Cours Résistance des Matériaux - Contraintes et Déformations
Telechargé par
el mehdi monsif

COURS
de Resistance Des Materiaux
Laurent Deshayes

Cours de Résistance des Matériaux - 2019/2020
Laurent DESHAYES
1
Table des matières
1 INTRODUCTION ET GENERALITES ..............................................................................4
1.1 CONTRAINTES NORMALES ET TANGENTIELLES .................................................................4
1.1.1 Contraintes normales ...............................................................................................4
1.1.2 Contrainte tangentielle .............................................................................................4
1.2 HYPOTHESES DE LA RESISTANCE DES MATERIAUX ..........................................................5
1.2.1 Hypothèse fondamentale (Loi de HOOKE) ..............................................................5
1.2.2 Le matériau ..............................................................................................................5
1.2.3 La forme (ou disposition de la matière) ....................................................................5
1.2.4 Les forces extérieures ...............................................................................................6
1.2.5 Les déformations ......................................................................................................6
1.2.6 Validité des résultats en résistance des matériaux ....................................................6
2 TORSEUR DES EFFORTS DE COHESION REDUITS AU CENTRE DE LA
COUPURE ........................................................................................................................................7
3 SOLLICITATIONS SIMPLES, SOLLICITATIONS COMPOSEES .................................7
3.1 SOLLICITATIONS SIMPLES.................................................................................................8
3.1.1 Traction (extension) .................................................................................................8
3.1.2 Compression ............................................................................................................8
3.1.3 Cisaillement .............................................................................................................8
3.1.4 Torsion ....................................................................................................................8
3.1.5 Flexion simple ..........................................................................................................9
3.2 SOLLICITATIONS COMPOSEES ...........................................................................................9
4 TRACTION ......................................................................................................................... 10
4.1 DEFINITION .................................................................................................................... 10
4.2 CONTRAINTE NORMALE DANS UNE SECTION DROITE....................................................... 10
4.3 CONDITIONS DE RESISTANCE .......................................................................................... 10
4.4 DEFORMATIONS ............................................................................................................. 11
4.5 INFLUENCE DES VARIATIONS DE SECTION ....................................................................... 11
5 COMPRESSION ................................................................................................................. 13
5.1 DEFINITION .................................................................................................................... 13
5.2 DEFORMATIONS ET CONTRAINTE.................................................................................... 13
5.3 APPLICATION ................................................................................................................. 13
6 CISAILLEMENT ................................................................................................................ 14
6.1 DEFINITION .................................................................................................................... 14
6.2 CONTRAINTE MOYENNE DE CISAILLEMENT ..................................................................... 14
6.3 CONDITION DE RESISTANCE ........................................................................................... 15
6.4 APPLICATIONS ............................................................................................................... 15
7 DETERMINATION EXPERIMENTALE DES CARACTERISTIQUES MECANIQUES
DES MATERIAUX ......................................................................................................................... 17
7.1 ESSAI DE TRACTION ....................................................................................................... 17
7.2 ANALYSE DE LA COURBE CONTRAINTE-DEFORMATION ................................................... 17
7.3 LIMITE ELASTIQUE ......................................................................................................... 17
7.4 MODULE D'ELASTICITE LONGITUDINALE OU MODULE DE YOUNG E. ............................... 17
7.5 COEFFICIENT DE POISSON .............................................................................................. 18
7.6 ZONE DES DEFORMATIONS PERMANENTES ...................................................................... 18
7.6.1 Résistance à la rupture ........................................................................................... 18

Cours de Résistance des Matériaux - 2019/2020
Laurent DESHAYES
2
7.6.2 Coefficient d'allongement ....................................................................................... 18
8 MOYEN D’ETUDE EXPERIMENTALE DES DEFORMATIONS ET DES
CONTRAINTES ............................................................................................................................. 19
8.1 VERNIS CRAQUELANTS .................................................................................................. 19
8.2 PHOTOELASTICIMETRIE .......................................................................................... 19
8.3 EXTENSOMETRIE ELECTRIQUE........................................................................................ 19
8.4 LES OUTILS INFORMATIQUES .......................................................................................... 20
9 TORSION ............................................................................................................................ 21
9.1 DEFINITION .................................................................................................................... 21
9.2 HYPOTHESES ................................................................................................................. 21
9.3 CONSTATATION EXPERIMENTALE ................................................................................... 21
9.4 CONTRAINTES TANGENTIELLES ...................................................................................... 22
9.5 DEFORMATION ANGULAIRE UNITAIRE ......................................................................... 23
9.6 CONDITIONS DE RESISTANCE .......................................................................................... 24
9.7 CONDITIONS REELLES, CAS DES CONCENTRATIONS DE CONTRAINTES ............................. 24
9.8 APPLICATION ................................................................................................................. 25
10 FLEXION SIMPLE ......................................................................................................... 27
10.1 DEFINITION ................................................................................................................ 27
10.2 SCHEMATISATION DES LIAISONS................................................................................. 27
10.3 PROPRIETES: .............................................................................................................. 28
10.4 TORSEUR DE COHESION .............................................................................................. 28
10.5 EXPRESSION DU MOMENT FLECHISSANT ET DE L'EFFORT TRANCHANT......................... 29
10.5.1 Actions aux appuis ................................................................................................. 29
10.5.2 Equilibre d'un tronçon quelconque de la poutre ..................................................... 29
10.5.3 Effort tranchant ..................................................................................................... 29
10.5.4 Moment fléchissant ................................................................................................ 30
10.5.5 Variation de T et de Mf......................................................................................... 30
10.5.6 Relation liant T à Mf .............................................................................................. 30
10.6 CONTRAINTE NORMALE EN UN POINT QUELCONQUE D'UNE SECTION DROITE ............... 32
10.6.1 Elément mathématique: courbure en un point d'une courbe .................................... 32
10.6.2 Expression de la contrainte normale ...................................................................... 32
10.6.3 Contrainte maximale - condition de résistance ....................................................... 33
10.7 CONTRAINTE TANGENTIELLE MOYENNE: MOY ........................................................... 34
10.8 CONCENTRATIONS DE CONTRAINTES .......................................................................... 34
10.9 ETUDE DES CAS DE FLEXION SIMPLE ........................................................................... 36
10.9.1 Poutre sur deux appuis charge concentrée en un point quelconque. ........................ 36
10.9.2 Poutre sur deux appuis avec charge uniformément répartie .................................... 37
10.9.3 Poutre encastrée avec charge ponctuelle en son extrémité ...................................... 38
10.9.4 Poutre encastrée avec charge répartie ................................................................... 38
10.10 ETUDE DE LA DEFORMEE Y= F(X) ............................................................................... 39
10.10.1 Définition ........................................................................................................... 39
10.10.2 Calcul par intégration ........................................................................................ 39
10.10.3 Application à un exemple ................................................................................... 39
10.11 PRINCIPE DE SUPERPOSITION ...................................................................................... 40
10.11.1 Enoncé: .............................................................................................................. 40
10.11.2 Utilisation de ce principe ................................................................................... 40
11 FLEXION DEVIEE ......................................................................................................... 42
11.1 DEFINITION ................................................................................................................ 42
11.2 METHODE DE RESOLUTION ......................................................................................... 42

Cours de Résistance des Matériaux - 2019/2020
Laurent DESHAYES
3
12 SOLLICITATIONS COMPOSEES ................................................................................ 43
12.1 CONTRAINTES DE MEME NATURE ............................................................................... 43
12.2 CONTRAINTES DE NATURE DIFFERENTE ...................................................................... 43
12.3 APPLICATION: ............................................................................................................ 44
13 FLAMBAGE, FLAMBEMENT ...................................................................................... 46
13.1 DEFINITION ................................................................................................................ 46
13.2 CHARGE CRITIQUE D’EULER (SEUL LA THEORIE DU FAMBEMENT SELON EULER SERA
DEVELOPPEE ICI) ........................................................................................................................... 46
13.3 ELANCEMENT ............................................................................................................ 47
13.4 CONTRAINTE CRITIQUE .............................................................................................. 47
13.5 ELANCEMENT CRITIQUE ............................................................................................. 48
13.6 CHARGE MAXIMALE ADMISSIBLE ............................................................................... 48
14 MOMENT STATIQUE ET MOMENT QUADRATIQUE D’UNE SURFACE PLANE
PAR RAPPORT A UN AXE .......................................................................................................... 49
14.1 MOMENT STATIQUE D'UNE SURFACE PLANE PAR RAPPORT A UN AXE SITUE DANS SON
PLAN 49
14.2 THEOREME ................................................................................................................. 49
14.3 MOMENT QUADRATIQUE D'UNE SURFACE PAR RAPPORT A UN AXE SITUE DANS SON
PLAN 50
14.3.1 Définition ............................................................................................................... 50
14.3.2 Unités .................................................................................................................... 50
14.3.3 Théorème de Huygens ............................................................................................ 51
14.4 MOMENT QUADRATIQUE POLAIRE D'UNE SURFACE PLANE PAR RAPPORT A UN AXE
PERPENDICULAIRE A CETTE DERNIERE ........................................................................................... 52
14.4.1 Définition ............................................................................................................... 52
14.4.2 Relation liant Ixx', Iyy' et Io .................................................................................... 52
14.5 APPLICATION ............................................................................................................. 53
14.5.1 Moment quadratique d'un rectangle par rapport à un axe confondu avec un côté ... 53
14.5.2 Moment quadratique d'un rectangle par rapport à un axe parallèle à un côté passant
par le centre de gravité de la surface ........................................................................................ 53
14.5.3 Moment quadratique, par rapport à un axe, de surface décomposables en rectangles
54
14.5.4 Moment quadratique polaire d'un rectangle par rapport au centre de gravité ......... 56
14.5.5 Moment quadratique polaire d'un cercle dont le pôle est confondu avec le centre ... 56

Cours de Résistance des Matériaux - 2019/2020
Laurent DESHAYES
4
1 Introduction et généralités
Sous l'effet de ces diverses actions, les solides se déforment, plus ou moins, ce qui crée à l'intérieur
du solide des contraintes.
Lorsque ces contraintes deviennent supérieures à une valeur maximale que peut supporter le
matériau, il y a rupture. Si, par contre, ces contraintes restent en dessous d'une valeur qu'on appelle
limite élastique, les solides se déforment mais reprennent leur forme initiale dès que les actions
cessent.
L'objet de la résistance des matériaux (RDM) est de mettre en relation, les contraintes, les efforts et
les déformations. En outre, la RDM a trois objectifs principaux :
• la connaissance des caractéristiques mécaniques des matériaux.
• (comportement sous l’effet d’une action mécanique)
• l'étude de la résistance des pièces mécaniques.
• (résistance ou rupture)
• l'étude de la déformation des pièces mécaniques.
Ces études permettent de choisir le matériau et les dimensions d'une pièce mécanique en fonction
des conditions de déformation et de résistance requises.
1.1 Contraintes normales et tangentielles
1.1.1 Contraintes normales
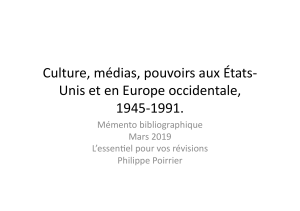
prenons un fil et exerçons sur lui deux efforts qui sont opposés.
Si nous coupons par la pensée ce fil, il est
facile d'imaginer que la section de droite
exerce sur la section de gauche, un ensemble
de forces élémentaires
f
dont la somme
s’oppose à
F
Si l'on considère une portion de surface s
qui a pour aire l'unité (ex : le mm²), cette portion
de surface subit de la part de sa voisine de droite
une force
f
qui a "tendance à la décoller"
Définition : On appelle contrainte normale et
l'on note
, la valeur
f
s
:
est en Newtons/mm2 ou MPa (Méga Pascal).
1.1.2 Contrainte tangentielle
Maintenant au lieu de tirer sur le fil, nous allons le couper avec une cisaille.
→
F
→
-F
→
F
f
f
⊥
s
(
)
s
f
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
1
/
61
100%