s2i.pinault-bigeard.com
Lycée Richelieu - Rueil-Malmaison Page 1 / 15
CPGE TSI - Sciences de l’Ingénieur TSI2
Théorie des mécanismes Cours
Réf. Programme: S411 - Solide indéformable, lois de mouvement
Compétences visées: A3-03, B2-05, B2-07, C2-13 v1.1
Lycée Richelieu – 64, rue George Sand – 92500 Rueil-Malmaison - Académie de Versailles
Compétences visées :
A3-03 Identifier les architectures fonctionnelles et structurelles
B2-05 Déterminer la liaison cinématiquement équivalente à un ensemble de liaisons
B2-07 Réaliser le graphe de structure de tout ou partie d’un mécanisme
C2-13 Déterminer le degré de mobilité et d’hyperstatisme

s2i.pinault-bigeard.com
Lycée Richelieu - Rueil-Malmaison Page 2 / 15
CPGE TSI2 - S2I Théorie des mécanismes Cours
Sommaire
1 Introduction 4
2 Rappel 4
2.1 Les différents types de schémas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Leschémadeprincipe ................................ 4
2.1.2 Le schéma technologique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.3 Le schéma architectural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.4 Le schéma cinématique minimal . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Chaînesdesolides ...................................... 5
2.2.1 Chaîneouverte .................................... 5
2.2.2 Chaînefermée..................................... 5
2.2.3 Chaînecomplexe ................................... 6
2.3 Liaisonéquivalente...................................... 6
2.3.1 Liaisonensérie.................................... 6
2.3.2 Liaisonenparallèle.................................. 7
2.3.3 Composition de chaînes séries et parallèles . . . . . . . . . . . . . . . . . . . . . 8
3 Modélisation et structure d’une chaine fermée de solide 9
3.1 Objectif ............................................ 9
3.2 Le nombre cyclomatique γ.................................. 9
4 Approche cinématique de la théorie des mécanismes 10
4.1 Nombre d’équations cinématiques Ec............................ 10
4.2 Nombre d’inconnues cinématiques Ic............................ 10
4.3 Mobilité d’un mécanisme m................................. 10
4.3.1 Signification mathématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.3.2 Signification mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.4 Degré d’hyperstatisme h................................... 11
5 Approche statique de la théorie des mécanismes 11

s2i.pinault-bigeard.com
Lycée Richelieu - Rueil-Malmaison Page 3 / 15
CPGE TSI2 - S2I Théorie des mécanismes Cours
5.1 Nombre d’équations statiques Es.............................. 12
5.2 Nombre d’inconnues statiques Is.............................. 12
5.3 Degré d’hyperstatisme h................................... 12
5.4 Mobilité d’un mécanisme m................................. 13
6 Mise en évidence géométrique de l’hyperstatisme 14
6.1 Tolérancement géométrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6.2 Rendre l’assemblage isostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7 Ce qu’il faut (au minimum) retenir 15
7.1 Récapitulatif ......................................... 15
7.2 Quelle approche privilégier ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15

s2i.pinault-bigeard.com
Lycée Richelieu - Rueil-Malmaison Page 4 / 15
CPGE TSI2 - S2I Théorie des mécanismes Cours
1 Introduction
La théorie des mécanismes s’appuie sur l’étude des chaînes fermées de solides et a pour buts :
• l’analyse de la structure d’un mécanisme, afin d’émettre un avis sur la pertinence des solutions
adoptées pour remplir la fonction mécanique souhaitée.
• la détermination de la(les) loi(s) entrée-sortie.
• l’analyse de la transmission d’énergie en vue du dimensionnement des organes mécaniques.
L’analyse des chaines fermées de solides est orientée dans ce cours vers la recherche, d’une part, de
caractéristiques telles que l’iso ou l’hyperstatisme (ou hyperstaticité) et, d’autre part, la recherche
de solution technologique qui permettent de maitriser ou modifier l’hyperstatisme.
2 Rappel
2.1 Les différents types de schémas
2.1.1 Le schéma de principe
Ce mode de représentation décrit les données strictement
nécessaires à la définition du principe de fonctionnement
d’une solution.
2.1.2 Le schéma technologique
Le schéma technologique vise à une description de la na-
ture et de l’agencement des principaux composants d’un pro-
duit.
2.1.3 Le schéma architectural
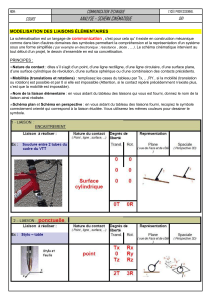
Il met en évidence la nature et les positions relatives des
différentes liaisons élémentaires. Contrairement au schéma
technologique, les pièces sans mouvement relatif ne sont pas
distinguées les unes des autres.
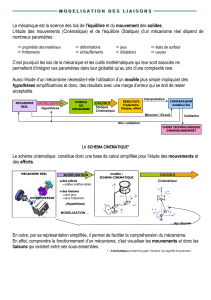
2.1.4 Le schéma cinématique minimal
Ce mode de représentation met en évidence les mouve-
ments relatifs entre sous-ensembles cinématiques.
A la différence du schéma architectural, on ne s’intéresse
pas à la réalisation des liaisons mais uniquement aux mobilités.

s2i.pinault-bigeard.com
Lycée Richelieu - Rueil-Malmaison Page 5 / 15
CPGE TSI2 - S2I Théorie des mécanismes Cours
Il fait l’objet de la norme NF EN 23-952.
2.2 Chaînes de solides
2.2.1 Chaîne ouverte
Une chaîne de solides S1,S2,S3, . . ., Snest dite ouverte si les solides placés à l’extrémité sont
différents.
S1→S2→S3→. . . . . . →Sn
Exemple : Robot Ericc 3
Poignet 4
Main 5
Avant-bras 3
Bras 2
Épaule 1
Socle 0
0
1
2
3 4
5
L0/1
L1/2
L2/3
L3/4L4/5
2.2.2 Chaîne fermée
Une chaîne de solides S1,S2,S3, . . ., Snest dite fermée si le solide initial est le même que le solide
final.
S1→S2→S3→. . . . . . →Sn→S1
Exemple : Bras Maxpid
0 4
3
2
1
L0/1
L1/2L2/3
L3/4
L4/0
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%