Intégration sur un segment : fonctions continues par morceaux & sommes de Riemann
Telechargé par
Shrimplovingshit 421

- 1 / 8 -
a
b
a
0
a
1
a
2
a
3
a
b
a
0
a
1
a
2
a
3
I
In
nt
té
ég
gr
ra
at
ti
io
on
n
s
su
ur
r
u
un
n
s
se
eg
gm
me
en
nt
t
I
I.
.
F
Fo
on
nc
ct
ti
io
on
ns
s
c
co
on
nt
ti
in
nu
ue
es
s
p
pa
ar
r
m
mo
or
rc
ce
ea
au
ux
x
Soit
a b
< ∈
ℝ
.
1
1°
°)
)
S
Su
ub
bd
di
iv
vi
is
si
io
on
n
d
d’
’u
un
n
s
se
eg
gm
me
en
nt
t
Déf : On appelle subdivision d’un segment
[
]
,
a b
, toute famille finie de réels
0 1
( , ,..., )
n
a a a
σ
=
telle que :
0 1
...
n
a a a a b
= < < < =
.
Les
i
a
sont alors appelés points de subdivision et les
]
[
1
,
i i
a a
−
sont appelés intervalles de subdivision.
Déf : Soit
0 1
( , ,..., )
n
a a a
σ
=
une subdivision de
[
]
,
a b
.
On appelle pas de la subdivision
σ
le réel
1
1
( ) max( )
i i
i n
p a a
σ
−
≤ ≤
= −
.
Déf : Soit
0 1
( , ,..., )
n
a a a
σ
=
une subdivision de
[
]
,
a b
. On appelle support de
σ
l’ensemble :
{
}
0 1
Supp( ) , ,..., n
a a a
σ
=
.
Déf : Soit
σ
et
σ
′
deux subdivisions de
[
]
,
a b
. On dit que
σ
est plus fine que
σ
′
ssi
Supp( ) Supp( )
σ σ
′
⊂
.
Déf : Soit
1
σ
et
2
σ
deux subdivisions de
[
]
,
a b
. On appelle réunion de
1
σ
et
2
σ
la subdivision
σ
de support
1 2
Supp( ) Supp( )
σ σ
∪
.
2
2°
°)
)
F
Fo
on
nc
ct
ti
io
on
n
e
en
n
e
es
sc
ca
al
li
ie
er
r
Déf : Une fonction
[
]
: ,
f a b
→
ℝ
est dite en escalier ssi il existe
0 1
( , ,..., )
n
a a a
σ
=
subdivision de
[
]
,
a b
pour laquelle :
1
i n
∀ ≤ ≤
,
f
est constante sur
]
[
1
,
i i
a a
−
.
Cette subdivision
σ
est alors dite adaptée à
f
.
Déf :
On note
[
]
( , , )
a b
E
ℝ
l’ensemble de ces fonctions.
Prop :
Soit
[
]
, : ,
f g a b
→
ℝ
et
λ
∈
ℝ
. Si
f
et
g
sont en escalier alors
. , , ,
f f g fg f
λ
+
le sont aussi.
3
3°
°)
)
F
Fo
on
nc
ct
ti
io
on
n
c
co
on
nt
ti
in
nu
ue
e
p
pa
ar
r
m
mo
or
rc
ce
ea
au
ux
x
Déf :
Une fonction
[
]
: ,
f a b
→
ℝ
est dite continue par morceaux ssi
il existe
0 1
( , ,..., )
n
a a a
σ
=
subdivision de
[
]
,
a b
pour laquelle :
1
i n
∀ ≤ ≤
,
f
est continue sur
]
[
1
,
i i
a a
−
et
1
1 ,lim ,lim
i i
a a
i n f f
+ −
−
∀ ≤ ≤
existent et sont finies.
La subdivision
σ
est alors dite adaptée à la fonction
f
.
Déf :
On note
[
]
0
( , , )
pm
a b
C
ℝ
l’ensemble de ces fonctions.
Prop :
Soit
[
]
, : ,
f g a b
→
ℝ
et
λ
∈
ℝ
.
Si
f
et
g
sont continues par morceaux alors
. , , ,
f f g fg f
λ
+
le sont aussi.
Prop :
Toute fonction continue par morceaux sur
[
]
,
a b
y est bornée.
4
4°
°)
)
A
Ap
pp
pr
ro
ox
xi
im
ma
at
ti
io
on
n
p
pa
ar
r
d
de
es
s
f
fo
on
nc
ct
ti
io
on
ns
s
e
en
n
e
es
sc
ca
al
li
ie
er
r
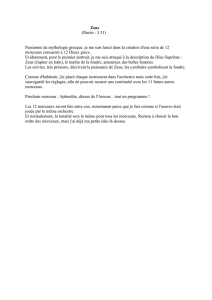
Théorème :
Soit
[
]
: ,
f a b
→
ℝ
continue par morceaux.
[
]
0, , ( , , )
a b
ε ϕ ψ
∀ > ∃ ∈
E
ℝ
telles que
0
f
ϕ ψ
ψ ϕ ε
≤ ≤
≤ − ≤
.
p
(
)
σ
a
4
a
3
a
2
a
1
a
0
b
a
y
x
=
ψ
(
)
y
f
x
=
(
)
y
x
=
ϕ
(
)
a
x
b
ε

- 2 / 8 -
a
b
a
0
a
1
a
2
a
3
h
1
h
2
h
3
a
b
Γ
ϕ
Γ
f
a
b
Γ
ψ
Γ
f
I
II
I.
.
C
Co
on
ns
st
tr
ru
uc
ct
ti
io
on
n
d
de
e
l
l’
’i
in
nt
té
ég
gr
ra
al
le
e
1
1°
°)
)
I
In
nt
té
ég
gr
ra
al
le
e
d
d’
’u
un
ne
e
f
fo
on
nc
ct
ti
io
on
n
e
en
n
e
es
sc
ca
al
li
ie
er
r
Soit
a b
< ∈
ℝ
.
a
a)
)
d
dé
éf
fi
in
ni
it
ti
io
on
n
Soit
[
]
: ,
f a b
→
ℝ
une fonction en escalier. Soit
0
( ,..., )
n
a a
σ
=
une subdivision adaptée à
f
.
1
i n
∀ ≤ ≤
, posons
i
h
la valeur de
f
sur
]
[
1
,
i i
a a
−
. On pose
1
1
( ) ( )
n
i i i
i
I f h a a
σ−
=
= −
∑
.
On peut montrer que
( )
I f
σ
est indépendante de la subdivision
σ
adaptée à
f
choisie.
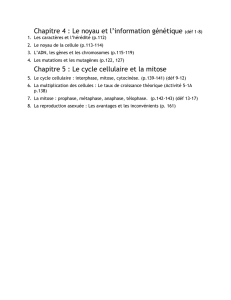
Déf :
Cette quantité est appelée intégrale de la fonction en escalier
f
sur
[
]
,
a b
. On la note
[ ]
,
( )
a b
I f
.
b
b)
)
p
pr
ro
op
pr
ri
ié
ét
té
és
s
Prop :
Soit
[
]
, : ,
f g a b
→
ℝ
en escalier et
λ
∈
ℝ
.
[ ] [ ]
, ,
( . ) . ( )
a b a b
I f I f
λ λ
=
et
[ ] [ ] [ ]
, , ,
( ) ( ) ( )
a b a b a b
I f g I f I g
+ = +
.
Prop :
Soit
[
]
, : ,
f g a b
→
ℝ
en escalier.
Si
0
f
≥
alors
[ ]
,
( ) 0
a b
I f
≥
.
Si
f g
≤
alors
[ ] [ ]
, ,
( ) ( )
a b a b
I f I g
≤
.
Prop :
Soit
[
]
: ,
f a b
→
ℝ
en escalier et
]
[
,
c a b
∈
.
[ ] [ ] [ ]
, , ,
( ) ( ) ( )
a b a c c b
I f I f I f
= +
.
2
2°
°)
)
D
Dé
éf
fi
in
ni
it
ti
io
on
n
d
de
e
l
l’
’i
in
nt
té
ég
gr
ra
al
le
e
d
d’
’u
un
ne
e
f
fo
on
nc
ct
ti
io
on
n
c
co
on
nt
ti
in
nu
ue
e
p
pa
ar
r
m
mo
or
rc
ce
ea
au
ux
x.
.
Soit
a b
< ∈
ℝ
et
[
]
: ,
f a b
→
ℝ
continue par morceaux.
Notons :
[
]
{
}
( , , )/
a b f
ϕ ϕΦ = ∈ ≤Eℝ
et
[
]
{
}
( , , )/a b f
ψ ψ
Ψ = ∈ ≤Eℝ
.
Posons
[ ]
{
}
,
( )/
a b
I I
ϕ ϕ
−
= ∈Φ
et
[ ]
{
}
,
( )/
a b
I I
ψ ψ
+
= ∈ Ψ
.
On montre l’existence et l’égalité de
sup
I
−
et de
inf
I
+
.
Déf :
Cette valeur commune est appelée intégrale de
f
sur
[
]
,
a b
. On la note
[ ]
,a b
f
∫
ou
[ ]
,
( )d
a b
f t t
∫
.
3
3°
°)
)
P
Pr
ro
op
pr
ri
ié
ét
té
és
s
d
de
e
l
l’
’i
in
nt
té
ég
gr
ra
al
le
e
Soit
a b
< ∈
ℝ
.
a
a)
)
l
li
in
né
éa
ar
ri
it
té
é
Théorème :
Soit
[
]
, : ,
f g a b
→
ℝ
continues par morceaux et
λ
∈
ℝ
.
[ ] [ ]
, ,a b a b
f f
λ λ=
∫ ∫
et
[ ] [ ] [ ]
, , ,a b a b a b
f g f g
+ = +
∫ ∫ ∫
.
Cor :
Si
f g
=
sauf en un nombre fini de points alors
[ ] [ ]
, ,a b a b
f g
=
∫ ∫
.
b
b)
)
c
cr
ro
oi
is
ss
sa
an
nc
ce
e
Théorème :
Soit
[
]
, : ,
f g a b
→
ℝ
continues par morceaux
Si
0
f
≥
alors
[ ]
,
0
a b
f
≥
∫
.
Si
f g
≤
alors
[ ] [ ]
, ,a b a b
f g
≤
∫ ∫
.
Cor :
Soit
[
]
: ,
f a b
→
ℝ
continue par morceaux. On a
[ ] [ ]
, ,a b a b
f f
≤
∫ ∫
.
c
c)
)
r
re
el
la
at
ti
io
on
n
d
de
e
C
Ch
ha
as
sl
le
es
s
Théorème :
Soit
[
]
: ,
f a b
→
ℝ
continue par morceaux et
]
[
,
c a b
∈
.
[ ] [ ] [ ]
, , ,a b a c c b
f f f
= +
∫ ∫ ∫
.

- 3 / 8 -
Γ
f
a
µ
(
)
f
b
d
d)
)
i
in
né
ég
ga
al
li
it
té
é
d
de
e
l
la
a
m
mo
oy
ye
en
nn
ne
e
Déf :
Soit
[
]
: ,
f a b
→
ℝ
continue par morceaux.
On appelle valeur moyenne de
f
sur
[
]
,
a b
le réel
[ ]
,
1
( )
a b
f f
b a
µ=
−
∫
.
Théorème :
(inégalité de la moyenne)
Soit
[
]
, : ,
f g a b
→
ℝ
continues par morceaux.
[ ] [ ] [ ]
, ,
,
sup
a b a b
a b
fg f g
≤
∫ ∫
.
e
e)
)
i
in
né
ég
ga
al
li
it
té
é
d
de
e
C
Ca
au
uc
ch
hy
y
S
Sc
ch
hw
wa
ar
rz
z
Prop :
Soit
[
]
, : ,
f g a b
→
ℝ
continues.
[ ] [ ] [ ]
22 2
, , ,
( ) ( ) ( ) ( )
a b a b a b
f t g t t f t t g t t
≤
∫ ∫ ∫
d d d
.
4
4°
°)
)
E
Ex
xt
te
en
ns
si
io
on
n
Soit
I
un intervalle de
ℝ
.
Déf :
Une fonction
:
f I
→
ℝ
est dite continue par morceaux ssi
f
est continue par morceaux sur tout segment
[
]
,
a b
avec
a b I
< ∈
. On note
0
( , )
pm
I
C
ℝ
l’ensemble de ces fonctions.
Déf :
Soit
:
f I
→
ℝ
continue par morceaux et
,
a b I
∈
.
On définit
b
a
f
∫
(ou encore
( )d
b
a
f t t
∫
) par :
[ ]
[ ]
,
,
si
0 si
si
a b
b
a
b a
f a b
f a b
f a b
<
= =
− >
∫
∫
∫
Théorème :
Soit
, :
f g I
→
ℝ
continues par morceaux et ,
λ µ
∈
ℝ
.
Pour tout
,
a b I
∈
on a
b b b
a a a
f g f g
λ µ λ µ+ = +
∫ ∫ ∫
.
Théorème :
Soit
:
f I
→
ℝ
continue par morceaux et
, ,
a b c I
∈
.
b c b
a a c
f f f
= +
∫ ∫ ∫
.
I
II
II
I.
.
P
Pr
ri
im
mi
it
ti
iv
ve
es
s
e
et
t
i
in
nt
té
ég
gr
ra
al
le
es
s
Soit
I
un intervalle non singulier
1
1°
°)
)
P
Pr
ri
im
mi
it
ti
iv
ve
es
s
d
d’
’u
un
ne
e
f
fo
on
nc
ct
ti
io
on
n
Déf :
On appelle primitive d’une fonction
:
f I
→
ℝ
, s’il en existe, toute fonction
:
F I
→
ℝ
dérivable telle
que
F f
′
=
.
Prop :
Si
:
f I
→
ℝ
admet une primitive
F
alors l’ensemble des primitives de
f
est constitué des fonctions de
la forme
( )
t F t C
+
֏
avec
C
∈
ℝ
Déf :
On note :
( )d ( )
te
f t t F t C
= +
∫
pour signifier que
F
est une primitive de
f
et pour
Prop :
Soit
, :
f g I
→
ℝ
et ,
λ µ
∈
ℝ
.
Si
F
et
G
sont primitives de
f
et
g
alors
F G
λ µ
+
est primitive de
f g
λ µ
+
. Ainsi
( ) ( )d ( )d ( )d
f t g t t f t t g t t
λ µ λ µ+ = +
∫ ∫ ∫
.

- 4 / 8 -
2
2°
°)
)
P
Pr
ri
im
mi
it
ti
iv
ve
es
s
d
de
e
f
fo
on
nc
ct
ti
io
on
ns
s
u
us
su
ue
el
ll
le
es
s
( )
f t
( )d
f t t
∫
I
n
t
avec
n
∈
ℕ
1
1
n
te
t
C
n
++
+
ℝ
1
n
t
avec
{
}
\ 0,1
n
∈
ℕ
1
1 1
1
te
n
C
n
t
−
− +
−
*
+
ℝ
ou
*
−
ℝ
t
α
avec
{
}
\ 1
α
∈ −
ℝ
11
te
t C
α
α
+
+
*
+
ℝ
1
t
ln
te
t C
+
*
+
ℝ
ou
*
−
ℝ
e
t
e
t te
C
+
ℝ
ln
t
ln
te
t t t C
− +
*
+
ℝ
sin
t
cos
te
t C
− +
ℝ
cos
t
sin
te
t C
+
ℝ
sh
t
ch
te
t C
+
ℝ
ch
t
sh
te
t C
+
ℝ
2
1
1
t
+
arctan
te
t C
+
ℝ
2
1
1
t
−
1 1
ln
2 1
te
t
C
t
+
+
−
]
[
]
[
, 1 , 1,1
−∞ − −
et
]
[
1,
+∞
2
1
1
t
−
arcsin
te
t C
+
]
[
1,1
−
2
1
1
t
+
2
ln( 1)
te
t t C
+ + +
ℝ
2
1
1
t
−
2
ln 1
te
t t C
+ − +
]
]
, 1
−∞ −
et
[
[
1,
+∞
3
3°
°)
)
I
In
nt
té
ég
gr
ra
at
ti
io
on
n
p
pa
ar
r
p
pr
ri
im
mi
it
ti
iv
va
at
ti
io
on
n
Théorème :
Soit
:
f I
→
ℝ
une fonction continue et
a I
∈
.
f
possède une unique primitive qui s’annule en
a
, c’est la fonction
( )d
x
a
x f t t
∫
֏
.
Cor :
Toute fonction réelle continue sur un intervalle
I
y admet des primitives.
Cor :
Soit
:
f I
→
ℝ
continue et
F
une primitive de
f
.
[ ]
, , ( )d ( ) ( ) ( )
b
b
a
a
a b I f t t F t F b F a
∀ ∈ = = −
∫
.
4
4°
°)
)
P
Po
os
si
it
ti
iv
vi
it
té
é
d
de
e
l
l’
’i
in
nt
té
ég
gr
ra
al
le
e
d
d’
’u
un
ne
e
f
fo
on
nc
ct
ti
io
on
n
c
co
on
nt
ti
in
nu
ue
e
Théorème :
Soit
a b
< ∈
ℝ
et
[
]
: ,
f a b
→
ℝ
. Si
f
est continue, positive et
( )d 0
b
a
f t t
=
∫
alors
0
f
=
.
En particulier :
Soit
a b
<
et
[
]
: ,
f a b
→
ℝ
continue.
Si
( ) d 0
b
a
f t t
=
∫
alors
0
f
=
.
Si
2
( )d 0
b
a
f t t
=
∫
alors
0
f
=
.

- 5 / 8 -
Cor :
Soit
a b
< ∈
ℝ
et
[
]
: ,
f a b
→
ℝ
continue.
Si
0
f
≥
et
0
f
≠
alors
( )d 0
b
a
f t t
>
∫
.
Si
0
f
≤
et
0
f
≠
alors
( )d 0
b
a
f t t
<
∫
.
Cor :
Soit
a b
< ∈
ℝ
et
[
]
: ,
f a b
→
ℝ
continue.
Si
( )d 0
b
a
f t t
=
∫
alors
0
f
=
ou bien
f
prend une valeur strictement positive et une valeur strictement
négative. Dans les deux cas :
]
[
, , ( ) 0
c a b f c
∃ ∈ =
.
5
5°
°)
)
F
Fo
on
nc
ct
ti
io
on
n
d
dé
éf
fi
in
ni
ie
e
p
pa
ar
r
u
un
ne
e
i
in
nt
té
ég
gr
ra
al
le
e
Pour dériver une fonction définie par
( )
( )
( ) ( )d
v x
u x
g x f t t
=
∫
avec
f
fonction continue, on introduit
F
primitive de
f
et on a alors
( ) ( ( )) ( ( ))
g x F v x F u x
= −
qui permet d’obtenir
( ) ( ) ( ( )) ( ) ( ( ))
g x v x f v x u x f u x
′ ′ ′
= −
.
I
IV
V.
.
I
In
nt
té
ég
gr
ra
at
ti
io
on
n
p
pa
ar
r
p
pa
ar
rt
ti
ie
es
s
Soit
I
un intervalle non singulier.
1
1°
°)
)
P
Pr
ri
im
mi
it
ti
iv
va
at
ti
io
on
n
p
pa
ar
r
p
pa
ar
rt
ti
ie
es
s
Soit
u
,
v
deux fonctions dérivables sur
I
.
uv
est dérivable sur
I
et
( )
uv u v uv
′ ′ ′
= +
.
Ainsi
( )
u v uv uv uv uv
′ ′ ′ ′
= − = −
∫ ∫ ∫
.
2
2°
°)
)
D
Dé
ét
te
er
rm
mi
in
na
at
ti
io
on
n
d
de
e
( )e d
x
P x x
α
∫
Soit
P
une fonction polynomiale de degré
n
∈
ℕ
et
*
α
∈
ℝ
.
2 méthodes usuelles :
(1) Par ipp successives :
( )
2 1
1 1 1 1 ( 1)
( )e d ( )e ( )e d ( ) ( ) ... ( ) e
n
x x x n x te
n
P x x P x P x x P x P x P x C
α α α α
α α α α α
+
−
′ ′
= − = − + + +
∫ ∫
(2) D’après l’étude ci-dessus :
( )e d ( )e
x x te
P x x Q x C
α α
= +
∫
avec
Q
fonction polynomiale de degré
n
.
On peut alors chercher
Q
par coefficients inconnus de sorte que :
( ( )e ) ( ( ) ( ))e ( )e
x x x
Q x Q x Q x P x
α α α
α
′ ′
= + =
.
3
3°
°)
)
D
Dé
ét
te
er
rm
mi
in
na
at
ti
io
on
n
d
de
e
( )cos( )d
P x x x
α
∫
e
et
t
( )sin( )d
P x x x
α
∫
Soit
P
une fonction polynomiale de degré
n
∈
ℕ
et
α
∗
∈
ℝ
. Détermination de
( )cos( )d
P x x x
α
∫
.
2 méthodes usuelles :
(1) Par ipp successives :
1 1
( )cos( )d ( )sin ( )sin( )d ...
P x x x P x x P x x xα α α
α α
′
= − =
∫ ∫
(2) Par l’étude ci-dessus :
( )cos( )d ( )cos( ) ( )sin( )
te
P x x x A x x B x x C
α α α= + +
∫
avec
,
A B
fonctions
polynomiales de degrés inférieurs à
n
. On peut alors chercher
A
et
B
par coefficients inconnues de sorte que :
(
)
( )cos ( )sin ( )cos
A x x B x x P x x
α α α
′
+ =
Détermination
( )sin( )d
P x x x
α
∫
: idem
 6
7
8
6
7
8
1
/
8
100%