Speed-Sensorless Estimation for Induction Motors with EKFs
Telechargé par
maden.momen

272 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 1, FEBRUARY 2007
Speed-Sensorless Estimation for Induction Motors
Using Extended Kalman Filters
Murat Barut, Student Member, IEEE, Seta Bogosyan, Member, IEEE, and Metin Gokasan, Member, IEEE
Abstract—In this paper, extended-Kalman-filter-based estima-
tion algorithms that could be used in combination with the
speed-sensorless field-oriented control and direct-torque control of
induction motors (IMs) are developed and implemented experi-
mentally. The algorithms are designed aiming minimum estima-
tion error in both transient and steady state over a wide velocity
range, including very low and persistent zero-speed operation. A
major challenge at very low and zero speed is the lost coupling
effect from the rotor to the stator, which makes the information
on rotor variables unobservable on the stator side. As a solution to
this problem, in this paper, the load torque and the rotor angular
velocity are simultaneously estimated, with the velocity taken into
consideration via the equation of motion and not as a constant
parameter, which is commonly the case in most past studies. The
estimation of load torque, on the other hand, is performed as a
constant parameter to account for Coulomb and viscous friction
at steady state to improve the estimation performance at very
low and zero speed. The estimation algorithms developed based
on the rotor and stator fluxes are experimentally tested under
challenging variations and reversals of the velocity and load torque
(step-type and varying linearly with velocity) over a wide velocity
range and at zero speed. In all the scenarios, the current estimation
error has remained within a very narrow error band, also yielding
acceptable velocity estimation errors, which motivate the use of
the developed estimation method in sensorless control of IMs over
a wide velocity range and persistent zero-speed operation.
Index Terms—Extended Kalman filter (EKF), induction motor
(IM), low/zero-speed operation, sensorless control.
I. INTRODUCTION
THERE has been extensive research in the sensorless field-
oriented control (FOC) and direct-torque control (DTC) of
induction motors (IMs) for the last two decades. Both control
methods require the accurate knowledge of the amplitude and
angular position of the rotor or stator flux with reference to
the stationary stator axis (in Cartesian coordinates). Addition-
ally, information on the rotor angular velocity is required for
velocity control over a wide speed range and in the low and
zero-speed range for position-control applications. However,
although speed sensorless drives are now well-established in in-
dustry for medium and high-speed operation [1], their persistent
operation at very low and zero speed still constitutes a persisting
Manuscript received July 20, 2004; revised July 31, 2006. Abstract published
on the Internet September 15, 2006.
M. Barut and S. Bogosyan are with the Electrical and Computer Engineer-
ing Department, University of Alaska Fairbanks, Fairbanks, AK 99775 USA
(e-mail: [email protected]; [email protected]).
M. Gokasan is with the Electrical and Electronics Engineering Department,
Istanbul Technical University, Maslak, Istanbul, Turkey (e-mail: gokasan@itu.
edu.tr).
Digital Object Identifier 10.1109/TIE.2006.885123
challenge [2]. The problems are due to parameter uncertainties,
signal acquisition errors, and noise in the very low speed range,
with an additional difficulty encountered at zero speed in steady
state, when the stator current ceases to convey information on
the rotor angular velocity [3], [4].
Model-based methods using IM state equations and signal-
injection methods [5] using the anisotropic properties of the
machine have been competing for the improvement of the
zero/low-speed performance of sensorless IMs [2]. Speed sen-
sorless control methods based on signal injection are capable
of long-term stability at zero stator frequency; however, they
are highly sophisticated and require customized designs for a
particular motor drive [3].
Recently, for the solution of the problem zero/very low
speed, model-based estimation methods have been proposed,
such as in [6]–[8], specifically addressing persistent operation
zero speed. Among those studies [6] uses a total-least-square-
based speed adaptive flux observer which enables zero-stator-
frequency operation over an interval of 60 s, with mean and
maximum estimation error values of 1.34 and 38 r/min, re-
spectively, at zero load. The study in [7] uses model-reference-
adaptive-system-based linear neural networks, presenting
results with a maximum velocity estimation error of 95 r/min
and a persistent operation interval of 60 s at zero speed. The
study in [8] utilizes a continuous sliding-mode approach, for
which zero-stator-frequency results are obtained under load and
presented only for a very short interval of 4 s.
In addition to the aforementioned group of studies taking a
deterministic approach to the design of closed-loop observers,
there are also extended-Kalman-filter (EKF)-based applications
in the literature, taking a stochastic approach for the solution of
the problem. Model uncertainties and nonlinearities inherent to
IMs are well-suited for the stochastic nature of EKFs [9], [10].
With this method, it is possible to make the online estimation
of states while simultaneously performing identification of
parameters in a relatively short time interval [11]–[13], also
taking system/process errors and measurement noises directly
into account. The EKF is also known for its high convergence
rate, which improves transient performance significantly. Ad-
ditionally, accurate estimation and convergence in steady state
requires high-frequency signals, which are also inherently met
by EKFs with the model and measurement noises included in
the model. These properties are the major advantages of the
EKF over other estimation methods and are the reasons why
the method finds wide application in sensorless estimation in
spite of its computational complexity, which also ceases to be a
problem with the developments in high-performance processor
technology.
0278-0046/$25.00 © 2007 IEEE

BARUT et al.: SPEED-SENSORLESS ESTIMATION FOR INDUCTION MOTORS USING EXTENDED KALMAN FILTERS 273
There have been a large number of EKF applications for the
sensorless control of IMs; studies using full-order [14], [15] and
reduced order [16], [17] estimators have been presented with
experimental results. The study in [18] compares the results of
EKF and Extended Luenberger Observer (ELO) for high-speed
operation using the IM model in the rotating axes, while the
study in [19] performs a comparison of EKF and Sliding Mode
Observer (SMO). A common feature in all these studies is the
estimation of velocity, which is taken into consideration as a
slow varying or constant parameter, except in [18]. Although
good results have been obtained in those studies in the relatively
low and high-speed operation region, the performance at zero
stator frequency or at very low speed is not satisfactory or not
addressed at all.
The major contribution of this paper is the design and exper-
imental implementation of EKF-based estimation algorithms
developed for use with the speed sensorless DTC and direct
FOC of IMs over a wide speed range, including zero speed. For
this purpose, unlike previous EKF-based estimation studies,
by taking the angular velocity into consideration as a constant
parameter, ωis estimated as a state with the utilization of the
equation of motion. The inclusion of the mechanical equation
helps the estimation process by conveying the rotor–stator
relationship when the stator currents cease to carry information
on rotor variables at zero speed. Friction effects are also known
to deteriorate performance at low velocity and position-control
applications. To address this issue in this paper, the estimation
of tLis performed as a constant to account for friction effects,
particularly those of Coulomb and viscous friction at the steady
state. In the proposed EKF algorithms, the stator and rotor flux
amplitudes and positions are also estimated in addition to the
stator currents (referred to the stator stationary frame), which
are also measured as output. For improved estimation accuracy,
the EKF algorithms also take into consideration the control
input error arising due to the limited word length of the Analog
Digital Converter (ADC) [13]. This paper aims to address prob-
lems related to sensorless estimation in IMs over a wide speed
range, and closed-loop control of IMs is outside the scope of
this paper. The evaluation procedure of an estimator without the
use of a closed-loop control could, in a sense, be considered off-
line; to ensure a realistic evaluation of the online performance
of the EKF estimator in spite of the fact, pulsewidth-modulation
(PWM)-type input voltages have been applied to the IM via
the ac drive, and the actual ds1104-based motion-control unit
and motor are used to process the algorithm. The estimation
schemes are thus tested experimentally under instantaneous
load (linear with velocity and step-type) and velocity variations
to evaluate the performance over a wide speed range, as well
as during persistent operation at zero speed. Very low current
and velocity estimation errors have been obtained under the
developed scenarios, motivating the utilization of the developed
estimation approach in the sensorless control of IMs.
The paper is organized as follows: after the introduction in
Section I, the derivation of the extended models is discussed
in Section II for the estimation algorithms; Section III de-
scribes the development of the EKF algorithm for both models;
Section IV gives the hardware configuration, with Section V
presenting and discussing the experimental results for all three
scenarios. Finally, the conclusions and suggestions for future
improvements are given in Section VI.
II. EXTENDED MATHEMATICAL MODEL OF THE IM
As it is well known, IM is described by a fifth-order differ-
ential equation with two inputs and only three state variables
available for measurement [20]. For speed sensorless control,
the model consists of differential equations based on the stator
and/or rotor electrical circuits considering the measurement of
stator current and/or voltages. Being different from previous
EKF-based estimators, which estimate the rotor velocity using
the aforementioned equations, the extended IM model derived
in this paper also includes the equation of motion to be utilized
for the estimation of the rotor velocity. The EKF-based estima-
tors designed for FOC and DTC are based on the extended IM
models in the following general form:
˙xe(t)=fe(xe(t),u
e(t)) + wx1(t)
=Ae(xe(t)) xe(t)+Beue(t)+wx1(t)(1)
Z(t)=he(xe(t)) + wx2(t)(measurement equation)
=Hexe(t)+wx2(t).(2)
Here, the extended state vector xerepresents the estimated
states and load torque tL, which is included in the extended
state vector as a constant state with the assumption of a slow
variation with time. fe: nonlinear function of the states and
inputs. Ae: system matrix. ue: control input vector. Be: input
matrix. wx1: process noise. he: function of the outputs. He:
measurement matrix. wx2: measurement noise. Based on the
general form in (1) and (2), the detailed matrix representation
of the two IM models can be given as below.
Model 1: Extended model of IM based on the stator flux is
shown by (3) and (4) at the bottom of the next page.
Model 2: Extended model of IM based on the rotor flux is
shown by (5) and (6) at the bottom of the next page.
The following are defined for (3)–(6). pp: number of pole
pairs. Lσ=σLs: stator transient inductance. σ: leakage or
coupling factor. Lsand Rs: stator inductance and resistance, re-
spectively. L
rand R
r: rotor inductance and resistance referred
to the stator side, respectively. νsα and νsβ : stator stationary
axis components of stator voltages. isα and isβ : stator station-
ary axis components of stator currents. ψsα and ψsβ : stator
stationary axis components of stator flux. ψrα and ψrβ: rotor
stationary axis components of stator flux. JL: total inertia of
the IM and load. ωm: angular velocity.
III. DEVELOPMENT OF THE EKF ALGORITHM
An EKF algorithm is developed for the estimation of the
states in the extended IM model given in (3) and (4), or (5)
and (6), to be used in the sensorless control of the IM. The
KF method used for this purpose is a well-known recursive
algorithm that takes the stochastic state space model of the
system into account together with the measured outputs to
achieve the optimal estimation of states [19] in multi-input
multi-output systems. The system and measurement noises are
considered to be in the form of white noise. The optimality of

274 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 1, FEBRUARY 2007
the state estimation is achieved with the minimization of the
covariance of the estimation error. For nonlinear problems, the
KF is not strictly applicable since linearity plays an important
role in its derivation and performance as an optimal filter. The
EKF attempts to overcome this difficulty by using a linearized
approximation where the linearization is performed about the
current state estimate [21]. This process requires the discretiza-
tion of (3) and (4), or (5) and (6), as below
xe(k+1)=fe(xe(k),u
e(k)) + wx1(k)(7)
Z(k)=Hexe(k)+wx2(k).(8)
As mentioned before, EKF involves the linearized approxima-
tion of the nonlinear model [(7) and (8)] and uses the current
estimation of states ˆxe(k)and inputs ˆue(k)in linearization
by using
Fe(k)= ∂fe(xe(k),u
e(k))
∂xe(k)ˆxe(k),ˆue(k)
(9)
Fu(k)= ∂fe(xe(k),u
e(k))
∂ue(k)ˆxe(k),ˆue(k)
.(10)
Thus, the EKF algorithm can be given in the following recursive
relations:
N(k)=Fe(k)P(k)Fe(k)T+Fu(k)DuFu(k)T+Q
(11a)
P(k+1)=N(k)−N(k)HT
e
×Dξ+HeN(k)HT
e−1HeN(k)(11b)
ˆxe(k+1)= ˆ
fe(xe(k),ˆue(k)) + P(k+1)HT
eD−1
ξ
×(Z(k)−Heˆxe(k)) .(11c)
Here, Q: covariance matrix of the system noise, namely model
error. Dξ: covariance matrix of the output noise, namely mea-
surement noise. Du: covariance matrix of the control input
noise (νsα and νsβ ), namely, input noise. Pand N:covari-
ance matrix of state estimation error and extrapolation error,
respectively.
The algorithm involves two main stages: prediction and
filtering. In the prediction stage, the next predicted states ˆ
fe(·)
and predicted state error covariance matrices P(·)and N(·)
are processed, while in the filtering stage, next estimated states
ˆxe(k+1)obtained as the sum of the next predicted states and
˙
isα
˙
isβ
˙
ψsα
˙
ψsβ
˙ωm
˙
tL
˙xe
=
−Rs
Lσ+R
rLs
L
rLσ−ppωmR
r
L
rLσ
ppωm
Lσ00
−ppωm−Rs
Lσ+R
rLs
L
rLσ−ppωm
Lσ
R
r
L
rLσ00
−Rs00000
0−Rs0000
−3
2
pp
JLψsβ 3
2
pp
JLψsα 000−1
JL
000000
Ae
isα
isβ
ψsα
ψsβ
ωm
tL
xe
+
1
Lσ0
01
Lσ
10
01
00
00
Be
νsα
νsβ
ue
+w11(t)(3)
isα
isβ
Z
=100000
010000
He
isα
isβ
ψsα
ψsβ
ωm
tL
+w12 (4)
˙
isα
˙
isβ
˙
ψrα
˙
ψrβ
˙ωm
˙
tL
˙xe
=
−Rs
Lσ+R
rL2
m
L2
rLσ0R
rLm
L2
rLσ
Lm
LσL
rppωm00
0−Rs
Lσ+R
rL2
m
L2
rLσ−Lm
LσL
rppωmR
rLm
L2
rLσ00
R
r
L
rLm0−R
r
L
r−ppωm00
0R
r
L
rLmppωm−R
r
L
r00
−3
2
pp
JL
Lm
L
rψrβ 3
2
pp
JL
Lm
L
rψrα 000−1
JL
000000
Ae
isα
isβ
ψrα
ψrβ
ωm
tL
xe
+
1
Lσ0
01
Lσ
00
00
00
00
Be
νsα
νsβ
ue
+w21(t)
(5)
isα
isβ
Z
=100000
010000
He
isα
isβ
ψrα
ψrβ
ωm
tL
+w22 (6)

BARUT et al.: SPEED-SENSORLESS ESTIMATION FOR INDUCTION MOTORS USING EXTENDED KALMAN FILTERS 275
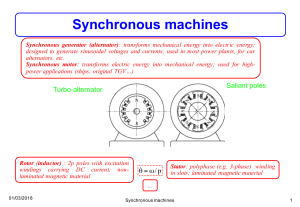
Fig. 1. Structure of the EKF algorithm.
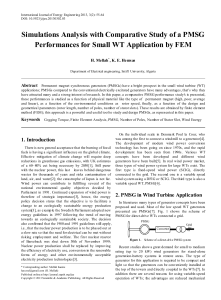
Fig. 2. Schematic representation of the experimental setup.
the correction term [second term in (11c)] are calculated. The
schematic representation of the algorithm is given in Fig. 1.
The algorithm utilizes the extended or augmented model in
(3) and (4), or (5) and (6), to generate all states required for
the sensorless control system, in addition to the load torque tL,
using the measured phase currents and voltages.
IV. HARDWARE CONFIGURATION
The experimental test-bed for the EKF-based estimators is
given in Fig. 2. The IM in consideration is a three-phase four-
pole 4-kW motor; the detailed specifications of which will be
given in the experimental results section. The EKF algorithm
and all analog signals are developed and processed on a Power
PC-based DS1104 Controller Board, offering a four-channel
16-bit (multiplexed) ADC and four 12-bit ADC units. The
controller board processes floating-point operations at a rate
of 250 MHz. A torque transducer rated at 50 N ·m and an
encoder with 1024 counts/r are also used for the evaluation and
verification of the load torque and velocity estimates. The phase
voltages and currents are measured with high band voltage and
current sensors.
In the experiments, the IM is fed via an ac drive with a con-
stant V/f PWM voltage instead of a sinusoidal input voltage to
achieve a more realistic performance test. Although the ac drive
is used in open loop, voltages with different frequency values
can be varied linearly with the acceleration and deceleration
times of the driver, which also allows velocity reversal. The load
is generated through a dc machine operating in generator mode
coupled to the IM. An array resistor connected to the armature
TAB LE I
RATED VALUES AND PARAMETERS OF THE IM USED IN THIS PAPER
terminals of the dc machine is used to vary the load torque
applied to the IM, based on tL=k2
tω/R, where ktis the torque
constant of dc machine, ωis the angular velocity, and Ris the
total resistance (switched array +armature). The value of the
resistance is adjusted to 14.3 Ωto generate a load torque tLof
18 N ·m at approximately 1400–1420 r/min, while for a tLof
10.4 N ·m, the resistance is set to 29.4 Ωand to its maximum
value, respectively. Finally, the total inertia of the system does
not change in this application and is assumed to be constant.
It consists of the motor and generator inertia, which are both
determined accurately and reflected to the EKF algorithms, as
given in Tables I and II.
V. E XPERIMENTAL RESULTS
The parameters for the IM and dc generator are listed in
Tables I and II. The values of system parameters and covari-
ance matrix elements are very effective on the performance
of the EKF estimation. In this paper, to avoid computational
complexity, the covariance matrix of the system noise Qis
chosen in diagonal form, also satisfying the condition of pos-
itive definiteness. According to the KF theory, the Q,theDξ
(measurement error covariance matrix), and the Du(input error
covariance matrix) have to be obtained by considering the
stochastic properties of the corresponding noises [22], [23].
However, since these are usually not known, in most cases,
the covariance matrix elements are used as weighting factor or
tuning parameters. In general, while the tuning of the initial
values of the P(estimation error covariance matrix) and the
Qis done by experimental trial-and-error to achieve a rapid
initial convergence and the desired transient and steady-state
behaviors of the estimated states and parameters, the Dξand
Duare determined taking into account the measurement errors
of the current and voltage sensors and the quantization errors of
the ADCs, as given below.
For Model 1
Q= diag 1.4×10−12 A21.4×10−12 A2
×1.3×10−12 (V·s)21.3×10−12 (V·s)2
×9.6×10−14 (rad/s)21.7×10−12 (N·m)2
P= diag10 A210 A210 (V·s)210 (V·s)2
×10 (rad/s)210 (N·m)2.

276 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 1, FEBRUARY 2007
TAB LE II
RATED VALUES AND PARAMETERS OF THE DC MACHINE USED IN THIS PAPER
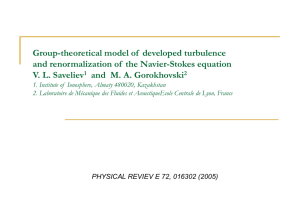
Fig. 3. Stator currents and voltages applied to the IM through the ac drive.
For Model 2
Q= diag1.5×10−11 A21.5×10−11 A210−15 (V·s)2
×10−15 (V·s)210−15 (rad/s)210−15 (N·m)2
P= diag1A21A21(V·s)21(V·s)21(rad/s)21(N·m)2
.
For both models
Dξ= diag 1.5×10−7A21.5×10−7A2
Du= diag 10−10 V210−10 V2.
Fig. 3 demonstrates the transformed currents and voltages at
50 Hz and 380 V for a tLof approximately 20 N ·m. The
performance of the IM is tested in open loop with PWM input
voltages/currents given in Fig. 3. The EKF algorithm takes
as the input of the transformed components of the current
and voltage. The following is a generalized description of this
transformation
xα=xa;xβ=1
√3(xb−xc)(12)
where x:iand νfor current and voltage, respectively.
Due to the importance of system parameter values, prior to
the performance tests, the dc resistance is measured, and no
load and short circuit experiments are performed to calculate
the initial values of the parameters. These parameters are tuned
to obtain minimum error of the current, velocity, and output
torque between the actual system and its model. By applying
the same voltage inputs to the actual system, its model is
running simultaneously on the computer. The tuning process is
performed over a wide velocity range and for a variety of load
torque values. The application considered in this paper does not
involve a change in the inertia; therefore, its rated value is used
in the models.
To evaluate the performance of the developed EKF schemes
for the stator and rotor oriented IM models—namely, Model 1
and Model 2, respectively—three scenarios are implemented
experimentally, with different variations given to the load
torque and velocity references. Besides the output current, the
velocity and induced torque are also measured in all three
cases to provide a basis of evaluation for the performance of
EKF schemes. The results are presented in Figs. 4–6. In these
figures, tind&ˆ
tL,nm&ˆnm,ˆ
ψsα,ˆ
ψsβ ,ˆ
ψrα, and ˆ
ψrβ illustrate
the induced torque as obtained from the torque transducer and
estimated load torque, the actual and estimated velocity, and
the estimated αand βcomponents of the stator and rotor
fluxes, respectively. e(·)error signals demonstrate the deviations
between the actual and the estimated components of the stator
current. The sampling rate used for the EKF estimation in the
experiments is Tsample = 100 µs. The estimation of states is
started with the assumption of no aprioriinformation and with
initial values of zero.
A. Scenario I—Step-Type Changes in tL(Fig. 4)
In this scenario, the EKF schemes for both models are tested
under step-type variations of the load torque, as can be seen in
Fig. 4. These step variations are created by switching the load
resistors ON and OFF. Inspecting the results for both models,
it can be noted that, in spite of the instantaneous switching
effects, isα and isβ peaks and variations remain within a very
low error band. The small value of this estimation error is an
important indicator for the good performance of the EKF in the
high-velocity range under load and no load. The estimated
 6
7
8
9
6
7
8
9
1
/
9
100%