Examen Automatique 2 - Représentation d'état et Retour d'état
Telechargé par
Amine Elgharmali

1
ENSA–Tétouan
2éme année Cycle Ingénieur
GM
Automatique 2
Année universitaire 19/20
Prof : A. HADDI
Contrôle durée 1h30min
Exercice 1 :
On considère le système à une entrée, une sortie et d’ordre n associé à la représentation d’état
suivante :
)()(
)()()(
.
tCxty
tButAxtx
1) Quelles sont les dimensions des matrices A, B et C ?
2) Quel nom donne-t-on à la matrice A, B et C ?
3) Que représentent les valeurs propres de la matrice A ?
4) Que doit satisfaire A pour que le système soit stable ?
5) Donner l’expression de la fonction de transfert du système en fonction de A, B et C.
6) Donner la condition portant sur A et B pour que le système soit commandable.
7) Ecrire l’expression générale de la commande par retour d’état et donner une représentation
schématique du coupe système retour d’état.
8) Donner la condition portant sur A et C pour que le système soit observable.
Exercice 2 : Régulation de vitesse par retour d’état :
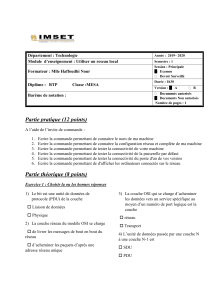
La rotation d’un moteur à courant continu résulte de l’action d’un champ magnétique créé par le
circuit inducteur et le passage d’un courant dans le circuit induit. La variation de vitesse peut donc se faire
par action sur la tension d’induit u(t). (voir figure 1)
On note J, le moment d’inertie de la partie tournante, f le coefficient de frottement visqueux et Cm
le couple développé par le moteur, (Cm(t) = K.I(t) et e(t) = K.(t)).
On traitera l’exercice avec les valeurs numériques suivantes : R = 1, L = 1 H, f = 4Nms/rd J =
0.4Nms²/rd et K = 2 vs/rd.
I- Mise en équation :
1. Ecrire les équations électromagnétiques régissant le système.
2. Déterminer la fonction de transfert : (p)/U(p).
3. En prenant comme variables d’état
)()(et x )()( 21 tItttx
et comme sortie la tension
délivrée par la génératrice tachymétrique (Kg.). Ecrire les équations d’état sous la forme :
)t(Du)t(Cx)t(y
)t(Bu)t(Ax)t(x
.
.
4. Retrouver la fonction de transfert calculée en 2.
II- Retour d’état :
On traitera la suite de l’exercice avec les données suivantes :
0Det 0.2 0C ,
1
0
B ,
1- 2-
5 10-
A
.
1. Le système ainsi représenté est-il commandable et observable ? Justifier.
2. Nous supposons que les deux composantes du vecteur d’état sont mesurées et nous adoptons la
loi de commande :
)t(Kx)t(v)t(u
.

2
a- Ecrire les équations d’état sous la forme :
C'.x(t)y(t) );t(v'.B)t(x'.A)t(x
.
.
b- Les pôles désirés en boucle fermée sont
.5pet 221 p
Calculer le polynôme
caractéristique à partir de ces pôles.
c- Calculer le polynôme caractéristique à partir de A’.
d- En déduire le gain de retour
21 K KK
.
I(t)
R L
u(t) Charge
cte
e(t)
GT
Kg.
Figure 1
Exercice 3 :
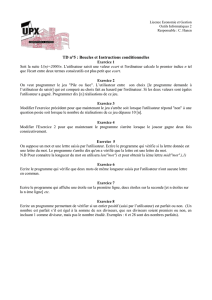
Soit le système d´écrit par le schéma de la figure 2.
On prend comme vecteur d’état, le vecteur 𝑋 = [𝑥1 𝑥2 𝑥3 𝑥4 ]𝑇 suivant:
Figure 2 : Schéma fonctionnel du système
1) Ecrire la représentation d’état de ce système.
2) Etudier la commandabilité et l’observabilité en utilisant les matrices de commandabilité et
d’observabilité.
3) A partir du schéma fonctionnel de la figure 2, déterminer la fonction de transfert du système.
4) En effectuant un changement de variables d’état, déterminer la représentation d’état du système sous
forme modale.
Bon courage
1
/
2
100%