Synchronous machines 1
Synchronous machines
Turbo-alternator Saliant poles
p/ω=θ
!
Rotor (inductor) : 2p poles with excitation
windings carrying DC current; non-
laminated magnetic material
Stator: polyphase (e.g. 3-phase) winding
in slots; laminated magnetic material
Synchronous generator (alternator): transforms mechanical energy into electric energy;
designed to generate sinusoidal voltages and currents; used in most power plants, for car
alternators, etc.
Synchronous motor: transforms electric energy into mechanical energy; used for high-
power applications (ships, original TGV…)
...
01/03/2018

2
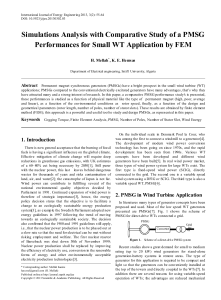
No-load characteristic
Evolution of the voltage Evin a stator phase
vs. intensity of the excitation current Ie, for a
given rotation speed and with no generated
stator current
⎩
⎨
⎧
=
=θ
=0I
constantevitesse
avec)I(fE ev
!
)I(kE evEv Φθ=!
Magnetic flux produced
by the inductor and seen by the
stator winding
Non linearity with hysteresis
due due remanent magnetization
•The rotor winding, carrying the DC current Ieand ro ta t in g
at speed ω/p,produces in the airgap asl i ding m.m.f. Fe
(as seen from the stator).
• Fegenerates amagnetic flux density Br(with the sa me
phase) in the airgap, which induces si nu soi da l e.m.f.s Ev
in the stator windings,with aphase lag of
π
/2.
Synchronous machines
average characteristic
average characteristic
with constant speed

3
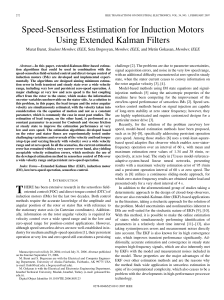
Vector diagram with load
Diagram of magnetomotive forces and magnetic flux densities
resulting m.m.f.
(3) = (1)+(2)
m.m.f. from Ie
(1)
m.m.f. from I
(2)
(1) The rotor winding, carrying the DC current Ieand
rotating at speed ω/p, produces in the airgap a sliding
m.m.f. Fe(as seen from the stator)..
(2) The polyphase current Iin the stator winding produces a
sliding m.m.mf. FI(in phase with I).
(3) The resulting m.m.f. is Fr= Fe+FI.
(4) Frgenerates a magnetic flux density Br(with the same
phase) in the airgap,, which induces sinusoidal e.m.f.s in
the stator windings, with a phase lag of
π
/2.
(4b)
r
B
(4a)
ee IF γ=
IF
Iδ=
and
Synchronous machines

4
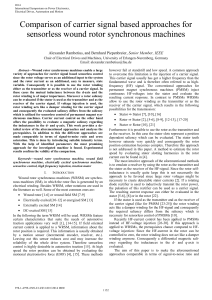
Vector diagram with load
Stator leakage flux
1tm
3tm2tm1t
i)(
iii)t(e
∂λ−λ−=
∂λ−∂λ−∂λ−=
λ
IXjE f
−=
λ
)(X mf λ−λω=
Slot leakage
flux
End-winding
leakage flux
IXjEE frt −=
IRIXjEU fr −−=
0iii 321 =++
(seen by the stator but not
coming from the rotor) e.m.f. induced by leakage flux
because
with
Stator leakage reactance
total e.m.f.
Resistance of
stator winding
ee IF γ=
IF
Iδ=
and
IIF er δ+γ=
II
F
Ie
r
def
rγ
δ
+=
γ
=
Equivalent
excitation current
Diagrams
Er≡no-load e.m.f. produced by Ir
Synchronous machines

5
‘Which excitation current Ieshould one impose in the synchronous
machine to reach the functioning point corresponding to a given
voltage Uand current Iin the stator,with a phase shift of ϕ
between Uand I?’
Potier diagram
IXjIRUE fr ++=
(1)
(0)
(2)
(3)
(4)
(5)
(2)
(3)
III re γ
δ
−=
Er≡no-load e.m.f produced by the
equivalent current Ir
Synchronous machines
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%