Fascicule de Travaux Pratiques : Techniques de Commande Electrique
Telechargé par
Aziz Rachid

République Algérienne Démocratique et Populaire
Ministère de l'Enseignement Supérieur et de la Recherche Scientifique
Université Djillali Liabès de Sidi Bel-Abbès
Faculté de Génie Electrique
Département d’Electrotechnique
Fascicule de Travaux Pratiques :
Techniques de Commande Electrique
Présenté Par :
Dr. Youcef DJERIRI
&
Pr. Abdelkader MEROUFEL
E-mail : youcef.djeriri@univ-sba.dz
Année Universitaire : 2017-2018
Dernière mise à jour : 12/12/2019

Avant-propos
La commande classique des systèmes électriques est un important secteur de
recherche englobant les systèmes électriques, leurs commandes ainsi que le
contrôle des machines électriques. Ce domaine est à la base de tous les
développements techniques majeurs récents grâce aux nouvelles méthodes ou
aux nouvelles structures de commandes modernes utilisées.
Ce recueil des travaux pratiques des machines électriques en courant continu
et alternatif se compose de sept fiches de TP. Il s’adresse aux étudiants de la
formation master 2 en Electrotechnique, parcours « Commandes Electriques »
ainsi que le master 2 en Electromécanique, parcours « Electromécanique » dans
le cadre du programme officiel. Mais bien entendu il peut être étudié par tous
ceux en 1er cycle, en 2éme cycle, ou même en post-graduation, qui désirent
approfondir leurs connaissances ou avoir un document de base en matière de
simulation par le logiciel Matlab/Simulink des machines électriques.
L’étudiant doit donc avoir des connaissances de base du logiciel
Matlab/Simulink. Le but de ce recueil est de familiariser l’étudiant avec :
Les méthodes de modélisation des machines électriques (à courant continu,
synchrone et asynchrone), la conception des commandes, la synthèse et le
dimensionnement des correcteurs classiques et surtout l’étude des
performances. D’autre part, de lui apprendre à choisir judicieusement et
correctement la commande appropriée.
Les méthodes de commande sont présentées dans un ordre progressif
d’amélioration relative des performances.
Nous espérons que ce recueil sera apprécié par nos collègues et les étudiants
et nous seront très heureux de recevoir avec reconnaissance leurs remarques,
critiques et suggestions.

Sommaire
TP N°1 Commande d’une machine à courant continu P. 01
TP N°2 Commande en boucle ouverte de l’association
moteur asynchrone-onduleur avec pilotage MLI P. 08
TP N°3
Commande scalaire en tension avec convertisseur et
pilotage MLI d’un moteur asynchrone (Régulation
avec boucle de vitesse)
P. 17
TP N°4 Commande vectorielle d’une machine asynchrone P. 25
TP N°5 Commande en boucle ouverte de l'association
moteur synchrone-onduleur avec pilotage MLI P. 36
TP N°6 Commande vectorielle d’une machine synchrone P. 42
TP N°7 Commande directe du couple (DTC) de la machine
asynchrone/synchrone P. 50

TP : N°01 Commande d’une machine à courant continu
UDL ‒ SBA 1 2017-2018
TP : N°01
Commande d’une machine à courant
continu

TP : N°01 Commande d’une machine à courant continu
UDL ‒ SBA 2 2017-2018
1. Introduction
L’application de la régulation de vitesse des moteurs électriques est très répondue dans les
systèmes industriels et automatiques, l’un des critères d’efficacité d’une telle régulation est sa
robustesse face aux changements. Elle permet d’effectuer une régulation des paramètres
physiques (vitesse, position, température… etc.) des systèmes en boucle fermée, c’est à dire
un système capable d’atteindre et de maintenir une certaine consigne en utilisant une mesure,
dont il reste à déterminer la fonction permettant de corriger la commande en fonction de la
consigne initiale et de l’erreur mesurée.
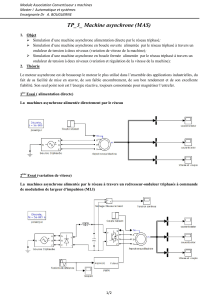
Il s’agit donc dans ce TP de la régulation de la vitesse d’un moteur à courant continu (MCC)
à excitation séparée, alimenté par un hacheur série, en utilisant un régulateur de type
Proportionnel-Intégral (PI).
Le hacheur est un convertisseur statique permettant, à partir d’une source de tension
continue fixe, d’obtenir une tension continu de valeur moyenne variable (figure 1). On
utilise un interrupteur statique pour ‘’hacher ‘’ la tension continue et alimenter une charge.
Nous allons nous intéresser au cas particulier d’un hacheur série dont on peut commander le
rapport cyclique α.
Fig. 1 : Alimentation d’un MCC par un hacheur série
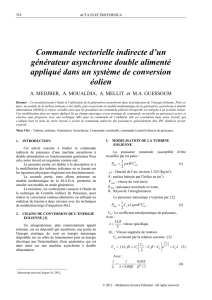
2. Modélisation de la machine à courant continu
Il s’agit d’un MCC à excitation séparée commandé par la tension d’induit, dont le schéma
technologique est illustré dans la figure 2.
Fig. 2 : Schéma technologique de la machine à courant continu
MCC
Alimentation
continue
Ω
Charge
Ω(t)
J
fr
(
)
=
.
(
)
ua(t)
ia(t)
M
R
a
La
(
)
=
.
(
)
(
)
=
.
(
)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
1
/
64
100%