TD de syst`emes asservis n◦11
Ce TD est not´e, `a r´ediger en ´equipe de 4 ±1
et `a rendre pour le 9 d´ecembre
23 Novembre 2005
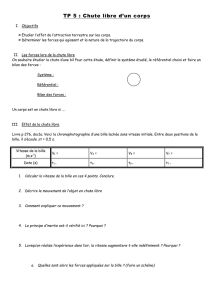
On consid`ere le mˆeme syst`eme qu’au TD 9, constitu´e d’une bille en roule-
ment sur deux rails dont on peut modifier l’inclinaison par l’interm´ediaire
d’un ensemble moteur/r´educteur. On souhaite stabiliser la position de la
bille `a une position de consigne souhait´ee.
Figure 1: la bille roule sur un rail inclin´e par un moteur
1 Hypoth`eses et donn´ees
•On mod´elise la fonction de transfert qui lie vitesse de rotation du
moteur `a la tension appliqu´ee `a ce moteur par une transmittance du
1er ordre de gain Kmet de constante de temps τm.
•Le r´educteur a pour rapport de r´eduction r.
•On mod´elise la dynamique de l’´evolution de l’abscisse de bille par
rapport `a la position angulaire par un double int´egrateur de gain Kb.
•On ne tiendra pas compte dans ce sujet des 2 capteurs de position
d´elivrant les tensions images des positions angulaire de la barre et
lin´eaire de la bille.
1

•On prendra
Km= 500tr.mn−1.V −1τm= 60ms
r= 1/300 Kb= 0,2m.rad−1
2 Repr´esentation d’´etat du syst`eme
1. A partir des fonctions de transfert, donner une repr´esentation d’´etat du
syst`eme en utilisant les variables physiques. On choisira dans l’ordre
: position de la bille, sa vitesse, angle du rail, sa vitesse angulaire. La
sortie du syst`eme est la position de la bille.
2. La repr´esentation d’´etat trouv´ee pr´ec´edemment est presque sous forme
compagne (variables de phase). Proposer un changement de variable
simple pour avoir une repr´esentation d’´etat sous forme compagne.
3 Commande par retour d’´etat
1. Lors du TD9, un double retour a ´et´e mis en place : un asservissement
sur l’angle d’une part et un asservissement de la position de la bille
d’autre part. Ce dernier asservissement ne pouvait ˆetre stable si l’on
ne mettait qu’un correcteur proportionnel. Il correspond `a un retour
sur deux variables d’´etat. Lesquelles ?
2. Maintenant qu’on a une repr´esentation d’´etat avec des variables de
phase, il est possible de choisir la fonction de transfert que l’on souhaite
obtenir en BF. Calculer le correcteur pour avoir l’´equivalent d’un
syst`eme avec deux pˆoles r´eels (constantes de temps de 1s) et un second
ordre d’amortissement 0,7 et de pulsation naturelle ωn= 0,2 c’est `a
dire
H(p) = numerateur
(1 + p)(1 + p)(1 + 2z
ωnp+p2
ω2
n
)
3. Ajouter un gain appropri´e pour que le gain de la BF soit de 1.
4. R´ealiser sur Simulink une comparaison entre le correcteur du TD9 et
celui qui vient d’ˆetre calcul´e. On pourra s’int´eresser `a la commande
envoy´ee au moteur.
2
1
/
2
100%