Transmetteurs de mouvement : Engrenages, Poulies, Chaînes - Fiche
Telechargé par
The technical channel

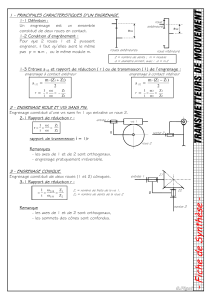
1 - PRINCIPALES CARACTERISTIQUES D’UN ENGRENAGE.
-
Fiche de S
y
nthèse
-
S.Pigot
TRANSMETTEURS DE MOUVEMENT
1-1 Définition :
roue
extérieure
Un engrenage est un ensemble
constitué de deux roues en contact.
ri
== =
12
1
ω
ω
Z
Z
1
2
Z = nombre de dent
s
; m = modul
e
d = diamètre
p
rimitif
,
ave
c
d = m.
Z
:
Z
1
= nombre de filets de la vis 1.
Z2
= nombre de dents de la roue 2
roue
2
vis 1
entrée 1
sortie
2
0
a1/2
roue intérieur
e
roues extérieure
s
a1/2
1-2 Condition d’engrènement :
Pour que 2 roues 1 et 2 puissent
engrener, il faut qu’elles aient le même
pas p = π.m , ou le même module m.
1-3 Entraxe a 1/2 et rapport de réduction ( r ) ou de transmission ( i ) de l’engrenage :
engrenage à contact extérieur engrenage à contact intérieur
a1/2 = a
1/2 =
m(Z Z)
2
12⋅+ m(Z Z)
2
21⋅−
r = 12
1
i==−
ω
ω
Z
Z
1
2 r = 12
1
i==
ω
ω
Z
Z
1
2
2 - ENGRENAGE ROUE ET VIS SANS FIN.
Engrenage constitué d’une vis sans fin 1 qui entraîne un roue 2.
2-1 Rapport de réduction r :
rapport de transmission i = 1/r
Remarques
- les axes de 1 et de 2 sont orthogonaux.
- engrenage pratiquement irréversible.
3 - ENGRENAGE CONIQUE.
Engrenage constitué de deux roues (1 et 2) côniques.
3-1 Rapport de réduction r :
r
Remarque
- les axes de 1 et de 2 sont orthogonaux,
- les sommets des cônes sont confondus.
i
Z
Z
== =
120
10
1
2
ω
ω
/
/
Z1
Z
2
entrée 1
sortie
2
0

1 - FONCTION TECHNIQUE REALISEE PAR UN SYSTEME POULIE-COURROIE.
-
Fiche de S
y
nthèse
-
Transmettre une énergie mécanique entre deux arbres parallèles en
modifiant ses caractéristiques (couple et fréquence de rotation).
S.Pigot
TRANSMETTEURS DE MOUVEMENT
2 - CARACTERISTIQUES CINEMATIQUES.
Poulie 2 réceptrice,
Diamètre d
2
,
Fréquence de rotation ω
2
,
Nombre de dents Z
2
,
Couple récepteur C
2
.
2-1 Raison (r) et couples de la transmission :
2
1
2
1
1
2
d
d
1Z
Z
i
r====
ω
ω
et
C
Cr
1
2
1
=.η
rapport de transmission i =1/r
η = rendement du système
2-2 Raison et couples d’une transmission à plusieurs poulies + courroies en séries :
menéespouliesdesdiamètresdesoduit
menantespouliesdesdiamètresdesoduit
i
re
s
Pr
Pr
1
0/
0/ ===
ω
ω
et
Ce
Cs r=.1
η
3 - CONDITIONS FONCTIONNELLES - SOLUTIONS CONSTRUCTIVES.
• Avantages :
silencieux,« grandes » vitesses de transmission,grand entraxe.
• Inconvénients :
durée de vie limitée, couple transmissible faible pour les courroies
plates, tension initiale de la courroie nécessaire pour garantir l’adhérence.
• Facteurs limitatifs : la vitesse de la chaîne et sa tension (ou charge maxima.).
• Tension de la chaîne :
a
-
Par seule déformation
élastique de la courroie lors
du montage.
(Micromécanique
).
4 - REPRESENTATION SCHEMATIQUE.
O*
O* : Indication supplémentaire éventuelle
Courroie crantée
O* →
Poulie 1 motrice,
Diamètre d
1
,
Fréquence de rotation ω
1
,
Nombre de dents Z
1
,
Couple moteur C
1
,
b -
Par variation réglable de
l’entraxe.
c -
Par utilisation d’un galet enrouleur
p
lacé sur le brin mo
u
Brin tendu
Brin mou
Galet tendeur

1 - FONCTION TECHNIQUE REALISEE PAR UNE TRANSMISSION PAR CHAINES.
-
Fiche de S
y
nthèse
-
S.Pigot
TRANSMETTEURS DE MOUVEMENT
CHAINE
Transmettre une énergie mécanique entre deux arbres parallèles en
modifiant ses caractéristiques (couple et fréquence de rotation).
PIGNON
2 - CARACTERISTIQUES CINEMATIQUES.
Poulie 1 motrice
Diamètre d
1
Fréquence de rotation ω
1
Nombre de dents Z
1
Couple moteur C
1
2-1 Raison (r) et couples de la transmission :
et
C
Cr
1
2
1
=.η
2
1
2
1
1
2
d
d
1Z
Z
i
r====
ω
ω
rapport de transmission = i =1/r
η = rendement du système
2-2 Raison et couples d’une transmission à plusieurs poulies + courroies en séries :
menéespouliesdesdiamètresdesoduit
menantespouliesdesdiamètresdesoduit
i
re
s
Pr
Pr
1
0/
0/ ===
ω
ω
et
Ce
Cs r=.1
η
3 - CONDITIONS FONCTIONNELLES - SOLUTIONS CONSTRUCTIVES.
• Avantages :
longue durée de vie, entraînement de plusieurs arbres recepteurs en
même temps, « basses » vitesses de transmission,(de 13 à 20 m/s pour les chaînes
silencieuses), supportent des conditions de travail plus rudes que les poulies-courroies..
• Inconvénients :
plus bruyantes, vitesses de rotation plus faibles, lubrification
nécessaire.
• Facteurs limitatifs :
la vitesse de la chaîne et sa tension (ou charge maxima.).
• Tension de la chaîne :
a -
Par variation réglable de l’entraxe,
b -
Par utilisation d’un galet enrouleur placé sur le brin mou
4 - REPRESENTATION SCHEMATIQUE.
Poulie 2 réceptrice
Diamètre d
2
Fréquence de rotation ω
2
Nombre de dents Z
2
Couple récepteur C
2
brin tendu
brin mou

1 - TRAIN D’ENGRENAGES.
-
Fiche de S
y
nthèse
-
S.Pigot
T
TRANSMETTEURS DE MOUVEMEN
Dans le cas de plusieurs engrenages en série, la raison r est égale à :
menéesrouesdesdprimitifdiamètresoudentsdenombreduoduit
menantesrouesdesdprimitifsdiamètresoudentsdenombreduoduit
k
i
e
s
e
N
s
N
r
)(Pr
)(Pr
.1
1
0/
0/
−====
ω
ω
-
nombre de contacts extérieurs entre roues = k,
- Le signe de r indique le sens de rotation,
- Le rapport de transmission est défini par : i = 1/r.
Exemple 1:
-
train à 4 engrenages ( 1-2 ;3-4 ;5-6 ;6-7 )
- 3 contacts ext. et 1 contact int. n = 3
- La roue 6 n’intervient pas dans le calcul (roue folle).
Exemple 2
:
-
train à 2 engrenages, comprenant un
engrenage cônique (roues 1 et 2).
2 - GROUPEMENT DE REDUCTEURS.
Pe
Ce
ωs/0
ω
3
0
/
ω
2
0
/
ω
e
/
0
Raison globale (r), rendement global (η), puissances ( Pe et Ps ) et couples ( Ce et Cs ):
rrr
s
e
==
ω
ω
/
/
..
0
0
123
r
ηηηη==
P
P
s
e
123
..
rC
C
e
s
η
=
r
C
C
C
C
P
P
e
s
ee
ss
e
s
ω
ω
η
⇔=== .
.
.
1
2
3
4
entré 1
Sortie
4
0
rn
n
ZZZZ
ZZZZ
ZZZ
ZZZ
===− =−
ω
ω
70
10
70
10
1356
2467
135
247
/
/
/
/
...
...
..
..
r,
η
Réducteur 1
r1, η1
Réducteur 2
r2, η2
Réducteur 3
r3, η3 Ps
C
s
7
1
2 3
4 5
6
entrée 1
sortie
7
0
rn
n
ZZ
ZZ
===
ω
ω
40
1
0
40
1
0
13
2
4
/
/
/
/
.
.
1
/
4
100%