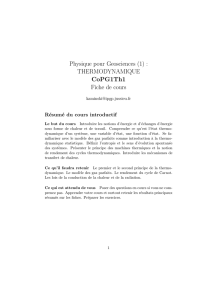
Soit le circuit suivant :
+
−
v(t)
R
L
Figure 10.1 – Circuit RL
Le courant initial est i(0). Analyser le circuit.
1. On choisit le courant i(t) comme variable `
a trouver.
2. L’´
equation est :
Ldi
dt +Ri =v(t) (10.1)
3. On prend la transform´
ee de Laplace :
L[sI(s)−i(0)] + RI(s) = V(s) (10.2)
Si l’entr´
ee est un ´
echelon unitaire, V(s)=1/s, et on isole pour I(s) :
I(s) = 1
R
1
s−1
s+R
L
+i(0)
s+R
L
(10.3)
et donc
i(t) = 1
R1−e−(R/L)t+i(0)e−(R/L)t(10.4)
⇒i(t) est un sous-ensemble de toutes les variables possibles du circuit, et donc si on
connaˆ
ıt i(0) et v(t), on peut trouver les autres variables. i(t) est une variable d’´
etat, et
l’´
equation 10.1 est une ´
equation d’´
etat.
2

´
ETUDE DES SYST `
EMES PAR ´
EQUATIONS D’ ´
ETAT
4. On peut trouver le reste des variables en fonction de i(t) et v(t). Soit :
vR(t) = Ri(t)
vL(t) = v(t)−vR(t) = v(t)−Ri(t)
di
dt =1
L[v(t)−Ri(t)]
´
Equations de sortie (10.5)
L’´
equation 10.1 et les ´
equations de sortie forment l’espace d’´
etat.
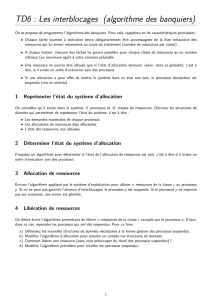
Exemple 2
Soit le circuit suivant :
+
−
v(t)
RL
C
i(t)
Figure 10.2 – Circuit RLC
Le courant initial est i(0). Analyser le circuit.
1. Le syst`
eme est de deuxi`
eme ordre : il faut 2 ´
equations diff´
erentielles pour trouver
les deux variables d’´
etat. On choisit i(t) et q(t), la charge au condensateur.
2. Les ´
equations sont :
Ldi
dt +Ri +1
CZidt =v(t) (10.6)
ou, puisque i(t) = dq(t)
dt ,
Ld2q(t)
dt2+Rdq(t)
dt +1
Cq(t) = v(t) (10.7)
On peut convertir l’´
equation 10.7 en deux ´
equations diff´
erentielles de premier ordre
en fonction de i(t) et q(t) :
dq
dt =i(10.8)
di
dt =−1
LC q−R
Li+1
Lv(t) (10.9)
3

´
ETUDE DES SYST `
EMES PAR ´
EQUATIONS D’ ´
ETAT
3. On peut r´
esoudre ces ´
equations en utilisant la transform´
ee de Laplace, si on connaˆ
ıt
les conditions initiales et l’entr´
ee.
4. Avec i(t) et q(t), on peut trouver toutes les autre variables. Par exemple,
vL(t) = −1
Cq(t)−Ri(t) + v(t) (10.10)
L’´
equation vL(t) est une ´
equation de sortie, et est une combinaison lin´
eaire des variables
d’´
etat.
On aurait aussi pu choisir vR(t) et vC(t) comme variables d’´
etat.
Y a-t-il des restrictions quand au choix des variables d’´
etat ?
→Oui. Aucune variable d’´
etat ne peut ˆ
etre une combinaison lin´
eaire des autres va-
riables d’´
etat. Ex : Si vR(t) est choisie comme variable d’´
etat, on ne peut pas choisir iR(t),
puisque vR(t) = Rir(t).
On peut ´
ecrire les ´
equations d’´
etat et de sortie sous forme matricielle.
˙
x=Ax +Bu(´
equation d’´
etat) (10.11)
o`
u
˙
x=
dq
dt
di
dt
A="0 1
−1
LC −R
L#x="q
i#B="0
1
L#u=v(t) (10.12)
et
y=Cx +Du(´
equation de sortie) (10.13)
o`
u
y=vL(t)C="−1
C
−R#T
x="q
i#D=h1iu=v(t) (10.14)
Les ´
equations 10.11 et 10.13 forment l’espace d’´
etat.
4.2 Application de la m ´
ethode
Pour repr´
esenter un syst`
eme par des ´
equations d’´
etat, il faut savoir :
1. Le nombre minimum de variables d’´
etat n´
ecessaire.
2. Les variables d’´
etat doivent ˆ
etre lin´
eairement ind´
ependantes.
4

´
ETUDE DES SYST `
EMES PAR ´
EQUATIONS D’ ´
ETAT
Nombre minimum de variables d’´
etat
Typiquement, le nombre minimum est l’ordre de l’´
equation diff´
erentielle qui d´
ecrit le
syst`
eme. Du point de vue d’une fonction de transfert, c’est l’ordre du d´
enominateur. On
peut aussi compter le nombre d’´
el´
ements ind´
ependants qui emmagasinent de l’´
energie.
Lin´
eairement ind´
ependantes
Il ne faut pas qu’une variable d’´
etat soit une combinaison lin´
eaire de d’autre variables
d’´
etat. Ex : Si on choisit 3 variables x1,x2et x3, mais si x3= 2x1+ 5x2, alors x3n’est pas
ind´
ependante de x1et x2, puisque si on connaˆ
ıt la valeur de x1et x2, on peut trouver x3.
Par contre, si x3= 5dx1
dt ,x3est alors lin´
eairement ind´
ependante.
4.3 Conversion de fonction de transfert `
a espace d’ ´
etat
Une m´
ethode pour convertir une fonction de transfert `
a un espace d’´
etat : la m´
ethode
des variables de phase.
Soit une ´
equation diff´
erentielle :
sn+an−1sn−1+···+a1s+a0=b0u(10.15)
ou, sous forme diff´
erentielle,
dny
dtn+an−1
dn−1y
dtn−1+···+a1
dy
dt +a0=b0u(10.16)
On choisit la sortie y(t) et les (n−1) d´
eriv´
ees comme variables d’´
etat. Donc :
x1=y
x2=dy
dt
.
.
.
xn=dn−1y
dtn−1
(10.17)
5
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%