Tutoriel Mécaplan-Wips v2.10: Mécanisme de bridage pneumatique
Telechargé par
jalid.abdel

1 D. MERTZ - MP-Wips.doc
Initiation au logiciel Mécaplan-Wips v2.10
On utilise, comme support de travail, le schéma cinématique du mécanisme de bridage
pneumatique (voir les documents ci-joints). L’ordre des différents paragraphes de ce
document correspond à la démarche à adopter pour la création et la simulation d’un
mécanisme avec le logiciel Mécaplan-Wips.
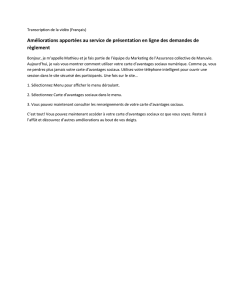
1. PRESENTATION DE L’ECRAN PRINCIPAL
Toute fonction en cours d’utilisation peut être interrompue par une action sur la
touche .
Dans la suite des paragraphes, nous allons montrer pas à pas l’utilisation du logiciel pour
la schématisation cinématique et statique d’une partie seulement du dispositif de bridage.
2. INITIALISATION DES PARAMETRES
Ouverture de session : Pour créer un nouveau mécanisme, sélectionnez l’option Nouveau
du menu Fichier ou cliquez l’icône de la barre d’outils
principale.
Remarque : Pour appeler un fichier existant, on sélectionnerait
l’option Ouvrir du menu Fichier ou on cliquerait l’icône
de la barre d’outils principale.
Sauvegarde : Définissez le nom de votre fichier de travail à l’aide de la fonction
Enregistrer sous du menu déroulant Fichier. Sauvegardez votre
fichier sur votre disquette sous le nom « bride.wgf ». Ce nom
apparaît en haut de l’écran. Il sera dorénavant utilisé, par le logiciel,
Barre d’outils
principale
Barre d’outils
secondaire
Barre d’outils
de contraintes
Zone de saisie
des données au
clavier
Ligne de message
p
our l’utilisateur
Limites de la
zone graphique
de travail
Menus déroulants
Touches de déplacement à
l’écran du cadre de travail
Augmentation ou diminution
du facteur Zoom
Attention
A
ffichage coordonnées. On
bascule de cartésiennes en
polaires par la touche

2 D. MERTZ - MP-Wips.doc
à chaque sauvegarde de votre travail quand vous utiliserez la
fonction Enregistrer du menu déroulant Fichier ou que vous
cliquerez sur l’icône de la barre d’outils principale.
Options générales : Pour définir les options de travail, cliquez l’icône de la barre
d’outils principale et exécutez les instructions ci-dessous :
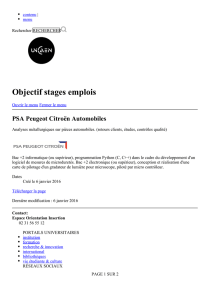
3. DEFINITION DE LA GEOMETRIE DU MECANISME
Nous nous contenterons, pour l’instant, de modéliser le
mécanisme ci-contre composé des seuls solides BATI et
BRIDE10.
Les dimensions sont données sur les documents joints.
3.1. Préparation des différents plans de travail
Sélectionnez l’icône « outils » de la barre d’outils principale, puis l’icône « gestion
des plans » de la barre de menu secondaire. Exécutez ensuite, dans l’ordre, les
instructions suivantes :
Définissez le cadre de travail par l’option
feuille et en saisissant les limites suivantes :
Choisissez la couleur de fond que vous voulez
(noir ou blanc)
Dévalidez l’affichage de la grille
1. Tapez, sans blanc ni caractère spécial, le nom
du premier système encastré à créer : BATI
2. Cliquez sur la case Nouveau pour
valider la création de votre plan.
3. Choisissez ensuite une couleur en cliquant
sur la case Couleu
r
.
4. Gardez le type de ligne CONTINU.
5. Pour affecter ces données au plan « BATI », sélectionnez
la ligne « BATI » de la fenêtre centrale (elle est alors
surlignée en bleu) et cliquez la case Modifier.
BRIDE10
BATI

3 D. MERTZ - MP-Wips.doc
Pour chacun des systèmes encastrés (ou pièces) qui constitue le mécanisme, on aura
intérêt à prévoir un plan (ou niveau de travail) différent (bien qu’à la limite, pour Mécaplan-Wips,
toutes les pièces puissent être dessinées sur le même plan ou qu’une pièce puisse être partagée
sur plusieurs plans).
Chaque pièce est formée par le tracé d’un ensemble d’entités élémentaires (segments, arcs
de cercle,…). Ces ensembles d’entités doivent être regroupés sous forme de blocs pour qu’ils
puissent être reconnus comme pièces par Mécaplan-Wips (cf. § 3.5 et 4.1).
Créez encore le plan de travail correspondant au système encastré BRIDE10 avant de
quitter la fonction (en cliquant la case « OK »). Pour ce plan, choisissez une couleur
différente de celle du plan BATI.
3.2. Tracé des pièces
Vous pouvez utilisez les fonctions du § 3.3 (zoom,…) et du § 3.4 (contraintes de tracé) en
même temps que les fonctions de tracé décrites ci-dessous.
Choix du plan de travail : Placez-vous sur le plan (ou niveau de travail) « BATI ». Pour
cela, sélectionnez ce plan dans la « liste des plans »
de la barre d’outils principale.
Tracé du segment : Sélectionnez la case « création d’objet » de la barre
d’outils principale.
Sélectionnez la case « Ligne » du menu secondaire qui
apparaît sous le menu principal.
Dans la zone de saisie des données en bas de l’écran,
saisissez les coordonnées (0,-20 suivi de ) de l’origine du
segment, puis celle de sont extrémité (0,0 suivi de )
Choix de la couleur
et du type de trait :
Remarque :
Lorsque l’option PLAN est sélectionnée dans le menu « liste des types
de lignes » et dans le menu « choix de la couleur
courante » de la barre principale de menu, les caractéristiques
du tracé sont celles que vous avez définies au moment de la création
du plan BATI.
Saisie des coordonnées :
Lorsqu’on entre des coordonnées au clavier, comme par
exemple pour le tracé du segment précédent, on a le choix
entre :
ª les coordonnées cartésiennes absolues mesurées par rapport
à l’origine fixe (0,0) de la feuille.
Exemple : 55,-16 où x=55mm et y=-16mm
Si vous désirez, changez
de type de trait, cliquez sur
le menu « liste des types
de lignes »
et faites votre choix
Si vous désirez,
changez de couleur
de trait, cliquez sur le
menu « choix de la
couleur courante »
et faites
votre choix
(0,-20)
(0,0)
La couleur activée
apparaît ici
Attention

4 D. MERTZ - MP-Wips.doc
ª les coordonnées polaires absolues mesurées par rapport à
l’origine fixe (0,0) de la feuille. Exemple : 32,<-15 (distance 32 mm de
l’origine et angle par rapport à l’horizontale –15°.
ª Les coordonnées cartésiennes relatives mesurées par rapport
au dernier point saisi (origine flottante).
Exemple : @55,0 on se déplace horizontalement de 55mm
ª les coordonnées polaires relatives mesurées par rapport au
dernier point saisi (origine flottante).
Exemple : @30,<45 on se déplace à 45° par rapport à l’horizontale, sur
une longueur de 30mm.
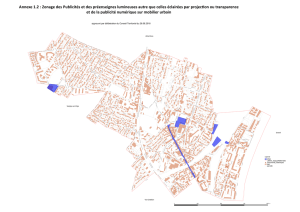
Utilisez ces diverses possibilités pour tracer, à partir de
l’origine et en trait mixte fin (avec une nouvelle couleur), les
traits d’axes du bâti : axe horizontal de longueur 180mm et axe
vertical de longueur 50mm
Tracé du cercle : Sélectionnez la case « Cercle par centre et rayon » du
menu secondaire. Pensez à repassez en couleur et type de
trait « plan ».
Dans la ligne de dialogue, saisissez successivement les
coordonnées du centre du cercle (0,0 suivi de ) et la
valeur de son rayon (2.5 suivi de )
Tracé du rectangle : Sélectionnez la case « Rectangle » du menu secondaire.
Dans la ligne de dialogue, saisissez successivement les
coordonnées des points situés sur la diagonale du rectangle
(-5,-20 suivi de et 5,-25 suivi de )
Hachurage: Sélectionnez le menu « Outils » de la barre d’outils
principale. Choisissez la case « Hachurage » de la barre
d’outils secondaire qui s’affiche.
Sélectionnez le rectangle, puis cliquez sur la touche droite de
la souris pour arrêter la saisie des entités. Un menu apparaît
alors à l’écran. Indiquez un angle de hachurage de 45° et un
espace entre hachures de 1 mm.
3.3. Utilitaires à utiliser conjointement aux autres fonctions
Modification des
attributs d’une
entité :
ª Changement de
plan
ª Changement de
couleur
ª Changement de
type de trait
ª Changement
d’épaisseur
Sélectionnez la fonction « changement des attributs d’une entité »
du menu principal « Outils » .
Sélectionnez la ou les entités à modifier. Arrêtez la sélection avec la
touche droite de la souris.
La fenêtre ci-dessous apparaît :
Tracez les axes
dans une nouvelle
couleur et en trait
mixte fin
Sélectionnez le type de
paramètres à changer
Définissez la
nouvelle valeur
des paramètres
Validez vos choix

5 D. MERTZ - MP-Wips.doc
Zoom : Pensez à utiliser les fonctions « zooms » disponibles dans le menu
« gestion de l’écran » de la barre d’outils principale :
« Diminution du facteur zoom»
« Zoom fenêtre »
« Zoom aux limites ». Ce sont les
limites de la fenêtre de travail définies dans
les « options générales » qui sont
affichées à l’écran.
« Panoramique ». Mécaplan
déplace le tracé à l’écran, sans changer de
facteur de zoom. Désignez deux points à
l’écran pour définir le vecteur translation.
« Augmentation du facteur zoom»
« Zoom précédent ». Tous les
zooms sont mémorisés. On peut revenir au
premier zoom.
« Zoom étendu ». L’ensemble de
ce qui est tracé, même en dehors des
limites du dessin, rempli au mieux l’écran.
« Donnez un point de passage de
la grille »
Effacement : En cas d’erreur de tracé, il est possible d’effacer des entités en utilisant la
fonction « Effacer des entités » de la barre d’outils principale.
Sélectionnez les entités à l’écran, puis cliquez sur la touche de droite de
la souris pour les effacer.
Rafraîchissement
d’écran :
A
près avoir utilisé certaines fonctions (effacement,…), rafraîchissez
l’écran en utilisant la fonction « Redessine » de la barre d’outils
principale.
Sauvegardes : Faites régulièrement des sauvegardes de votre travail, soit en utilisant
l’option Enregistrer du menu déroulant Fichier, Soit en cliquant sur
l’icône de la barre d’outils principale.
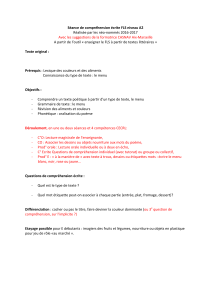
3.4. Utilisation du menu contraintes de tracé
Les contraintes de tracé sont des fonctions qui sont utilisées conjointement à d’autres
fonctions (tracé, découpe,…) pour servir de calage précis sur des points particuliers du
dessin.
Inactivation des contraintes
Contrainte « extrémité »
Contrainte « Centre »
Contrainte « proximité ». Calage su le point le
plus proche du curseur situé sur une entité
Contrainte « quadrant ». Calage sur l’un des
quatre points d’un cercle, aligné horizontalement ou
verticalement avec le centre du cercle
Contrainte « nodale ». Calage sur un point
(ou nœud) créé à l’aide de la fonction .
Contrainte « milieu »
Contrainte « intersection »
Contrainte « perpendiculaire »
Contrainte « texte ». Calage sur le point
origine d’un texte.
Contrainte « grille »
Contrainte « orthogonale »
(calage horizontal ou vertical)
Nous allons utiliser le menu « Contraintes de tracé » pour notre exemple :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%