Metaheuristic Algorithms for PV Parameter Identification: Review & Fault Detection
Telechargé par
slimaninabila.58

Contents lists available at ScienceDirect
Renewable and Sustainable Energy Reviews
journal homepage: www.elsevier.com/locate/rser
Metaheuristic algorithms for PV parameter identification: A comprehensive
review with an application to threshold setting for fault detection in PV
systems
Dhanup S. Pillai, N. Rajasekar
⁎
Solar Energy Research Cell (SERC), School of Electrical Engineering (SELECT), VIT University, Vellore, India
ARTICLE INFO
Keywords:
Parameter extraction
Fault detection
PV
Metaheuristic algorithms
Optimization techniques
ABSTRACT
Precise model parameters being the prerequisite for realizing accurate PV models, parameter identification
techniques have gained immense interest over the years among the researchers specializing in PV systems. The
application of various promising metaheuristic algorithms to optimize the model parameters have lightened up
the scope of further enhancements in this field. Ever since, numerous metaheuristic algorithms have deployed for
this purpose. With handful of techniques available in this regard, this paper takes up an initiative to review the
existing metaheuristic algorithms based parameter extraction techniques with an emphasis on their compat-
ibility, accuracy, convergence speed, range of parameters set and their validating environment. Based on the
analysis conducted, accurate models available for 17 different industrial solar cells/modules are identified.
Inspired by this review, an unidentified gateway between parameter extraction and fault detection in PV systems
have been identified; and has further extended this review to differentiate some models that can help the re-
searchers to achieve accurate, efficient and rapid fault detection. This review is a valuable gathering of statistics
from the various researches carried out in PV parameter extraction which can assist enhanced researches for
fault detection in PV systems as well.
1. Introduction
Over the decades, efforts have been made to efficiently harness the
abundant renewable energy resources like Sun, Wind, Tides, and
Geothermal Heat to meet the extended energy needs of the mankind.
The contained humungous energy capability and copious availability
irrespective of global locations makes solar energy the foremost among
all resources. However, this unmatched energy resource in real time,
encounters difficulties in the form of PV non-linearity, low PV panel
efficiency and unavailability of standard models for PV performance
assessment. Moreover, constraints in real time data acquisition add to
its complexity. Besides, recent power quality issues due to the pene-
tration of large roof top PV power plants in low voltage distribution
systems necessitates critical simulation tool. Further, the prediction of
PV panel performance is vital in design, optimization, and simulation
analysis of PV systems. Therefore, the need for simulation modeling of
real PV power plants remains indispensable in both academic and in-
dustrial point of view. Unfortunately, till date, no exact model for PV
characteristic prediction has been made available. Moreover, the ex-
isting single and double diode model prediction is vulnerable to the
model parameter variations; especially under the context of low irra-
diance. Further, poor model prediction sometimes lead to erroneous
http://dx.doi.org/10.1016/j.rser.2017.10.107
Received 23 January 2017; Received in revised form 19 August 2017; Accepted 28 October 2017
⁎
Correspondence to: School of Electrical Engineering, VIT University, Vellore, Tamil Nadu 632014, India.
E-mail addresses: [email protected] (D.S. Pillai), [email protected] (N. Rajasekar).
Abbreviations: ABCO, Artificial Bee Colony Optimization; AE, Absolute Error; AGA, Adaptive Genetic Algorithm; APSO, Particle Swarm Optimization with Adaptive Inertia Weight
Control; BBO-M, Bio-Geography Based Optimization with Mutation Strategies; BMO, Bird Mating Optimization; CPSO, Chaos Particle Swarm Optimization; DD, Double Diode; DEIM,
Differential Evolution with Integral Mutation; GGHS, Grouping Based Global Harmony Search; HS, Harmony Search; IADE, Improved Adaptive Differential Evolution; IBCPSO, PSO with
Inverse Barrier Constraints; IP, Interior Point; JADE, Adaptive Differential Evolution; LS, Least Square; MPP, Maximum Power Point; N.A, Not Applicable; NMS, Nelder-Mead Algorithm;
NR, Newton-Raphson; P-DE, Penalty Based Differential Evolution; PSA, Parallel Swarm algorithm; PV, Photovoltaic; RMSE, Root Mean Squared Error; SBMO, Simplified Bird Mating
Optimization; SIV, Suitability Index Variable; STLBO, Simplified Teaching Learning Based Optimization; TVIWAC-PSO, Particle Swarm Optimization with Time Varying Inertia Weight
and Acceleration Coefficients; ABSO, Artificial Bee Swarm Optimization; AIS, Artificial Immune System; ANN, Artificial Neural Network; BBO, Bio-Geography Based Optimization; BFA,
Bacterial Foraging Algorithm; BPFPA, Bee Pollinated Flower Pollination Algorithm; CPU, Central Processing Unit; DE, Differential Evolution; GA, Genetic Algorithm; GPU, Graphical
Processing unit; HSI, Habitat Suitability Index; IAE, Individual Absolute Error; IGHS, Innovative Global Harmony Search; IPSO, Improved Particle Swarm Optimization; LM, Levenberg-
Marquardt; MPCOA, Mutative-Scale Parallel Chaos Optimization; MSE, Mean Squared Error; N.E, Not Extracting; NOCT, Nominal Operating Cell Temperature; N.S, Not Specified; PS,
Pattern Search; PSO, Particle Swarm Optimization; R-JADE, Repaired Adaptive Differential Evolution; SA, Simulated Annealing; SD, Single Diode; STC, Standard Test Conditions; TLBO,
Teaching Learning Based Optimization; VC-PSO, Particle Swarm Optimization with Velocity Clamping
Renewable and Sustainable Energy Reviews xxx (xxxx) xxx–xxx
1364-0321/ © 2017 Elsevier Ltd. All rights reserved.
Please cite this article as: Pillai, D.S., Renewable and Sustainable Energy Reviews (2017), http://dx.doi.org/10.1016/j.rser.2017.10.107

triggering of protection circuits under normal operating conditions as
well. Hence, the subject of PV parameter estimation assumes surmount
importance even in the context of PV fault detection due to the fact that
most of the fault prediction is based on the estimated I-V curves.
Overall, the requirement of accurate PV model is always on high de-
mand.
Researches on PV panel model prediction remains as an agile field
due to: 1) Non-linear PV characteristics and 2) its colossal dependency
on insolation level and panel temperature. Among many models that
exist, the noteworthy PV models to be mentioned are 1) Single Diode
(SD) model and 2) Double Diode (DD) model [1–3]. Apart from these,
the other models detailed in literature are three diode model [4], single
diode model with parasitic capacitor [5], improved two diode model
[6,7], reverse two diode model, generalized three diode model [8],
diffusion based model [9] and multi diode model [10]. However, model
accuracy varies based on the estimated model parameters. Un-
fortunately, it is hardly possible to set global values for these
parameters since the data varies and are not available in the datasheet
provided by the manufacturers either. Making the scenario even worse,
these parameters are to be processed from the minimal data provided in
the datasheet. Therefore, to build an accurate and reliable PV model,
precise model parameters are mandatory. The scope for an authentic
parameter extraction technique further widens and transforms into an
optimization problem since most of the parameter extraction techni-
ques are carried out using optimization techniques. Many optimization
techniques have been deployed to handle the multimodal parameter
optimization problem. Inspired by the significance of PV cell modeling
techniques, even reviews were made available based on the analysis of
different optimization techniques [11–14].In[11], a survey has been
conducted on the various analytical methods and different soft com-
puting techniques available for PV parameter extraction. A review on
various analytical methods in terms of number of parameters extracted
and the effect of each parameter on model characteristics is discussed in
[12]. Comparative analysis of specific six different bio inspired
Nomenclature
Greek symbols
α
Cross over rate
λ
SImmigration rate
σ
0Standard deviation of initial generation
γ
Scaling factor for FPA
ε
2
Switching operator in DEIM
Lλ(
)
Levy factor
β
Mutation rate
σ
G
Standard deviation of current generation
μ
SEmigration rate
ε
Switching factor
μ
m
Mutation probability
English symbols
a
Diode ideality factor
B
W
Bandwidth of generation
C2Social coefficient
C
r
Cross over rate
E
Energy state
f
max
Maximum fitness value
G
Irradiance (W/m
2
)
H
M
Harmony memory
I
0Reverse saturation current (A)
IPh Photon current (A)
IPV
n
Photon current (A)
j
Random index
k
Iteration index
k
max
Maximum number of iterations
M
Number of mutant vectors
M
d
Classic Mutation
mu Mutation variable
N
S
Number of cells in series
p
arent 1,
2
Current solutions in GA
P
m
Mutation rate
P
M
P
Power at maximum power point (W)
r
Random number between 0 and 1
R
i
Rank of the Vector
R
S
Series resistance (Ω)
R
SO Reciprocal of the slope at open circuit point (Ω)
T
Temperature (K)
T
C
Temperature control parameter
T
old
Old teacher
V
Velocity of particle
V
M
P
Voltage at maximum power point (V)
V
P
V
Output PV voltage (V)
W
Inertia weight
WL
.Worst learner
W
min Final inertia weight
X
B
Best vector
X
W
Worst vector
BP Base point
C
1
Cognitive coefficient
CG
Current generation
D
Search space
F
Scaling factor
f
min
Minimum fitness value
G
b
Global best solution
IdDiode current (A)
IMP
Current at maximum power point (A)
I
PV
Output PV current (A)
I
SC
Short circuit current (A)
K
Boltzmann constant (J/K)
K
i
Temperature coefficient of short circuit current (A/K)
K
V
Temperature coefficient at open circuit voltage (V/K)
mcf Mutation control factor
M
e
Electromagnetism based mutation
N
PPopulation size
P
A
R
Pitch adjusting rate
P
b
Current best solution
P
Mi Probability of selection
q
Charge of one electron (C)
ri
Random number between 0 and 1
r
m
Random number between 0 and 1
RP
Shunt resistance (Ω)
R
PO Reciprocal of the slope at short circuit point (Ω)
T
best Best teacher
T
F
Teaching factor
T
new New teacher
V
d
Diode voltage (V)
V
O
C
Open circuit voltage (V)
V
T
Thermal voltage (V)
W
e
End weight in TVIWAC-PSO
W
max
Initial inertia weight
W
sStart weight in TVIWAC-PSO
X
e
Elite vector
Z
Chaotic variable
D.S. Pillai, N. Rajasekar Renewable and Sustainable Energy Reviews xxx (xxxx) xxx–xxx
2

metaheuristic techniques and its scopes for improvement are elaborated
in [13]. While in [14], the author has outlined a detailed review on the
accuracy of the metaheuristic algorithms and its hybrid variants used
for parameter identification. However, none of these researches have
produced an assessment of metaheuristic algorithms based on their
error evaluation and its application towards PV fault diagnostics.
Moreover, a critical performance evaluation over a wide range of me-
taheuristic algorithms used for parameter extraction problem has not
been studied either. On the other hand, for rapid detection and miti-
gation of faults, various fault detection techniques often compare the
real time entities with the threshold ones. Undoubtedly, accuracy of the
threshold limits set by the PV model decides the reliability of a fault
detection technique. Hence, there exists a colossal dependency of PV
parameter extraction for PV fault diagnosis. With handful of literature
available, the paper aims to provide an authentic document that re-
views the various parameter extraction techniques. Further, this review
is extended to differentiate some PV models that can guide researchers/
PV manufacturers to achieve accurate, efficient and rapid fault detec-
tion. All available previous literatures lack this effort. The subsections
provide details regarding: 1) PV modeling, 2) different PV parameter
extraction techniques and its applicability towards parameter identifi-
cation, 3) fault detection in PV systems and its application towards
parameter identification.
2. PV modeling
The two basic PV modeling techniques convenient to represent a PV
module are SD modeling and DD modeling. Sometimes, the ideal PV
models presented in [15,16] are also used for the theoretical under-
standing of PV concepts. Most methods in literature prefer the SD model
due to its simplicity and lesser number of parameters. However, the
lack of accuracy of SD model makes the DD model preferable for certain
applications where precise I-V and P-V characteristics are required. At
the same time, the DD model has the disadvantage of high computa-
tional burden due to more number of model parameters. The steps in-
volved in realizing a PV model for a PV cell is depicted in Fig. 1.
2.1. Single diode PV model
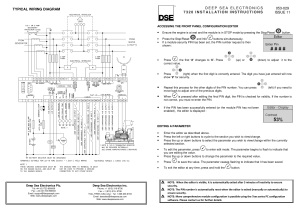
The SD model of a solar PV cell is shown in Fig. 2. It comprises of an
illuminated current source, ‘IPV
n
’or ‘
I
P
h
’, diode, ‘D’that represents the
optical and recombination losses at the surface of the semiconductor,
series resistance, ‘
R
S
’and shunt resistance, ‘
RP
’that account for the
leakage losses.
From figure, by node analysis,
=−−+
II I
VIRs
Rp
pv PV n d
PV pv
(1)
From literature [1–3], the diode current can be expressed as,
=−II VaV{[exp(/ )] 1}
ddT0(2)
Now
V
T
is given by the equation
=
V
NKT
q
tS
(3)
Embedding (1)–(3), the current equation for a single PV cell (N
S
=
1) can be obtained as
⎜⎟
=−
⎧
⎨
⎩⎛
⎝+⎞
⎠−⎫
⎬
⎭−+
II Io qV I Rs
aKT
VRsI
Rp
exp ()
1
pv pvn
pv pv pv pv
(4)
From (4), SD model has five unknown parameters; IPV
n
,
I
0,
R
S
,
RP
and
a
.
2.2. Double diode PV model
The sole difference between DD model and SD model is the presence
of an additional diode, ‘D
2
’as depicted in Fig. 3. The presence of second
diode imparts a better accuracy to the model especially at low irra-
diance levels when compared to the SD model. The diode D
2
is in co-
operated in the model to represent the recombination losses occurring
in the depletion layer during low irradiance levels.
Here the output current, Ip
v
is given by [1–3] as;
=−−−+
II II VIRs
Rp
pv pvn d d
pv pv
12 (5)
The diode currents I
d1
and I
d2
are given as
⎜⎟
=⎡
⎣
⎢⎛
⎝+⎞
⎠−
⎤
⎦
⎥
II qV I R
aNV
exp ()
1
dO
pv pv S
St
11
1(6)
⎜⎟
=⎡
⎣
⎢⎛
⎝+⎞
⎠−
⎤
⎦
⎥
II qV I R
aNV
exp ()
1
dO
pv pv S
St
22
2(7)
Hence, for a PV cell (N
S
=1), the output current equation can be de-
rived as:
⎜⎟
⎜⎟
⎜
⎟
=⎧
⎨
⎩−⎡
⎣
⎢⎛
⎝+⎞
⎠−⎤
⎦
⎥
−⎡
⎣
⎢⎛
⎝+⎞
⎠−⎤
⎦
⎥⎫
⎬
⎭−⎛
⎝+
⎞
⎠
III qV I R
aV
IqV I R
aV
VIR
R
exp ()
1
exp ()
1
pv pvn O
pv pv S
t
O
pv pv S
t
pv pv S
P
1
1
2
2(8)
From (8) it is clear that the DD model has seven unknown para-
meters namely IPV
n
,
I
0
1
,
I
0
2
,
R
S
,
RP
,a
1
and a2. As explained above each
parameter is highly dependent to Irradiation levels and temperature
[17].
3. PV parameter extraction
PV model plays an inevitable role in simulation analysis, design
optimization and fault diagnosis of any PV system. Further, the ability
of the PV model to replicate accurate I-V characteristics under all in-
solation and temperature profiles is of extreme significance. However,
the accurate I-V curve emulation entirely depends on the precision of
the unknown model parameters deermined. Moreover, these values are
neither readily available in manufacturer datasheet nor it can be found
using simple calculations. In addition, the presence of noise in the ex-
tracted synthetic data adds to the difficulty. With manufacturers only
providing experimental I-V curve for Standard Test Conditions
(1000 W/m
2
and 25 °C), the process of identifying model parameters
utilizing a suitable strategy becomes extremely indispensable. This high
potential research area is commonly referred as “PV parameter identifi-
cation problem”. Here, the term parameter identification refers to the
process of finding out the unknown model parameters indicated in Eqs.
(4) and (8). The complete cycle of parameter extraction process and the
commonly identified parameters along with the manufacturer data is
illustrated in Fig. 4 and Table 1 respectively.
As mentioned earlier, estimating PV model parameters is a stren-
uous and difficult assignment due to: 1) Minimal amount of data
available, 2) Ample number of unknowns and 3) Complex mathematical
Fig. 1. PV modeling.
D.S. Pillai, N. Rajasekar Renewable and Sustainable Energy Reviews xxx (xxxx) xxx–xxx
3

computations. Hence, over the decades, to resolve the problem of
parameter identification, researchers have made use of several ap-
proaches. Initially, analytical methods were used to extract model
parameters by utilizing a series of interdependent mathematical equa-
tions to co-relate between different model parameters [18–40]. Most of
them use: 1) short-circuit current, 2) open-circuit voltage and 3) max-
imum power point voltage and current along with the manufacturer
data to derive suitable equations. However, solving these equations
mathematically consumes monumental time and effort. On the other
hand, introduction of metaheuristic algorithms brought a radical
change in the way researchers approached the PV model parameter
estimation problem. These metaheuristic algorithms transformed the
difficult model parameter identification problem to a simple non-linear
constrained optimization problem. The colossal benefits of using me-
taheuristic algorithms are: 1) Superior accuracy, 2) Flexibility to adopt.
The additional advantage of these methods in case of parameter iden-
tification is its capability to match the actual curve with minimal error
via curve fitting technique. This approach made the method extremely
superior to analytical methods. At the same time, it should be empha-
sized that analytical methods are handy if there are only a few unknown
parameters. Sometimes, to reduce the computational burden, merging
an analytical method with a metaheuristic algorithm proved to be ad-
vantageous. Similarly, combining two optimization algorithms have
also led to improvement in accuracy. Thus the solutions to the broad PV
parameter extraction problem can be categorized into three: 1) Ana-
lytical methods, 2) Metaheuristic optimization and 3) Hybrid methods.
The steps involved in solving parameter identification problem can be
illustrated using Fig. 5. To handle the voluminous data's of the methods
involved, this paper focuses on briefing the different metaheuristic al-
gorithms and its hybrid versions; while only a short description about
the analytical methods is added for the basic understanding.
3.1. Analytical approach for PV parameter extraction
Analytical methods rely on deriving necessary mathematical equa-
tions in order to realize PV characteristics. In a mathematical sense, for
solving an equation with ‘n’number of unknowns, at least ‘n’equations
are necessary. For instance, identifying SD model and DD model para-
meters require at least five and seven equations accordingly. The idea
behind formulating these equations can be explained with the help of a
single diode ‘
R
S
’model. Further, the same can be extended to con-
ventional SD and DD models as well. A single diode ‘
R
S
’model is a
simplified form of conventional SD model where the parameter ‘
RP
’in
the SD model tends to infinity. Hence, the current through the parallel
RP
branch in the current Eqs. (1) and (4) are eliminated for this model.
The modified output current equation now reduces to;
⎜⎟
=−
⎧
⎨
⎩⎛
⎝+⎞
⎠−⎫
⎬
⎭
II Io qV I Rs
aKT
exp ()
1
pv pvn
pv pv
(9)
There are four unknown parameters in a single diode ‘
R
S
’model is;
‘IPV
n
’
,
‘
I
0’,‘
R
S
’and ‘
a
’. To solve for these unknown parameters at least
four equations are necessary.
From the maximum power point in the I-V curve,
==IIVV
pv MP pv MP,
,
=−
⎧
⎨
⎩⎛
⎝+⎞
⎠−⎫
⎬
⎭
IIIo qV I Rs
aKT
exp ()
1
MP pvn MP MP
(10)
With the help of the short-circuit point;
==IIV0
pv SC pv,
=−
⎧
⎨
⎩⎛
⎝⎞
⎠−⎫
⎬
⎭
II Io qR I
aKT
exp 1
SC pvn SSC
(11)
From the open circuit point in the I-V curve;
==IVV0,
pv pv O
C
;
⎜⎟
=−
⎧
⎨
⎩⎛
⎝+⎞
⎠−⎫
⎬
⎭
IIo qV I Rs
aKT
0
exp ()
1
pvn
OC pv
(12)
Combining (10) and (11),(13) and (14) can be derived as
Rs
Rp
Ipvn
(Iph)
Id
Ipv
Vpv
+
-
D
Fig. 2. Single diode model.
Rs
Rp
Ipvn
(Iph )
Id1
Ipv
Vpv
Id2
+
-
D1 D2
Fig. 3. Double diode model.
Data from
Manufacturer
Sheet
Initialization
Parameter
Identification
Method
Model
Parameters
Fig. 4. Cycle of parameter extraction.
Table 1
Model parameters and its availability.
Parameters
Manufacturer Data Sheet V
OC
I
SC
I
MP
V
MP
P
MP
K
i
K
v
PV Model Parameters
II()
PVn ph
I
01
I
02
a
1
a
2
R
S
R
P
Analytical Method Mathematical
Equations
PV Model
Metaheuristic
Optimization
Objective
Function
[ MPP ]
Objective
Function
[ Error ]
Extracted
Parameters to
Model
Fig. 5. Steps for parameter identification.
D.S. Pillai, N. Rajasekar Renewable and Sustainable Energy Reviews xxx (xxxx) xxx–xxx
4

=−
() ( )
II
exp exp
OSC
qV
aKT
qR I
aKT
OC S SC
(13)
=⎡
⎣
⎢
⎢
⎢+⎡
⎣−⎤
⎦
−
⎤
⎦
⎥
⎥
⎥
()
() ( )
II
I
1
exp 1
exp exp
PVn SC
SC
qR I
aKT
qV
aKT
qR I
aKT
SSC
OC S SC
(14)
At MPP, the derivative of the output power with respect to the
voltage must be zero. Hence, at the maximum power point;
==+=
dP
dV
dV I
dV VdI
dV I
() 0
MP MP MP MP (15)
=−
i
edI
dV
I
V
.. MP
MP (16)
Combining (16) and the derivative of (9) with respect to V
pv,
−=⎡
⎣⎤
⎦
⎡
⎣⎤
⎦−
+
+
I
V
exp
exp 1
MP
MP
qI
aKT
qV R I
aKT
qI
aKT
qV R I
aKT
()
()
OMPSMP
OMPSMP
(17)
Thus, by analytical approach, the parameter extraction of a single
diode ‘
R
S
’model can be executed by solving the four Eqs. (12)–(14) and
(17) [30–32]. It is noteworthy to mention that, instead of Eq. (17),
either one of the two slope equations derived at the open circuit point
or the short circuit point in the I-V curve can also be used to extract the
model parameters [33]. The same procedure can be adopted for SD and
DD models except that it requires some additional equations to extract
the parameters. For instance, for the conventional SD model, both the
slope equations (
R
R,
SO P
O
) are used along with the equations at the
open circuit, short circuit and maximum power points [19–21,34–40].
While, to extract the model parameters for a DD model, an additional
equation is derived using the assumption that the sum of the ideality
factors of the two diodes D
1
and D
2
is 3 [23–27]. For a detailed study on
analytical methods readers can refer to [14]. To conclude, the following
disadvantages limit the adaptability of analytical methods towards
parameter identification problem.
➣Involved complex mathematical expressions and computations.
➣Monumental time consumption in solving the equations.
➣Convergence is not always guaranteed.
➣Assumptions made for simplification significantly affect the accu-
racy of the parameters extracted.
➣Difficult to apply for improved PV models as the mathematical
formulations will be highly complex.
3.2. Metaheuristic algorithms for PV parameter Identification
Metaheuristic algorithms, in last few decades, have gained immense
momentum for solving complex multi objective optimization problems
in various engineering disciplines [41–44]. The enormous capability in
finding potential solutions provoked its importance towards PV para-
meter identification problem. The evolution of metaheuristic algo-
rithms started with Genetic Algorithm (GA) followed by Differential
Evolution (DE) and Particle Swarm Optimization (PSO). Inspired by
these basic algorithms, several new and hybrid metaheuristic algo-
rithms were developed in recent years [45–81]. Some prominent ob-
jective functions utilized by various metaheuristic algorithms for PV
parameter optimization are: 1) Root Mean Squared Error (RMSE)
[48,51–57,60,62–71,73,74], 2) Mean Squared Error (MSE) [45,59,72],
3) Absolute Error (A.E) [46,58,75,76] and 4) Derivative at maximum
power point (MPP) [60,67]. In this section, basic theory of every me-
taheuristic algorithm and its improved variants are outlined for fun-
damental understanding. Further, the performance of each algorithm is
reviewed based on: 1) Type of approach, 2) Compatibility towards
parameter identification, 3) Accuracy, 4) Convergence speed and 5)
Range of parameters set. In literature, as shown in Table 2, it can be
observed that each algorithm has used numerous solar cells/modules to
validate their results. However, for brevity, the ranges set and the
identified parameters are shown only for either one of the cells/mod-
ules used by each algorithm and the inferences discussed are identical
for other cells/modules as well. Moreover, a detailed analysis based on
all the cells/modules used for parameter identification is presented in
Section 4. The validating conditions of each method have also been
taken into account for a better evaluation on the performance various
algorithms.
3.2.1. Genetic algorithm (GA)
GA is a bio-inspired population-based algorithm which replicates
the phenomenon of ‘survival of the fittest’[82].The formulation of
objective function involves expressing the decision variables that are
encoded as chromosomes. An iteration based control strategy is fol-
lowed to improve the quality of each chromosome (solution). Based on
the fitness value of an offspring, the quality of the solutions is eval-
uated and offsprings for further iterations is chosen. Several works on
GA for the non-linear optimization of PV parameter estimation problem
is presented in [83,84]. GA follows three main steps; selection, cross-
over and mutation
1. Selection: Initially, solutions are randomly generated and the fitness
of each solution is evaluated. After selection, only fitter chromo-
somes are selected for the next generation.
Table 2
Cells/modules used for parameter identification.
Refs. Tested cells/Modules
[46] Sanyo HIT215, KC200 GT and ST40 PV Modules
[47] KC 200GT, ST40 and E20/333 PV Modules
[48,51,60,63,65,66,68,73–75,77] 57 mm dia RTC France Solar Cell
[49] SM 55 PV Module, Thin film ST40 PV Module, S75 Solar Module
[51,59,64,72,75] 57 mm dia RTC France Solar Cell, Photo watt PWP201 PV Module
[52] SL80CE Solar Cell, Photo watt PWP201 PV Module
[53] S75, SM55, S115, SQ150 PC, ST36 and ST40 PV Modules
[55] 57 mm dia RTC France Solar Cell, KC200GT and PWP201 PV Modules
[56] 5 W CuInSe2 Solar Cell, 50 W mono-Si and 50 W multi-Si PV Modules
[61] Kyocera KD210GH-2PU, Shell SP-70, Shell SQ-85 and ST-40 Thin Film PV Modules
[67] S36, SM55 and ST40 PV Modules
[70] 57 mm dia RTC France Solar Cell, Photo watt PWP201, S75, SM40, SM55, KC200 GT and ST40 PV Modules.
[71] 57 mm dia RTC France Solar Cell, KC200GT, SM55 and ST-40 Thin Film PV Modules
[73] Kyocera KC120 PV Module
[79] OST 80 Solar Cell, SM55 PV Module
[80] S36 PV Module, SP 70 PV Module, SM55 PV Module, KC200 GT PV Module
D.S. Pillai, N. Rajasekar Renewable and Sustainable Energy Reviews xxx (xxxx) xxx–xxx
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%