Cours de Géomécanique : Mécanique des sols et des roches
Telechargé par
Kone Ouodiouma

COURS DE GEOMECANIQUE
GEOMECANIQUE
Cours janvier 21

Cours de Géomécanique
1
Informations de base:
Le module de géomécanique.
Pre-requis
Pour que l’étudiant puisse bénéficier de ce cours aux mieux, il est recommander que
l’étudiant suivent des cours de géologie structurales, de la mécanique des fluides et avoir un
bon niveau en mathématique.
Informations concernant l’enseignant :
Nom : Kone
Prénom : Ouodiouma
Ingénieur géologue géophysicien
Description du cours:
Ce cours vise à donner aux étudiants, les principes de base de la géomécanique. Comment travailler
avec les paramètres géomécanique. Ce cours a pour but de donner aux étudiants les bagages
nécessaire pour affronter soit une vie recherche ou professionnelle (géotechnique, pétrolier, minier).
C’est pourquoi ce cours traite, la mécanique des sols/roches et les réservoirs.
En effet, les réservoirs pétroliers, de carbone ou de géothermie font l’objet de beaucoup de
recherches en termes de mécanique au niveau réservoir. Donc ce cours vise à donner les bases. Donc
d’ouvrir la porte à l’étudiant désiré d’avancer dans domaine.
Objectifs d’apprentissage:
A travers ce cours, les étudiants seront capable de comprend les différents tests appliquer au
laboratoire pour caractérisé un échantillon (sol ou roche) du point de vue mécanique. Comprendre les
différents paramètres utilisés pour caractérisé les roches et les sols. Les étudiants seront de
comprendre comment on utilise les différents paramètres géomécanique pour caractériser les
réservoirs pétroliers, de stockage de carbone et de géothermie.
Relation avec le programme de cours:
Cours intègre parfaitement dans le parcours de l’étudiant, puis cour concerne une matière
interdisciplinaire. Ce cours touche un peu de tout : sismique, géologie structurale, réservoir pétrolier
etc..
Matériel de cours:
Le support utilisé dans ce cours sera un polycopié qui sous format électronique qui sera transmis aux
étudiants à la fin du cours.
Modes d’évaluation:
L’évaluation finale sera faite une fois les cours magistraux terminés.
Principes de fonctionnement du cours:(à préciser)
Le principe de fonctionnement des cours est basé sur la concentration et être en classe a l’heure.
Information complementaire
Une liste de bibliographie sera donnée à la fin du polycopié permettant aux étudiants
d’approfondir les connaissances.

Cours de Géomécanique
2
TABLE DES MATIERES
Chapitre 1 : Rappel sur les sols: Structure – Identification et Classification
Chapitre 2: Hydraulique souterraine
Chapitre 3 : Les contraintes
Chapitre 4 : les déformations
Chapitre 5 : Résistance des roches
Chapitre 6 :

Cours de Géomécanique
3
CHAPITRE 1
1- Eléments constitutifs d’un sol
Un sol est un mélange :
d’éléments solides : Provenant de la désagrégation mécanique et/ou chimique
d’une roche mère.
On distingue les minéraux non argileux (>2m et ayant le même
comportement que la roche mère : Sols pulvérulents), les minéraux argileux
(kaolinite, illite et montmorillonite) et les sols organiques (vases et tourbes).
d’eau : Existe sous plusieurs formes (eau de constitution, inter-feuillets, liée et
libre).
de gaz : Contenu dans les vides, c’est l’air pour un sol sec ou mélange d’air et
de vapeur d’eau pour un sol humide.
2- Paramètres de définition des sols
2-1 Modèle élémentaire d’un sol
Un sol étant composé de grains solides, d’eau et d’air, on peut rassembler chaque
phase en un volume partiel unique de section unit. Les notations suivantes sont
utilisées :
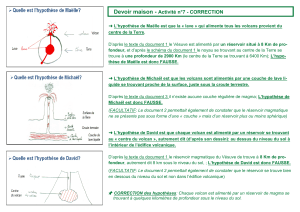
Figure 1: Model élémentaire de sol
Va : volume de l’air. Vw : volume de l’eau.
Vs : volume des grains solides.
Vv = Va + Vw : volume des vides.
Rappel sur les sols: Structure – Identification et Classification
et definition de la geomecanique

Cours de Géomécanique
4
V = Vv + Vs : volume total du sol
W w: poids de l’eau Ws : poids des grains solides
W = Ww + Ws : poids total
2-2 Les poids volumiques
Le poids volumique (spécifique) total ou humide :
W/V
Le poids volumique des grains solides :
s=Ws/Vs
Le poids volumique du sol sec :
d= Ws/ V
Le poids volumique de l’eau :
w= Ww/ Vw= 10kN/ m3 = 1t/m3
Poids volumique du sol saturé :
sat= W/ V
Poids volumique déjaugé :
’=satw
La gravité spécifique :
Gs=s/w
2.3 Les paramètres d’état
Ils indiquent dans quelles proportions existent les différentes phases d’un sol. On
définit :
La teneur en eau :
Ww/ Ws x100
L’indice des vides : e =Vs/Vv
Le degré de saturation : Sr%= Vw/ Vv x 100
La porosité :
Vv/ V
Tous ces paramètres ne sont pas indépendants. Ils sont reliés par des relations que
l’on peut retrouver à l’aide du modèle élémentaire. Exemple de formules :
d=
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%