Rapport de TP : Simulation Machine Asynchrone
Telechargé par
ablabouguerne rt bouguerne

Module Association Convertisseur s machines
Master I Automatique et systèmes
Enseignante Dr A. BOUGUERNE
1/2
TP_3_ Machine asynchrone (MAS)
1. Objet
Simulation d’une machine asynchrone alimentation directe par le réseau triphasé;
Simulation d’une machine asynchrone en boucle ouverte alimentée par le réseau triphasé à travers un
onduleur de tension à deux niveaux (variation de vitesse de la machine);
Simulation d’une machine asynchrone en boucle fermée alimentée par le réseau triphasé à travers un
onduleur de tension à deux niveaux (variation et régulation de la vitesse de la machine);
2. Théorie
Le moteur asynchrone est de beaucoup le moteur le plus utilisé dans l’ensemble des applications industrielles, du
fait de sa facilité de mise en œuvre, de son faible encombrement, de son bon rendement et de son excellente
fiabilité. Son seul point noir est l’énergie réactive, toujours consommée pour magnétiser l’entrefer.
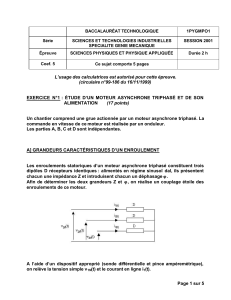
1ére Essai ( alimentation directe)
La machines asynchrone alimentée directement par le réseau
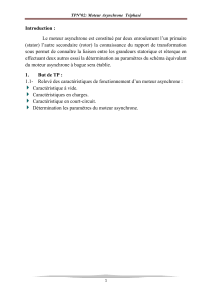
2éme Essai (variation de vitesse)
La machines asynchrone alimentée par le réseau à travers un redresseur-onduleur triphasés à commande
de modulation de largeur d’impulsion (MLI)

Module Association Convertisseur s machines
Master I Automatique et systèmes
Enseignante Dr A. BOUGUERNE
2/2
3éme Essai (Régulation de vitesse)
Commande vectorielle dite par orientation du flux rotorique de la machine asychrone
cette commande consiste à réécrire le modèle dynamique de la machine asynchrone dans un référentiel
tournant avec le flux du rotor. Par cette transformation non-linéaire et en maintien le flux du rotor
constant on arrive à assurer le découplage entre la vitesse et le flux de la machine. Elle permet d'obtenir un
fonctionnement comparable à celui de la machine à courant continu. Trois méthodes de découplage existent :
1 régulation du flux statorique,
2 flux rotorique et
3 flux d'entrefer du moteur asynchrone.
L’inconvénient de cette commande est le fonctionnement en mode survitesse où le découplage sera perdu.
Questions
Donner un rappel sur :
la constitution de la machine asynchrone a cage d’écureuil
la modélisation de la machine asynchrone (système triphasé et modèle de Park)
commande vectoriel à flux orienté de la machine asynchrone
Tracer pour chaque essai dont le fonctionnement à vide puis en charge (Cr=10Nm) :
1 Courants statorique
2 Courants rotorique
3 Vitesse de rotation et le couple électromagnétique
Pour le dernier essai, si on change la vitesse de référence à 120 rad/s, refaire les questions 1,2 et 3
Conclure
1
/
2
100%