Optique : Stigmatisme, Objets et Images - Cours Licence Physique
Telechargé par
nathanaelbounguele

1
•
Les espaces objets réel et virtuel ;
• Les espaces images réelle et virtuelles ;
• Le stigmatisme rigoureux et approché ;
• Les conditions de conservation du stigmatisme : Aplanétisme, condition d’Abbe,
de Herschel l et de Gauss.
COURS D’OPTIQUE/ Licence/Parcours Physique/Semestre 1 (S1)
Chapitre 3 : Stigmatisme. Notions d’objet et d’image
A la fin de ce chapitre, l’apprenant doit être capable de définir :
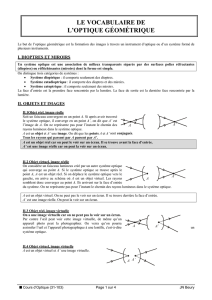
Un système optique peut être complexe, formé par des surfaces réfléchissantes
(miroirs) et des surfaces réfractantes (dioptres) destinées à fournir des images à partir
d’objets.
Le système est dit dioptrique s’il est formé uniquement par des dioptres, et il est
dit catadioptrique, s’il comporte aussi des miroirs.
Un système optique est donc un ensemble de milieux homogènes, transparents et
isotropes, ou réflecteurs. En pratique, les surfaces séparant ces milieux sont de forme
géométrique simple.
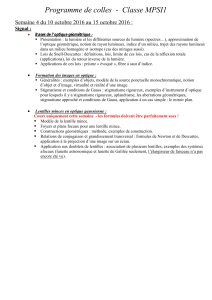
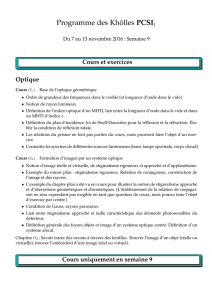
3.1. Espace objet et Espace image. Réalité et virtualité
Considérons un système optique composé de deux faces extrêmes
et
. Il
se compose alors :
- d’une face d’entrée
qui est la face par laquelle la lumière entre dans le système ;
- d’une face de sortie
qui est la face par laquelle la lumière sort du système.
Figure 1
L’espace objet réel est l’espace situé en avant de la face d’entrée de
. Tous les objets qui
s’y trouvent sont dits réels.
L’espace objet virtuel est l’espace qui se trouve en arrière (i.e. à droite) de la face de sortie de
. Tous les objets qui s’y trouvent sont dits virtuels.
L’espace image réelle est l’espace situé en arrière (i.e. à droite) de la face de sortie de
Toutes les images qui s’y trouvent sont dites réelles.
L’espace image virtuelle est l’espace qui se trouve en avant (i.e. à gauche) de la face d’entrée
de
.
Espace objet réel Espace objet virtuel
Espace image virtuelle Espace image réelle

2
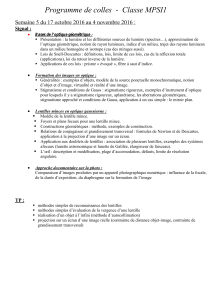
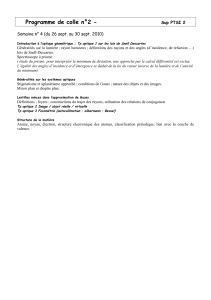
3.1.1. Objet réel ou virtuel
(a) (b)
Figure 2 :
Objets définis par rapport à la face d’entrée
(a) : Objet A réel ; (b) : Objet A virtuel
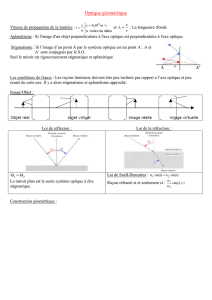
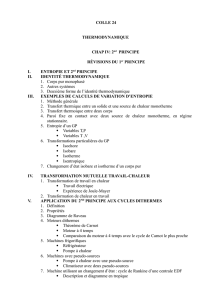
3.1.2. Image réelle ou virtuelle
(a) (b)
Figure 3:
Images définies par rapport à la face de sortie
(a) Image A’ réelle ; (b) Image A’ virtuelle
3.2. Stigmatisme
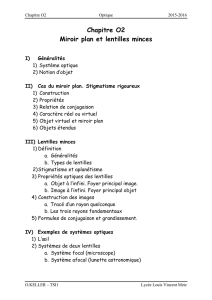
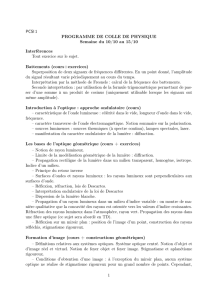
3.2.1. Définition du stigmatisme rigoureux
Si tous les rayons émis par un objet ponctuel réel A (ou qui forment un objet ponctuel virtuel
A) convergent à la sortie du système optique au même point A’ (ou divergent du même point
A’), on dit que le système optique est rigoureusement stigmatique pour le couple de points
A et A’.
Figure 4 : Condition de stigmatisme dans le cas: (a) d’un objet réel et d’une image réelle ;
(b) d’un objet réel et d’une image virtuelle
A l’exception des miroirs plans, tous les systèmes optiques sont, dans le meilleur des cas,
approximativement stigmatiques. Les rayons issus d’un point objet A émergent du système
en passant approximativement par le même point A’ ou en semblant provenir de A’.
A
A
A
A
A’
A’
A’
A’
(a)
(
b
)

3
D’après le principe de retour inverse de la lumière, tout rayon passant par A’ passe par A
après avoir traversé le système optique. On dit que les points A et A’ sont des points
conjugués par le système optique et la relation qui lie les positions relatives de A et A’ est
appelée la relation de conjugaison.
3.2.2. Condition du stigmatisme
1°) Cas d’un objet réel et d’une image réelle
Le système optique sépare deux milieux d’indice
et
. Le point objet A est dans le milieu
d’indice
et l’image A’ dans le milieu d’indice
.
Lorsque l’on considère la figure ci-dessus, tous les trajets joignant A et A’ par le système
optique sont effectivement suivi par la lumière. D’après le principe de Fermat, les chemins
optiques entre A et A’ sont tous extrémums donc égaux. On écrira alors :
′′ (3.1)
′
′ (3.2)
2°) Cas d’un objet réel et d’une image virtuelle
Définissons une surface d’onde Σ passant par le point Q. Nous avons :
(3.3)
(3.4)
A A’
I
J
A
A’
I
J
Q

4
En remarquant que la quantité () est la même pour tous les rayons du fait qu’elle se trouve
entre deux surfaces d’onde, il vient que :
′
′ (3.5)
On en déduit des équations (3.4) et (3.5) :
′
′
′
′
′ (3.6)
Pour calculer (), on voit que la partie virtuelle est affectée de l’indice
de l’espace image
et elle est comptée négativement. On peut donc utiliser la convention suivante qui englobe
tous les cas : Pour calculer le chemin optique entre deux points conjugués A et dans un
système optique, on oriente positivement les trajectoires dans le sens de propagation de la
lumière et on compte algébriquement les longueurs parcourues :
() =
(AI) + (IJ) +
() (3.7)
- Si A et A’ sont réels : (AI) = + et () = +
- Si A est réel et virtuelle : (AI) = + et () =
(3.8)
- Si A est virtuel et réelle : (AI) = et () =
- Si A est virtuel et virtuelle : (AI) = et () =
3.2.3. Exemples d’application. Stigmatisme rigoureux
1°) Réflexion
Considérons deux points A et A’. La lumière part de A, se réfléchit en I sur une surface et
passe par A’. Nous nous proposons de déterminer cette surface pour qu’elle soit stigmatique
pour le couple de points A et A’. Nous écrirons (quelque soit le point I) alors :
i) A et A’ sont réels
I
A A’
(
) = (AI) + (
) = n AI +
= cte
D’où : AI + = cte (3.9)
La surface est un ellipsoïde de révolution
de foyers A et A’. L’instrument est un
miroir elliptique.

5
ii) A réel et A’ virtuel
Lorsque la constante est nulle, on a :
AI = IA’ (3.11)
et le lieu de I est une médiatrice de AA’. L’instrument est alors un miroir plan.
iii) A réel et A’ à l’infini
Les rayons émergents sont des droites parallèles ; donc les surfaces d’onde sont des plans
d’après le théorème de Malus. Donc
(AIM) = cte
par définition des surfaces d’ondes :
Menons le plan parallèle à la surface d’onde à la distance :
Il vient :
(3.12)
Le lieu de I est un paraboloïde de révolution de foyer A. On l’utilise comme miroir du
télescope ou de projecteur.
I
A
A
’
I
(AIA’) = (AI) + (IA’) = nAI - nIA’ = cte
D’où : AI - IA’ = cte (3.10)
La surface est une hyperboloïde de
révolution de foyers A et A’. L’instrument
est un miroir hyperboloïde
A
H
M
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%