Mécanique 2- TD-1- Sujet - Géométrie des masses (matrice d'inertie)
ISSAT de Sousse LGM-01
06//03/2020
Page 1 sur 5
-------------------
TD- Géométrie des masses -ISSATSO -LGM-01 (Mars 2020)
L’usinage est une opération de transformation d’un produit par
enlèvement de matière. Cette opération est à la base de la
fabrication de produits dans les industries mécaniques. On appelle
le moyen de production associé à une opération d’usinage une
machine-outil ou un centre d’usinage. La génération d’une surface
par enlèvement de matière est obtenue grâce à différents outils
munis d’au moins une arête coupante.
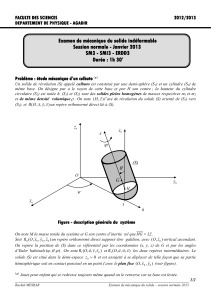
Axe Z
Broche + Outil
Axe Y
Pièce Axe B Bâti
Axe C
Axe X
Un chargeur d’outils est un système permettant
de charger automatiquement l’outil utile stocké
dans un magasin sur la broche pour une phase
d’usinage donnée. Les différentes formes de
pièces sont ensuite obtenues par des
translations et des rotations de l'outil par
rapport à la pièce à usiner.
Exemple de pièce complexe obtenue par usinage
On s’intéresse donc au chargeur d’outils équipant la machine outils dont on donne une description
structurelle ainsi qu’une modèle cinématique. Pour déterminer le couple moteur et résoudre les
problèmes d’équilibrage, il est nécessaire de déterminer la matrice d’inertie de l’ensemble tournant 2.
y

Mécanique 2- TD-1- Sujet - Géométrie des masses (matrice d'inertie)
ISSAT de Sousse LGM-01
06//03/2020
Page 2 sur 5
-------------------
1 Déterminer la matrice d’inertie en O1 de l’ensemble 2 lorsque le bras est équipé de deux
outils montés symétriquement.
1.1 Déterminer les éléments de symétrie de l’ensemble 2.
1.2 Montrer que la matrice d’inertie de l’ensemble 2au point O1 dans la base
1 1 1
( , , )x y z
( )
11 1 1
O( , , )
I2x y z
est diagonale.
1.3 Déterminer la matrice d’inertie de l’ensemble E au point O1 (par le théorème de
Huygens).
1.4 Déduire la matrice d’inertie en O1 de l’ensemble 2 au point O1 dans la base
1 1 1
( , , )x y z
.
2 Déterminer la matrice d’inertie en O1 de l’ensemble 2 lorsque le bras n’est équipé que d’un
seul outil.
2.1 Déterminer les éléments de symétrie de l’ensemble 2
2.2 Déduire la forme générale de la matrice d’inertie de l’ensemble 2 au point O1 dans la base
1 1 1
( , , )x y z
2.3 Déduire la matrice d’inertie en O1 de l’ensemble 2 au point O1 dans la base
1 1 1
( , , )x y z
Remarque :
La matrice d’inertie de la plaque de centre de gravité O1 est :
( )
1
1 1 1
22
22
O
22
( , , )
( ) 0 0
12
I 0 ( ) 0
12
0 0 ( )
12
S
S
S
x y z
mbc
m
S b e
mec
+
=+
+
Réponses
1 Reposes au 1
1.1 Réponse 1.1
L’ensemble 2 = bras pivotant + deux ensembles E montés symétriquement. Ce Solide 2 possède alors deux plans
de symétrie perpendiculaires :
1 1 1
(o ,x ,y )
et
1 1 1
(o ,x ,z )
1.2 Forme diagonale de
( )
1
O
I2
La forme générale de la matrice d’inertie est :
( )
1 1 1
1 1 1 1
1 1 1 1 1 1
2, 2, 2,
O 2, 2, 2,
2, 2, 2, ( , , )
I 2
C
O O O
O O O
O O O x y z
A F E
F B D
ED
−−
= − −
−−
Les deux plans de symétrie montrent que :
▪
1 1 1
(o ,x ,y )
plan de symétrie. Soit
1 1 1
P(x ,y ,z )
, le point symétrique correspondant est
'1 1 1
P (x ,y , z )−
. On
peut avoir alors
1
2, 1 1
0
O
D y z dm==
et
1
2, 1 1
0
O
E x z dm==
▪
1 1 1
(o ,x ,z )
plan de symétrie. Soit
1 1 1
P(x ,y ,z )
, le point symétrique correspondant est
'1 1 1
P (x , y ,z )−
.

Mécanique 2- TD-1- Sujet - Géométrie des masses (matrice d'inertie)
ISSAT de Sousse LGM-01
06//03/2020
Page 3 sur 5
-------------------
alors
1
2, 1 1
0
O
D y z dm==
et
1
2, 1 1
y 0
O
F x dm==
Suite à l’existence de deux plans de symétrie, la forme de
( )
1
O
I2
sera diagonale alors :
( )
1
11
11 1 1
2,
O 2,
2, ( , , )
00
I 2 0 0
0 0 C
O
O
Ox y z
A
B
=
1.3 Les composantes diagonales de la matrice d’inertie de l’outil E au point O1
Rappels du cours
Le passage d’une matrice d’inertie définie en G, centre d’inertie de S, à la matrice d’inertie en A (figure 1) s’écrit
:
( , , )
G
G
Gx y z
x
OG y
z
;
( )
, , ,
, , ,
( , , )
, , , ( , , )
I S
C
S O S O S O
O S O S O S O
x y z
S O S O S O x y z
A F E
F B D
ED
−−
= − −
−−
( ) ( )
1 1 1 1 1 1
22
22
( , , ) ( , , ) 22
( , , )
()
I S I S ( )
( )
S G G S G G S G G
O G S G G S G G S G G
x y z x y z
S G G S G G S G G x y z
m y z m x y m x z
m x y m x z m y z
m x z m y z m x y
+ − −
= + − + −
− − +
1 1 1 1 1 1
22
, , , , , , 22
, , , , , ,
, , , , , ,
( , , ) ( , , )
()
( )
C C
S O S O S O S G S G S G S G G S G G S G G
S O S O S O S G S G S G S G G S G G S G G
S O S O S O S G S G S G S G G
x y z x y z
A F E A F E m y z m x y m x z
F B D F B D m x y m x z m y z
E D E D m x z m
− − − − + − −
− − = − − + − + −
− − − − − −
22
( , , )
( )
S G G S G G x y z
y z m x y
+

Mécanique 2- TD-1- Sujet - Géométrie des masses (matrice d'inertie)
ISSAT de Sousse LGM-01
06//03/2020
Page 4 sur 5
-------------------
1
11
1
G
G
G
x
OG y
z
;
( )
1 1 1
1 1 1 1
1 1 1
1 1 1 1 1 1
, , ,
, , ,
( , , )
, , , ( , , )
I E
C
E O E O E O
O E O E O E O
x y z
E O E O E O x y z
A F E
F B D
ED
−−
= − −
−−
( ) ( )
11 1 1
1 1 1
22
22
( , , )
( , , ) 22
( , , )
()
I S I S ( )
( )
S G G S G G S G G
O G S G G S G G S G G
x y z
x y z
S G G S G G S G G x y z
m y z m x y m x z
m x y m x z m y z
m x z m y z m x y
+ − −
= + − + −
− − +
1
22
, , 1 1
()
E O E G E G G
A A m y z= + +
;
1
22
, , 1 1
()
E O E G E G G
B B m x z= + +
,
1
22
, , 1 1
()
E O E G E G G
C C m x y= + +
et
1
,E O E G G
F m x y=
,
1
,E O E G G
E m x z=
et
1
,E O E G G
D m y z=
1.4 Forme finale de la matrice d’inertie en O1 de l’ensemble 2
La matrice
( )
1
O
I2
est une sommation de deux matrices des solides élémentaires (S et les deux outils E) mais
en tenant compte uniquement des composantes de la matrice
( )
1
O
IE
. On a alors :
( )
1 1 1
1 1 1 1
1 1 1 1 1 1
2, 2, 2,
O 2, 2, 2,
2, 2, 2, ( , , )
00
I 2 0 0
0 0 C
O O O
O O O
O O O x y z
A F E
F B D
ED
− = − =
= − = − =
− = − =
( )
1 1 1 1
1 1 1 1 1
1 1 1 1 1 1 1 1
2, , , 2, 2,
O 2, 2, , , 2,
2, 2, 2, , , ( , , )
2 0 0
I 2 0 2 0
0 0 C 2
O E O S O O O
O O E O S O O
O O O E O S O x y z
A A A F E
F B B B D
E D C C
= + − = − =
= − = = + − =
− = − = = +
( ) ( )
11
22
, 1 1 22
O O , 1 1
( , , ) 22
, 1 1 ( , , )
2 2 ( ) 0 0
I 2 I 0 2 2 ( ) 0
0 0 2 2 ( )
G x E G G
G y E G G
x y z
G z E G G x y z
I m y z
S I m x z
I m x y
++
= + + +
++
Tel que la matrice
( )
11 1 1
O( , , )
Ix y z
S
est définie par :
( )
1
1 1 1
22
22
O
22
( , , )
( ) 0 0
12
I 0 ( ) 0
12
0 0 ( )
12
S
S
S
x y z
mbc
m
S b e
mec
+
=+
+
2 Reposes au 1
2.1 Réponse 2.1
L’ensemble 2 = bras pivotant + un seul ensemble E montés symétriquement. Cet ensemble 2 possède un seul
plan de symétrie
1 1 1
(O ,x ,y )
2.2 Forme diagonale de
( )
1
O
I2
La forme générale de la matrice d’inertie est :

Mécanique 2- TD-1- Sujet - Géométrie des masses (matrice d'inertie)
ISSAT de Sousse LGM-01
06//03/2020
Page 5 sur 5
-------------------
( )
1 1 1
1 1 1 1
1 1 1 1 1 1
2, 2, 2,
O 2, 2, 2,
2, 2, 2, ( , , )
I 2
C
O O O
O O O
O O O x y z
A F E
F B D
ED
−−
= − −
−−
Le plan de symétrie
1 1 1
(O ,x ,y )
implique si
1 1 1
P(x ,y ,z )
, le point symétrique correspondant est
'1 1 1
P (x ,y , z )−
. On peut avoir alors
1
2, 1 1
0
O
D y z dm==
et
1
2, 1 1
0
O
E x z dm==
La forme de la matrice d’inertie
( )
11 1 1
O( , , )
I2x y z
n’est plus diagonale :
( )
11
1 1 1
11 1 1
2, 2,
O 2, 2,
2, ( , , )
0
I 2 0
0 0 C
OO
OO
Ox y z
AF
FB
−
=−
2.3 Forme finale de la matrice d’inertie en O1 de l’ensemble 2
La matrice
( )
1
O
I2
est une sommation de deux matrices des solides élémentaires (S et l’ensemble E) mais en
tenant compte uniquement des composantes
1
,EO
A
;
1
,EO
B
,
1
,EO
C
et
1
,EO
F
, de la matrice
( )
1
O
IE
. On a alors :
( )
1 1 1
1 1 1 1
1 1 1 1 1 1
2, 2, 2,
O 2, 2, 2,
2, 2, 2, ( , , )
0
I 2 0
0 0 C
O O O
O O O
O O O x y z
A F E
F B D
ED
− − =
= − − =
− = − =
( )
1 1 1 1
1 1 1 1 1
1 1 1 1 1 1 1 1
2, , , 2, 2,
O 2, 2, , , 2,
2, 2, 2, , , ( , , )
00
I 2 0 0
0 0 C
O E O S O O O
O O E O S O O
O O O E O S O x y z
A A A F E
F B B B D
E D C C
= + − = − =
= − = = + − =
− = − = = +
( ) ( )
11
22
, 1 1 22
O O , 1 1
( , , ) 22
, 1 1 ( , , )
( ) 0
I 2 I ( ) 0
0 0 ( )
G x E G G E G G
E G G G y E G G
x y z
G z E G G x y z
I m y z m x y
S m x y I m x z
I m x y
+ + −
= + − + +
++
Tel que la matrice
( )
11 1 1
O( , , )
Ix y z
S
est définie par :
( )
1
1 1 1
22
22
O
22
( , , )
( ) 0 0
12
I 0 ( ) 0
12
0 0 ( )
12
S
S
S
x y z
mbc
m
S b e
mec
+
=+
+
1
/
5
100%