UED ID22, 2008-2009 Transmission de Puissance

15/10/2008
1
UED ID22, 2008-2009
Transmission de Puissance
Transmission d’énergie électrique
TD n°2 et 3
E. Semail, X. Kestelyn
Suivi de profil vitesse et récupération d’énergie
Introduction
Nous nous intéressons dans ce TD à une famille de procédés pour laquelle les exigences sont différentes
de la famille « pompage » (TDn°1). On ne se contente plus de vouloir travailler à différentes vitesses. On
veut à présent suivre un profil de vitesse. Un asservissement de vitesse sera alors nécessaire d’autant plus
que les couples de charge varient. Par ailleurs, dans la mesure où ces systèmes démarrent et s’arrêtent
souvent, il existe actuellement (études européenne et américaine de 2003, 2005) de fortes potentialités
pour récupérer de l’énergie lors du freinage.
Cette famille comporte entre autres, des ascenseurs, des machines outils, des centrifugeuses, des
véhicules électriques.
Figure 1 : extrait de extrait de VSDs-SAVE-Study-Final-Report.pdf
Support d’étude : ascenseur
Evolution des ascenseurs ces trente dernières années
Au début des années 80, la plupart des ascenseurs utilisaient une machine à courant continu pour leur
motorisation. Afin de pouvoir l'alimenter avec des tensions élevées et de forts courants un groupe
« Ward-Leonard » était utilisé1.
1 à savoir une machine asynchrone connectée au réseau alternatif entrainant une génératrice à courant
continu qui produisait alors une tension continue réglable alimentant un moteur à courant continu Ces
ensembles de machines avaient pour but d'adapter l’énergie électrique : ce sont des convertisseurs
"électriques" tournants. Lorsqu'ils ont été remplacés pars des montages d'électronique de puissance, ces
derniers ont été alors appelés convertisseurs statiques... et ils ont, depuis, conservés cette appellation.

15/10/2008
2
Avec les progrès de l'Electronique de puissance, les convertisseurs statiques AC - DC à thyristors (voir
cours 1ere année) ont remplacé avantageusement les encombrants groupes Ward-Leonard.
Les progrès croissants de l'Electronique de Puissance et de l'Informatique Industrielle, ont ensuite permis
d'utiliser des machines asynchrones. En effet, celles-ci ont l'avantage indéniable de ne pas posséder de
collecteur mécanique (balais) ce qui évite les problèmes de maintenance des machines à courant continu.
Un redresseur à diode permettait d'obtenir une tension continue pour alimenter un onduleur triphasé
directement connecté à la machine. Les variateurs électroniques utilisés étaient basés sur des lois
statiques de type V/f (celle utilisée dans cette manipulation) dont les performances dynamiques sont
limitées.
Depuis le début des années 90, de plus en plus d'ascenseurs utilisent des variateurs électroniques avec des
lois de commande dynamiques tel le contrôle vectoriel. Ces lois de commande permettent en effet de
mieux gérer les régimes transitoires et de réduire de ce fait la consommation.
Suite aux problèmes de pollution harmonique et aux normes croissantes, le redresseur à diode initial
devrait de plus en plus être remplacé par un redresseur commandé à IGBT, moins polluant mais aussi
réversible. Cette dernière propriété permet de surcroît de limiter la consommation électrique en renvoyant
une partie de l'énergie électrique récupérée lors de la descente d'une cabine (mode frein).
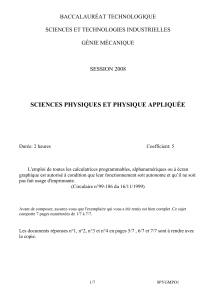
D'autres nouveaux systèmes utilisent des moteurs plats afin de réduire l'encombrement de la machine.
Des machines synchrones à aimants permanents sont utilisées dans ce cadre. Le gain obtenu (pour un
nombre réduit d'étage, c'est à dire une puissance nécessaire pas trop élevée) permet de supprimer la salle
de machine au-dessus de la cage d'ascenseur : le moteur s'insère alors dans cette cage, entre la cabine et le
contrepoids le plus souvent.
Figure 2: ascenseur sans la salle
des machines (KONE elevator)
Figure 3: moteur plat à flux
axial
Figure 4: coupe du moteur
a> stator b>aimant permanent
c>culasse ferromagnétique
rotorique d>arbre

15/10/2008
3
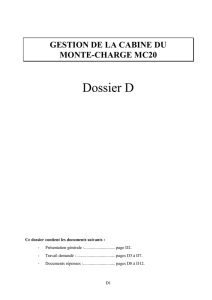
On considérera le système simple de la Figure 5 pour l’étude.
A>Suivi de profil
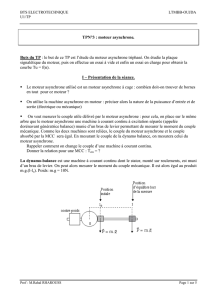
Un profil typique pour le passage d’un palier à un autre est donné en Figure 6. Il comporte différentes
phases qui doivent pouvoir être ajustées sur mesure pour le confort et la sécurité des passagers.
On prendra dans la suite un profil simplifié Figure 6.
0 245678910111213141516
0
0,3
0,6
0,9
1,2
Temps en seconde
vitesse de la cabine en m/s
phase 1 phase 2 phase 3 phase 4
Figure 6 : à gauche exemple de profil de vitesse réel, à droite celui adopté
1>En considérant une masse utile mu de 630 kg, en déduire le profil de force requis par la charge en
phase de montée.
2> En supposant un entraînement direct, quelle serait la vitesse maximale de rotation du moteur Ωmax
ainsi que le couple maximum requis Tmax et la puissance maximale Pmax ? Quel est le taux et la durée de la
surcharge du moteur par rapport au régime permanent? La valeur maximale de l’accélération est liée à
des considérations de confort des passagers. Que vaut la surcharge si on réduit à 0,5s la phase 1.
Poulie/moteur
Cabine
Contrepoids
Charge utile
D
2
p
sens positif pour
le couple et la vitesse de
rotation
Masse du contrepoids:
mc=400 kg
Moment d'inertie de la
p
oulie: J =3,5 kg
m
On négligera dans tout le problème la
masse des cables
2
Accélération de la pesanteur
g=10 m/s
Diamètre de la poulie:
D =25 cm
Masse de la cabine:
mv=90 kg
Masse maximale de la
charge utile: mu=630 kg
+
Figure 5

15/10/2008
4
3>Un moteur asynchrone développant le couple désiré à la vitesse de régime permanent n’appartient pas
aux gammes standard. Afin de pouvoir utiliser un moteur 230/400V de vitesse de synchronisme 1500
tr/mn on utilise un transmetteur mécanique de rendement 85% et de rapport de réduction 12,5. Parmi les
différentes options proposées par le constructeur Schneider Electric (voir annexe), quel est le variateur
qui convient dans les 2 cas correspondant à 2 s et 0,5 s d’accélération?
4>Ce moteur est alimenté par un onduleur de tension commandé en Modulation de Largeur d’Impulsions
dont la commande permet de maintenir constant le rapport entre valeur efficace de la tension simple Vs et
la fréquence d’alimentation fs : Vs/fs=K. Pour étudier son alimentation on considère un modèle
monophasé (de régime permanent) donné en Figure 7.
On rappelle2 :
• l’expression du couple :
r
ms
ms
r
ms
T
T
ω
ω
ω
ω
+
=2 avec 2
1
2
2
1)(
5,1
2
1⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
+M
p
T
s
M
s
s
s
ms l
l
l
ll
φ
; )1( 1
2
1
2
2
l
l
l
l
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
+
=
M
ms
s
s
R
ω
et ωr=ωs-pΩ, la
pulsation des grandeurs rotoriques ;
srd
ms /33=
ω
; Tms=187 Nm
• s
ss
s
s
sIR
j
V
ω
φ
ω
+= avec msss IMI += l
φ
pour l’expression
du flux statorique.
Que pouvez-vous dire, pour l’expression du couple, de l’intérêt
de maintenir Vs/fs constant tant que
s
ss
sj
IR
ω
φ
>> ? Interprétez la
Figure 8.
5> En considérant une pulsation statorique ωs de 28rd/s, une
résistance statorique de 0.41 Ω et une valeur efficace du courant
de ligne de 13 A, pouvons nous considérer dans notre cas que
l’on vérifie l’inégalité ? On obtient en tenant compte de la
résistance statorique et de l’inductance de fuite statorique les
courbes de la Figure 9. Ce type de contrôle3 du variateur peut il
suffire ?
2 voir cours 1ere année
3 c’est un contrôle dit scalaire car il s’appuie seulement sur une expression de la valeur efficace du flux.
60%
30% 75% Ω
c
T
em
Vitesse
V
s
/f
s
= cte ⇒T
max
= cte
Figure 8
s
v
s
i
2
i
Mg
R2
2
l
S
R
« Stator » « Roto
r
»S
R : Résistance statorique
m
L
S
l
2
l
2
R
: Inductance ma
g
nétisante
: Inductance de fuites statoriques
: Inductance de fuites rotoriques ramenée
: Résistance rotorique ramenée
g : Glissement
S
l
Figure 7 : schéma monophasé équivalent de la machine asynchrone
Rs=0.41 Ω ; ls=2.8mH ; M=69.3mH ; l2=4.5 mH ; R2=0.23Ω; p=2; P=5,5 kW ; Vs : tension simple
Figure 9

15/10/2008
5
5> Il existe des variateurs à contrôle scalaire du flux pour lesquels on réalise une compensation des
chutes de tension « statorique ». Quelle grandeur faut-il mesurer pour les réaliser ?
6>Outre la possibilité d’imposer un couple statique à basses vitesses, le variateur doit être également
capable d’imposer le couple avec la dynamique requise. Avez-vous des éléments relatifs à cet aspect dans
la documentation de l’annexe ?
7> Analyser le document figure 10
B> Récupération d’énergie
Pour un ascenseur, il y a à chaque utilisation une phase où l’on doit freiner (Figure 11) avec donc
récupération possible d’énergie (cinétique ou potentielle).
Figure 11: extrait de VSDs-SAVE-Study-Final-Report.pdf
Figure 10
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%