Observer-Based Control of Fractional-Order Uncertain Systems
Telechargé par
Charif Charif

Automatica 59 (2015) 216–223
Contents lists available at ScienceDirect
Automatica
journal homepage: www.elsevier.com/locate/automatica
Brief paper
New sufficient conditions for observer-based control of
fractional-order uncertain systems✩
Salim Ibrir a,Maamar Bettayeb b,c
aKing Fahd University of Petroleum and Minerals, Electrical Engineering Department, Dhahran, Saudi Arabia
bUniversity of Sharjah, Department of Electrical and Computer Engineering, University City, Sharjah, United Arab Emirates
cKing Abdulaziz University, Jeddah, Saudi Arabia
article info
Article history:
Received 19 January 2014
Received in revised form
24 January 2015
Accepted 21 May 2015
Keywords:
Fractional-order systems
Observer-based control
Convex-optimizations
Linear Matrix Inequalities (LMIs)
abstract
New simple linear matrix inequalities are proposed to ensure the stability of a class of uncertain fractional-
order linear systems by means of a fractional-order deterministic observer. It is shown that the conditions
of existence of an observer-based feedback can be split into a set of linear matrix inequalities that are
numerically tractable. The presented results show that it is possible to decouple the conditions containing
the bilinear variables into separate conditions without imposing equality constraints or considering an
iterative search of the controller and the observer gains. Simulations results are given to approve the
efficiency and the straightforwardness of the proposed design.
©2015 Elsevier Ltd. All rights reserved.
1. Introduction
Fractional-order calculus has a long history and its serves as
a modern powerful tool in analyzing various physical phenom-
ena. The interest in understanding systems governed by fractional-
order differential equations has grown up during the last decades
and many associated results have been appeared, see e.g., Farges,
Moze, and Sabatier (2010), Manabe (1960), Matignon (1996),
Oustaloup (1983,1995) and Trigeassou, Maamri, Sabatier, and
Oustaloup (2011). It was found that diffusion processes and biolog-
ical systems can be modeled in terms of fractional-order differen-
tial equations, see e.g., Oustaloup (2014) and Sabatier, Agrawal, and
Machado (2007). Additionally, the use of fractional-order deriva-
tives and integrals in feedback design has been successful to a large
extent in improving the robustness of the closed-loop systems.
Nevertheless, fractional differential equations have not yet re-
ceived the same attention as ordinary differential equations in the
investigation of their stability, simulation, and analysis. Owing to
the lack of effective analytic methods for the time-domain anal-
ysis and simulation of linear feedback fractional-order systems,
✩The material in this paper was partially presented at the 19th IFAC World
Congress Conference, August 24–29, 2014, Cape Town, South Africa. This paper
was recommended for publication in revised form by Associate Editor Akira Kojima
under the direction of Editor Ian R. Petersen.
E-mail addresses: [email protected] (S. Ibrir), [email protected]
(M. Bettayeb).
a numerical simulation scheme is developed in Hwang, Leu, and
Tsay (2002). Exact calculation of fractional-order derivatives of
some particular polynomial signals is discussed in Samadi, Ahmad,
and Swamy (2004). Stability of dynamical systems, represented
by fractional order derivatives, has been investigated using the
Routh–Hurwitz criteria, the pole placement method, and Lyapunov
strategies. For linear fractional-order systems, it was found that the
stability is equivalent to the repartition of the system poles in a re-
stricted area of the complex plane. Based on this key formulation
of stability and the use of convex-optimization algorithms, stated
as linear-matrix-inequality conditions, numerous sufficient condi-
tions have been proposed to ensure robust stability of some classes
of fractional-order type systems, see e.g., Ahn and Chen (2008),
Farges et al. (2010) and Sabatier, Moze, and Farges (2010). A consid-
erable interest has been also devoted to stability and stabilizability
of special classes of fractional-order systems, see e.g., Li, Chen, and
Podlubny (2010) and Wen, Wu, and Lu (2008). A new Lyapunov
stability analysis of fractional differential equations is discussed
in Trigeassou et al. (2011). The problem of pseudo-state feedback
stabilization of fractional-order systems using LMI setting was ad-
dressed in Farges et al. (2010).
In the recent paper (Lan, Huang, & Zhou, 2012), the authors have
presented a numerical scheme for stabilization of uncertain com-
mensurate (1< α < 2)fractional-order systems by means of
dynamic output feedback. In Lan and Zhou (2013), observer-
based control of a class of uncertain fractional-order systems
0< α < 1 is studied using convex-optimization tools. Other
http://dx.doi.org/10.1016/j.automatica.2015.06.002
0005-1098/©2015 Elsevier Ltd. All rights reserved.

S. Ibrir, M. Bettayeb / Automatica 59 (2015) 216–223 217
recent works on stabilization of triangular fractional-order systems
can be traced in Zhang, Liu, Feng, and Wang (2013) and references
therein. In this paper, we devote our attention to the control of
commensurate fractional-order-pseudo-state systems subject to
bounded uncertainties and partially-state measurements where
the non integer differentiation order is between zero and one. Ad-
ditionally, we assume that the system uncertainties are randomly
distributed in the state matrix and the output matrices as well. By
decoupling the necessary conditions into a set of matrix inequal-
ities, we show that the search of the observer and the controller
gains can be transformed into a convex optimization problem. A
set of sufficient linear-matrix-inequality conditions are developed
to ensure the existence of a pseudo-state observer-based controller
assuring the asymptotic stability of the pseudo-state system under
consideration. It is shown that the developed results are less con-
servative by demonstration of a case study. In the particular case
where the system uncertainty are null, sufficient conditions for sta-
bility by dynamic output feedback is given when the non-integer
differentiation order is between 0 and 2. Detailed proofs are pre-
sented and the efficiency of the proposed design is testified by nu-
merical simulations.
2. Preliminaries
Throughout this paper we note by R,R>0, and Cthe set of
real number, the set of positive real numbers, and the set of
complex numbers, respectively. The notation A>0, with Abeing
a Hermitian matrix (respectively, A<0), means that the matrix A
is positive definite (respectively, negative definite). A′is the matrix
transpose of A.X⋆stands for the complex conjugate transpose of
the matrix X. The notation ¯
Xstands for the matrix conjugate of
the complex matrix X. The star element in a given matrix stands
for any element that is induced by conjugate transposition. The
spec(A) denotes the set of the eigenvalues of the matrix A. We
note by Iand 0the identity matrix of appropriate dimension
and the null matrix of appropriate dimension, respectively. ℜ(Z)
stands for the real part of the complex matrix/number while ℑ(Z)
denotes the imaginary part of the complex matrix/number. The
notation [a]Gstands for the integer part of the real a. In this paper,
Riemann–Liouville fractional differentiation definition is used.
Referring to Samko, Kilbas, and Marichev (1987), the fractional
integral of a continuously differentiable function f(t)is defined by:
Iαf(t)=1
Γ(α) t
0
(t−τ )α−1f(τ )dτ , t>0 (1)
where α∈R>0denotes the fractional-integration order, and
Γ(α) =+∞
0
e−xxα−1dx.(2)
The order αfractional derivative of a function f(t), with α∈R>0,
is consequently defined by:
Dαf(t)=dm
dtmIm−αf(t)
=1
Γ(m−α) d
dt mt
0
(t−τ )m−α−1f(τ ) dτ;t>0 (3)
where mis the smallest integer verifying ‘‘m−1< α < m’’.
In Annaby and Mansour (2012), it has been reported that the Rie-
mann–Liouville fractional derivative of order αcoincides with the
definition of the Grünwald–Letnikov definition, that is
Dα
GLf(t)=lim
T→0
1
Tαt
TG
k=0
(−1)kα
kf(t−kT ), t>0,(4)
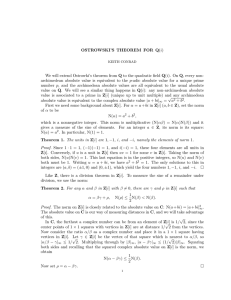
Fig. 1. Stability domain of fractional-order linear systems 0 < α < 1.
where
α
k=α(α −1)· · · (α −k+1)
k!,for;k̸= 0,
1,for;k=0.
(5)
The Grünwald–Letnikov definition (4) is a generalization of the or-
dinary discretization formulas for integer-order derivatives. De-
pending on the value of the fractional-differentiation order ‘‘α’’,
several stability theorems have been stated, see the results in
Matignon (1996) for 0 < α < 1 and Sabatier et al. (2010) for
1< α < 2.
Theorem 2.1 (Moze, Sabatier, & Oustaloup, 2005).Let A ∈Rn×nbe
a real matrix. Then, the fractional-order system:
Dαx(t)=A x(t), 1< α < 2,(6)
is asymptotically stable, that is, |arg(spec(A))|> α π
2if and only if
there exists a symmetric and positive definite matrix P verifying
(AP +PA′)sin(θ) (AP −PA′)cos(θ )
⋆ (AP +PA′)sin(θ)<0 (7)
where θ=(1−α
2)π.
The following result concerns the stabilizability of fractional-order
linear systems by means of pseudo-state feedback where its proof
is given in Farges et al. (2010). As it has been reported in the
literature, the stability of fractional-order linear systems is one
particular case of domain stability where the eigenvalues of the
system should be located in a specific region of the complex plane
as shown in Fig. 1.
Theorem 2.2 (Farges et al., 2010).The fractional-order system:
Dαx(t)=A x(t)+B u(t), where 0< α < 1,A∈Rn×n, and B ∈
Rn×m, is stabilizable by pseudo-state feedback u =Y(rX +¯
r¯
X)−1x iff
∃X=X⋆∈Cn×n>0and Y ∈Rm×nsuch that
(rX +¯
r¯
X)′A′+A(rX +¯
r¯
X)+BY +Y′B′<0,(8)
where r =ei(1−α) π
2,i2= −1.
The Schur Complement lemma along with the result of the
following lemma are extensively used in the proof of the main
statement.
Lemma 2.3 (Boyd, Ghaoui, Feron, & Balakrishnan, 1994).Given real
matrices H, E and Y <0of appropriate dimensions, the inequality:
Y+HF(t)E+E′F′(t)H′<0holds for all F(t)satisfying F ′(t)F(t)≤I
if and only if there exists an ε > 0such that Y +εHH′+ε−1E′E<0.
Theorem 2.2 will serve as a starting result for further development.
The details are given in the following sections.

218 S. Ibrir, M. Bettayeb / Automatica 59 (2015) 216–223
3. Observer-based stabilization
The objective of this section is to develop new LMI conditions
for stabilization of pseudo-state fractional-order linear systems
subject to state and output uncertainties. The ultimate goal of the
proposed development is to decouple the necessary conditions
guaranteeing the convergence of the observer-based feedback
into two sets of convex sufficient conditions that are numerically
tractable.
3.1. Main result
Consider the fractional-order-pseudo-state system of commen-
surate type described by the following dynamics:
Dαx=(A+MAFANA)x+B u,
y=(C+MCFCNC)x,(9)
where αis the non-integer differentiation order (0 < α < 1),
x=x(t)∈Rnis the pseudo state vector, u=u(t)∈Rmis the
control input, and y=y(t)∈Rpis the system measured output.
The real-valued matrices A∈Rn×n,B∈Rn×m, and C∈Rp×nare
assumed to be known and constant. The uncertain parameters of
the systems are regrouped in the constant matrices FAand FCwhile
we assume that the remaining real-valued matrices MA,MC,NA,
and NCare known. Consequently, the uncertain matrices 1A=
MAFANA∈Rn×nand 1C=MCFCNC∈Rp×nare norm-bounded.
Additionally, based upon the knowledge of the upper and the lower
bounds of the uncertain parameters of the system, we assume that
F′
AFA≤Iand F′
CFC≤I. In this paper, we focus on observer-
based control of pseudo-state-fractional-order systems without
involving the true state of the fractional order system in the design.
Therefore, it is assumed that the pair (A+1A,B)is controllable and
the pair (A+1A,C+1C)is observable in the sense of Kalman for
all possible bounded uncertainties 1Aand 1C.
In the sequel, the time argument is omitted for notation
simplicity. In this subsection, we present sufficient conditions
under which an observer-based controller of the following form:
Dαˆ
x=Aˆ
x+B u +L(Cˆ
x−y), u=Kˆ
x(10)
could make the closed-loop system: Dαx=(A+1A)x+B u,u=
Kˆ
xglobally stable, where Land Kare some design matrices to
be determined later. Before presenting the main result, let us
introduce the following result.
Proposition 3.1. Let r =eiθwhere i2= −1, θ =(1−α) π
2,0<
α < 1. If there exists a Hermitian matrix X =X⋆>0such that
1
cos(θ ) (rX +¯
r¯
X)+(rX +¯
r¯
X)′
+i
sin(θ ) (rX +¯
r¯
X)−(rX +¯
r¯
X)′>0 (11)
then, there exists a Hermitian matrix Z =Z⋆>0such that
(rX +¯
r¯
X)−1=rZ +¯
r¯
Z.(12)
Proof. Setting the matrix Zas
Z=1
4 cos(θ ) (rX +¯
r¯
X)−1+(rX′+¯
r¯
X′)−1
−i
4 sin(θ ) (rX +¯
r¯
X)−1−(rX′+¯
r¯
X′)−1.(13)
To verify (12), notice that rX +¯
r¯
Xis a real matrix; therefore,
ℜ(Z)=1
4 cos(θ) (rX +¯
r¯
X)−1+(rX′+¯
r¯
X′)−1and ℑ(Z)=
−1
4 sin(θ) (rX +¯
r¯
X)−1−(rX′+¯
r¯
X′)−1. Since rZ +¯
r¯
Z=
2 cos(θ)ℜ(Z)−2 sin(θ)ℑ(Z)then, (12) holds true. The positive-
definiteness property of the matrix Zis verified by pre-multiplying
inequality (11) by (rX +¯
r¯
X)−1and post-multiplying the same
inequality by (rX′+¯
r¯
X′)−1.
Now, we are ready to present the main result of the paper.
Theorem 3.2. Consider system (9) where the uncertain matrices 1A
and 1C are not null. Define θ=(1−α) π
2and r =eiθsuch that
i2= −1. If there exist a set of matrices X1=X⋆
1∈Cn×n,X2=
X⋆
2∈Cn×n,W∈Rn×n,Y1∈Rm×n,Y2∈Rn×pand a set of
positive scalars ε1, ε2, ε3, and ε4such that the following linear matrix
inequalities hold simultaneously:
X1>0,X2>0,W=W′>0,
1
cos(θ ) (P2+P′
2)+i
sin(θ ) (P2−P′
2) > 0,(14)
P1+P′
1−W I
⋆ (2ε3−1)I>0,(15)
L11 BY1P′
1N′
AP′
1N′
CP′
1N′
A
⋆−I0 0 0
⋆ ⋆ −ε1I0 0
⋆ ⋆ ⋆ −ε2I0
⋆ ⋆ ⋆ ⋆ −ε4I
<0 (16)
K11 P′
2MAY2MCε3I
⋆ (−2+ε1)I0 0
⋆ ⋆ (−2+ε2)I0
⋆ ⋆ ⋆ −W
<0 (17)
where
P1=(rX1+¯
r¯
X1), P2=(rX2+¯
r¯
X2),
L11 =P′
1A′+AP1+BY1+Y′
1B′+ε4MAM′
A,
K11 =A′P2+P′
2A+Y2C+C′Y′
2
(18)
then, the observer-based feedback u =Y1P−1
1ˆ
x stabilizes system
(9) with ˆ
x=ˆ
x(t)being the state vector of the pseudo-state fractional-
order observer:
Dαˆ
x=Aˆ
x+B u +(rX′
2+¯
r¯
X′
2)−1Y2(Cˆ
x−y),
u=Y1(rX1+¯
r¯
X1)−1ˆ
x.(19)
Proof. Let e=ˆ
x−xbe the observation error. Then, the closed-
loop dynamics of system (9) and observer (19) under the feedback
u=Y1P−1
1ˆ
xare given by the composite system:
Dαx
e=A+1A+BY1P−1
1BY1P−1
1
−1A−P′−1
2Y21C A +P′−1
2Y2Cx
e
=A∆
closed x
e.(20)
According to the result of Theorem 2.2, the composite system (20)
is stable if there exists a Hermitian matrix Z=Z⋆>0 of
dimensions 2n×2nsuch that
A∆
closed(rZ +¯
r¯
Z)+(rZ +¯
r¯
Z)′A∆′
closed <0.(21)
Note that if the condition: 1
cos(θ) (P2+P′
2)+i
sin(θ) (P2−P′
2) > 0
holds true then, by the use of the result of Proposition 3.1,∃Z2>0
such that (rX2+¯
r¯
X2)−1=rZ2+¯
r¯
Z2, and therefore,
diagrX1+¯
r¯
X1, (rX2+¯
r¯
X2)−1=diagP1,P−1
2
=rdiagX1,Z2+¯
rdiag¯
X1,¯
Z2.(22)

S. Ibrir, M. Bettayeb / Automatica 59 (2015) 216–223 219
If X1=X⋆
1>0 and X2=X⋆
2>0 then, by taking Z=
diagX1,Z2>0, inequality (21) holds true if the following holds:
W=W11 W12
⋆W22<0,(23)
where the entries of the matrix Ware:
W11 =(A+1A)P1+P′
1(A+1A)′+BY1+Y′
1B′,
W12 =BY1P−1
1P−1
2−P′11A′−P′11C′Y′
2P−1
2,
W22 =AP−1
2+P′−1
2A′+P′−1
2(Y2C+C′Y′
2)P−1
2.
(24)
By expanding the matrix Was
W=W11 BY1P−1
1P−1
2−P′11C′Y′
2P−1
2
⋆W22
−0
MAFANAP10−NAP10′F′
A0
MA′
.(25)
Then, based on the result of Lemma 2.3 and (25), inequality W<0
holds if there exists ε1>0 such that the following holds true:
G1=W11 BY1P−1
1P−1
2−P′11C′Y′
2P−1
2
⋆W22
+ε10
MA0M′
A+ε−1
1P′1N′
A
0NAP10<0.(26)
It is obvious that G1<0 if the following matrix inequality is
verified:
G2=I0
⋆P′2G1I0
⋆P2
=R11 BY1P−1
1−P′11C′Y′
2
⋆R22 <0 (27)
where R11 =W11 +ε−1
1P′1N′
ANAP1,R22 =P′2W22 +ε1MAM′AP2.
Similarly, the matrix inequality G2<0 can be rewritten as follows:
G2=R11 BY1P−1
1
⋆R22 −0
Y2MCFCNCP10
−P′1N′C
0F′C0M′CY′
2<0.(28)
Applying again Lemma 2.3, a necessary and sufficient condition to
fulfill (28) is given by:
G3=R11 BY1P−1
1
⋆R22 +ε−1
2P′1N′C
0NCP10
+ε20
Y2MC0M′CY′
2
=R11 +ε−1
2P′1N′CNCP1BY1P−1
1
⋆R22 +ε2Y2MCM′CY′2
<0.(29)
The matrix inequality G3<0 is not linear. In order to decouple
the LMI variables, notice that the matrix G3can be decomposed as
follows:
G3=I0 0
0P′−1
1I
R11 +ε−1
2P′1N′CNCP1BY10
⋆−I0
⋆ ⋆ Ω
×
I0
0P−1
1
0I
(30)
where Ω=R22 +ε2Y2MCM′CY′2+P′−1
1P−1
1. Consequently, G3<0
if the following holds true:
R11 +ε−1
2P′1N′CNCP1BY10
⋆−I0
⋆ ⋆ Ω
<0.(31)
This implies immediately that the following conditions:
R11 +ε−1
2P′1N′CNCP1BY1
⋆−I<0,
R22 +ε2Y2MCM′CY′2+P′−1
1P−1
1<0
(32)
must hold simultaneously to ensure G3<0. Let us now introduce
new scalar LMI variable: ε3>0 and a new LMI variable W∈Rn×n
such that P′−1
1P−1
1< ε2
3W−1. This last inequality does not restrict
the design of P1because any positive definite matrix can be upper-
bounded by another positive definite matrix. Then, the second
inequality of (32) is verified if the following condition holds true,
that is R22 +ε2Y2MCM′CY′2+ε2
3W−1<0,P′−1
1P−1
1< ε2
3W−1.
Since
P1+P′1≤ε2
3P1P′1+ε−2
3I, ε3>0,(33)
and,
P′−1
1P−1
1< ε2
3W−1=⇒ ε2
3P1P′
1>W.(34)
Then, ε2
3P1P′
1>Wif P1+P′1−W−ε−2
3I>0 which is equivalent
by the Schur complement lemma to
P1+P′1−W I
Iε2
3I>0.(35)
Since ε2
3>2ε3−1 then, the linear matrix inequality (15) is a
sufficient condition to fulfill (35). Furthermore, using the Schur
complement, inequality R22 +ε2Y2MCM′CY′2+ε2
3W−1<0 is
verified if the following holds:
R22 +ε2Y2MCM′CY′2ε3I
⋆−W<0.(36)
The last inequality is equivalent by the Schur complement lemma
to the following inequality:
P′2A+A′P2+Y2C+C′Y′
2P′2MAY2MCε3I
⋆−ε−1
1I0 0
⋆ ⋆ −ε−1
2I0
⋆ ⋆ ⋆ −W
<0.(37)
Since −ε−1
1< ε1−2 and −ε−1
2< ε2−2 then, the linear matrix
inequality (17) is a sufficient condition to fulfill (37). The first
inequality of (32) is equivalent by the Schur Complement lemma
to inequality (38) as given in Box I. Using Lemma 2.3, we could find
ε4>0 such that 1AP1+P′11A′≤ε4MAM′
A+ε−1
4P′1N′
ANAP1.
Therefore, the condition given by (39) in Box I is a sufficient
condition to fulfill (38). Finally, one can easily verify that (39) is
equivalent by the Schur Complement lemma to (16). This ends the
proof.
In case where the system uncertainties are null, the computa-
tion of the controller and the observer gains are summarized in the
following statement.
Corollary 3.3. Consider the pseudo-state fractional-order system (9)
with 1A=0and 1C=0. Let θ=(1−α) π
2and r =eiθwhere
i2= −1. If there exist two complex, Hermitian, and positive definite
matrices X1=X⋆
1∈Cn×n,X2=X⋆
2∈Cn×n, a real, symmetric,
and positive definite matrix W ∈Rn×n, a positive scalar ε, and two

220 S. Ibrir, M. Bettayeb / Automatica 59 (2015) 216–223
(A+1A)P1+P′1(A+1A)′+BY1+Y′
1B′BY1P′
1N′
AP′
1N′
C
⋆−I0 0
⋆ ⋆ −ε1I0
⋆ ⋆ ⋆ −ε2I
<0.(38)
AP1+P′1A′+BY1+Y′
1B′+ε4MAM′
A+ε−1
4P′1N′
ANAP1BY1P′
1N′
AP′
1N′
C
⋆−I0 0
⋆ ⋆ −ε1I0
⋆ ⋆ ⋆ −ε2I
<0 (39)
Box I.
matrices Y1∈Rm×n,Y2∈Rn×psuch that the following linear matrix
inequalities hold true:
1
cos(θ ) (P2+P′
2)+i
sin(θ ) (P2−P′
2) > 0,(40)
P1+P′
1−W I
⋆ (2ε−1)I>0,(41)
P′
1A′+AP1+BY1+Y′
1B′BY1
⋆−I<0,(42)
A′P2+P′
2A+Y2C+C′Y′
2εI
⋆−W<0,(43)
where P1=(rX1+¯
r¯
X1)and P2=(rX2+¯
r¯
X2)then, the observer-
based feedback u =Y1P−1
1ˆ
x stabilizes system (9) when all the
uncertainties are null with ˆ
x being the state trajectory of the pseudo-
state fractional-order observer:
Dαˆ
x=Aˆ
x+B u +(rX′
2+¯
r¯
X′
2)−1Y2(Cˆ
x−y),
u=Y1(rX1+¯
r¯
X1)−1ˆ
x.(44)
Proof. The new conditions are obtained by putting MA,NA,MC, and
NCequal to zero. The outline of the proof remains unchanged as
shown in the proof of Theorem 3.2.
3.2. Sufficient conditions with equality constraint
Here, it is showed that the observer-based conditions for
stabilization of fractional-order systems can be reformulated
as linear matrix inequalities subject to equality constraint. The
obtained result can be applied to fractional order-systems where
the degree of differentiation αcan take non-integer values inside
the interval ]0 2[. The whole design is given by the following
statement.
Theorem 3.4. Consider the pseudo-state fractional-order system
Dαx=A x +B u,y=C x,(45)
where 0< α < 2, A ∈Rn×n,B∈Rn×m, and C ∈Rp×n. Define the
pseudo-state observer-based controller as:
Dαˆ
x=Aˆ
x+B u +L(Cˆ
x−y), u=Kˆ
x.(46)
Let θ=(1−α
2)π. If there exist two symmetric matrices P1∈Rn×n>
0,P2∈Rn×n>0, a matrix Y ∈Rn×p, a matrix ¯
K∈Rm×n
and a matrix Z ∈Rm×msuch that the following set of linear matrix
inequality hold simultaneously:
R1R2
⋆R1<0,P1B=BZ,(47)
where R1and R2are defined in (48) as given in Box II. Then, the
pseudo-state system (45) is stable under the action of the observer
controller u =Kˆ
x where ˆ
x is the state vector of the fractional-order
pseudo-state observer (46) with K =Z−1¯
K and L =P−1
2Y .
Proof. First of all, it is important to stress that even Theorem 2.1
is a necessary and a sufficient condition for checking a system sta-
bility with 1 < α < 2, it can be also used for stabilizability design
for 0 < α < 1. In other words, conditions (7) are only sufficient
conditions for 0 < α ≤1. This comes from the fact that inequality
(7) is satisfied if and only if the diagonal block A′P+PA is negative
definite with sin(α π
2)being always positive for 0 < α < 1. Having
A′P+PA <0 implies that all the eigenvalues of Aare located in the
left-hand side of the complex plane which leads to the conclusion
that |arg(spec(A))|> α π
2,0< α < 1, see Matignon (1996) for
more details.
The system and the observer dynamics are given by the follow-
ing composite system:
Dαx
e=A+BK BK
0A+LCx
e=Aclosed x
e.(49)
The design of the observer-controller gains Land Kis conditioned
by the stability of the fractional-order augmented system (49).
Based on the stability result of fractional-order systems, see the
statement of Theorem 2.2, one can conclude that system (49) is
stable if there exists a matrix X=X′=P−1>0, of appropriate
dimension, such that the following holds:
A1A2
⋆A1<0 or,Π1Π2
⋆Π1<0,(50)
where A1=(AclosedX+XA′
closed)sin(θ ), A2=(AclosedX−
XA′
closed)cos(θ ), θ =(1−α
2)π, Π1=(PAclosed +A′
closedP)sin(θ ),
and Π2=(PAclosed −A′
closedP)cos(θ ). Let us now take the parti-
tion of Pas P=diag(P1,P2)where P1∈Rn×n,P2∈Rn×n. Let
Z∈Rm×mbe any full-rank matrix and let Y∈Rn×pbe any real-
valued matrix. Then, by introducing the following constraint:
P1B=BZ,(51)
and set the controller and the observers gains as K=Z−1¯
K,L=
P−1
2Ythen,
A′
closedP=A′P1+¯
K′B′0
¯
K′B′A′P2+C′Y′.(52)
This implies that the stability of the fractional-order system (45) is
dependent on the solvability of the linear matrix inequalities (47).
This ends the proof.
The statement of Theorem 3.4 summarizes the design of
dynamic-output stabilizing feedbacks for larger class of fractional
order linear systems. However, the constraints imposed on the
matrix P1introduce some conservatism. Extensive simulations
have also shown that the LMIs of Theorem 3.4 are not feasible for
some single-input fractional-order systems.
 6
7
8
6
7
8
1
/
8
100%