Examen Blanc Robotique : Inertie, Moment Cinétique et Dynamique
Telechargé par
hamza brijou

ENSAM-R 2API
1/3
Exam blanc
2022-23
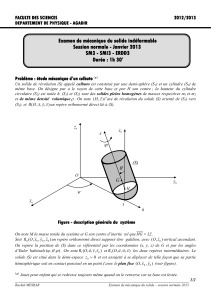
Exercice : z
Soit un corps S composé de: S1 S2
h
*) une surface rectangulaire S1 de masse m1, de hauteur h
et de largeur 2R suivant l’axe x.
*) une autre surface rectangulaire S2 de masse m2, de hauteur h
et de largeur R, suivant y. O S3 y
*) un point matériel S3 de masse m3. α
x u
1) Déterminer la matrice d'inertie de S en O (D)
Préciser les produits d’inerties qui sont nuls du corps S
2) Déterminer le moment d'inertie de S par rapport à la droite (D)
Problème : Etude du ROBOT ROBY
Le système représente le robot ROBY qui effectue les tâches de ponçage, de peinture
et d’autres tâches d’entretien. On distingue 2 phases du fonctionnement du robot,
Phase de déploiement pour la préparation de l’environnement de travail et la phase
de travail.
On considère que le manipulateur est en cours de déploiement, tel que le chariot et la
plate-forme élévatrice sont à l’arrêt. Tenant compte des constituants du manipulateur,
On adopte le schéma cinématique simplifié de la figure 2 page 3 en considérant que le
ROBOT ROBY est constitué des solides indéformables suivants :
(S1)={Chariot} ; (S2) ={Embase + Plate-forme élévatrice} ;
(S3)={Colonne de rotation + Epaule } ;
(S4) ={Bras + Poignet + Outil de travail}.
Données et Paramétrage :
Sol
(S0)
Supposé parfaitement horizontal, repère lié
0 0 0 0 0
R (O ,x ,y ,z )
supposé Galiléen, L’accélération
de pesanteur est
0
gzg
.
(S1)
Fixe par rapport au sol (S0),Li(S1/S0):ponctuelle
avec frottement de normale
i0
(I ,z )
(i=1,2,3)
10
IO
,
1 1 0 1 0
2
I I c x d y
,
1 1 0 1 0
3
I I c x d y
,
(c1 , d1 constantes),
u
vecteur unitaire orientant la
droite (I1I3),
00
(x ,u)
avec α0 angle constant.
Masse m1 ,centre d’inertie G1 tel que
1 1 0 1 0
1
I G a x b z
(a1 , b1 constantes)
(S2)
Fixe par rapport au chariot (S1).
L(S2/S1) : glissière bloquée,
1 1 0 1 0
2
I O L x z z
(L1 , z1 constantes).
Masse m2 ,centre d’inertie G2 tel que
2 2 0 2 0
2
O G a x b z
(a2 , b2 constantes)

ENSAM-R 2API
2/3
(S3)
L(S3/S2) : pivot parfaite d’axe
30
(O ,z )
,
repère lié
3 3 3 3 0
R (O ,x ,y ,z )
,
0 3 0 3
(x ,x ) (y ,y )
2 2 0 2 0
3
O O c x d z
(c2 , d2 constantes)
Masse m3 ,centre d’inertie G3 tel que
3 3 3
3
O G L x
(L3 constante), matrice d’inertie
3 3 3
O3 3 3 3 3
3 3 3 3 3 0
A F E
I (S ) F B D
E D C (x ,y ,z )
(S4)
L(S4/S3) : pivot 2 parfait d’axe
3
(A , y )
,
repère lié
4 4 3 4
R (A ,x y ,z )
,
3 4 0 4
(x ,x ) (z ,z )
3 3 3
O A a x
(a3 constante)
Masse m4 , centre d’inertie G4 tel que
444
AG L x
(L4constante) , matrice d’inertie
4
44
44 3 4
A
A 0 0
I (S ) 0 B 0
0 0 C (x ,y ,z )
Un moteur (M23) est monté entre (S2) et (S3), (M23) applique sur (S3) une action mécanique
représentée par un torseur couple de moment
m23 0
Cz
.Un moteur (M34) monté entre (S3) et (S4),
applique sur (S4) une action mécanique représentée par un torseur couple de moment
m34 3
Cy
.
Les données de masse et d’inertie de (M23) sont inclues dans ceux des solides (S2) et (S3) de même
pour (M34) dans ceux des solides (S 3) et (S4).
Question 1 :
a) Sachant que
3 3 0
(O ,x ,z )
est un plan de symétrie matérielle du solide (S3),
simplifier la forme de sa matrice d’inertie
O3 3
I (S )
.
b) Déterminer le moment cinétique au point O3 du solide (S3) dans son mouvement
par rapport à (S0) :
c) Déterminer le moment cinétique au point A du solide (S4) dans son mouvement
par rapport à (S0) :
σ40
(
AS /S )
Question 2 :
d) Déterminer le moment dynamique au point A du solide (S4) dans son mouvement
par rapport à (S0) en projection sur l’axe y3 :
e) Déterminer les moments des efforts appliques sur S4 au point A du solide (S4) en
projection sur y3 :
Question 3 :
f) Déterminer le moment dynamique au point O3 des solides (S3+S4) dans le
mouvement par rapport à (S0) en projection sur l’axe zo.
Question 4 :
g) Appliquer le théorème du moment dynamique à (S3+S4) sur l’axe zo.
Question 5 :
h) Déterminer l’énergie cinétique de S2+S3+S4 par rapport à (S0)
Le corps S4 est représenté par la géométrie de la figure 3:
Un tube cylindrique S41 d’axe de révolution y4 = y3, de rayon intérieur Ri, de rayon
extérieur Re, de hauteur H, de masse m41, de centre d’inertie G41 = A.

ENSAM-R 2API
3/3
Un parallélépipède S42, de hauteur aussi H suivant l’axe y4, de longueur L, suivant l’axe
x4, de largeur d, suivant l’axe z4, de masse m42, de centre d’inertie G42.
Question 6 :
h) Déterminer La position du centre d’inertie G4 du corps S4.
i) Déterminer la matrice d’inertie du corps S4 en A.
Figure 3
Figure 2
I1=O
0
I3
I2
d1
d1
O
2
O
3
A
G
3
G
4
α0
(S1)
(S2)
(S3)
(S4)
Sol(S0)
G1
G
2
S1
S0
S2
Pivot
L1 : Ponctuelle
S3
S4
Pivot
Glissière
bloquée
L2 : Ponctuelle
L3 : Ponctuelle
M3
M2
Pesanteu
r
x4
A
1
/
3
100%