Conception RF : Support de cours sur les systèmes radiofréquences
Telechargé par
Sonia Eloued

!!
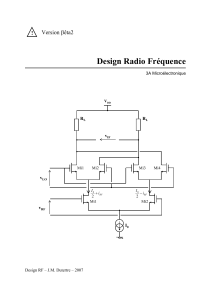
Design Radio Fréquence
3A Microélectronique
v
LO
Mt1
V
DD
R
L
R
L
I
0
v
RF
Mt2
v
IF
Mi1 Mi2 Mi3 Mi4
RF
i
I+
2
0RF
i
I−
2
0
Design RF – J.M. Dutertre – 2007
Version
β
êta2

Design RF 3A Micro
www.emse.fr/~dutertre/enseignement.html - 2007 2

Design RF 3A Micro
www.emse.fr/~dutertre/enseignement.html - 2007 3
Design Radio Fréquence.
I. Introduction.
Les systèmes Radio Fréquence (RF) sont d’une grande complexité. Cette complexité est liée
en partie au grand nombre de transistors contenus dans ces circuits (jusqu’à plusieurs
millions) mais également à l’ensemble des concepts techniques mis en œuvre.
L’architecture "classique" d’un système RF (cf. figure I.1) peut se décomposer sommairement
entre une partie RF et une partie bande de base (Base Band ou BB en anglo-américain
1
).
Partie
RF
Partie
Bande de
Base
Antenne
Fig. I.1 – Traitement analogique.
La partie RF (ou Front End RF) traite des signaux analogiques (et ce même si la modulation
utilisée est dite numérique) à des fréquences élevées, leur spectre n’est pas centré sur zéro ;
par opposition avec la bande de base qui traite des signaux BF (basse fréquence) ayant un
spectre centré sur, ou proche de, l’origine. La bande de fréquence RF s’étend de quelques
centaines de kHz à quelques GHz.
Si la partie bande de base est la plus complexe en terme de nombre de transistors, c’est
cependant la partie RF la plus difficile à concevoir. Cette dernière fait en effet appel à des
domaines d’études multidisciplinaires (théorie du signal, approche système, design,
technologie de fabrication, etc.) ; les choix de design résultent le plus souvent de compromis
entre des contraintes plus ou moins antagonistes (bruit, puissance, consommation, gain,
linéarité, etc.) pour lesquels il n’existe pas de critères de choix totalement objectifs.
Enfin, les outils de CAO sont peu faciles à utiliser et pas toujours bien adaptés. Ils doivent
prendre en compte les problèmes de non linéarités, de translation de fréquence, de variation
des modèles dans le temps, etc. Ainsi, l’analyse fréquentielle classique de type AC proposée
par Spice, qui utilise des modèles linéarisés autour d’un point de polarisation et invariants
dans le temps, n’est elle pas adaptée à l’étude des systèmes RF. Des outils spécifiques de
simulation RF ont été développés tels que Spectre RF pour Cadence et Harmonic Balance
pour Agilent – ADS.
1
Les termes techniques de ce cours sont le plus souvent donnés en langue anglaise, selon la terminologie
rencontrée dans les notes techniques, et les publications et la littérature scientifiques.

Design RF 3A Micro
www.emse.fr/~dutertre/enseignement.html - 2007 4
Choix du format de transmission : analogique / numérique ?
Architecture analogique (approche historique) : un émetteur – récepteur RF comporte un
émetteur (ou transmitter) aussi appelé chaîne Tx (cf. figure I.2). Très schématiquement, le
signal issu d’un micro est modulé et translaté à la fréquence d’une porteuse RF, puis amplifié
avant d’attaquer l’antenne.
Modulation PA
Ampli. de puissance
PA : Power Amplifier
porteuse RF
(100
aine
Hz 2,5 GHz)
Micro.
Fig. I.2 – Emetteur RF analogique.
Il comporte également un récepteur (ou receiver) parfois appelé chaîne Rx (cf. figure I.3).
LNA
Ampli. faible bruit
LNA : Low Noise Amplifier
downconverter
translation vers les
fréquences basses
porteuse
Démodulation
ampli.
audio H. P.
Fig. I.3 – Récepteur RF analogique.
Le signal RF capté par l’antenne est amplifié par un amplificateur faible bruit, translaté vers la
bande de base par le "downconverter", puis démodulé et amplifié avant d’attaquer un haut
parleur.
La contraction de "transmitter"et de "receiver" donne le terme "transceiver" utilisé pour
désigner un émetteur – récepteur.
L’architecture des transceiver analogiques comporte peu de composants, ils sont
"relativement simples" à concevoir.
Architecture numérique :
PA
porteuse RF
CAN Compression Codage -
Entrelacement CNA
Partie numérique
Numérisation
de la voix
upconverter
translation vers la
fréquence RF
Fig I.4 – Emetteur RF numérique.

Design RF 3A Micro
www.emse.fr/~dutertre/enseignement.html - 2007 5
Un transceiver RF numérique transmet un signal RF analogique modulé numériquement. Il
est contitué d’une partie émettrice (cf. Fig. I.4) et d’une partie réceptrice (cf. Fig. I.5). Elles
comportent toutes deux une partie numérique importante.
LNA downconverter
porteuse
Démodulation
ampli.
audio
H. P.
CAN Décodage
DécompressionCNA
Partie numérique
Fig. I.5 – Récepteur RF numérique.
A première vue l’architecture d’un transceiver RF numérique semble bien plus complexe,
c’est effectivement le cas.
Cependant les techniques de traitement numérique du signal misent en œuvre (codage,
entrelacement, compression, etc.) permettent de minimiser les erreurs de transmission (elles
sont mesurées par le BER ou Bit Error Rate, c'est-à-dire le taux d’erreur binaire) et de réduire
la bande passante de la transmission en réduisant le débit des informations à transmettre (le
bit rate). Hors, le spectre de fréquence disponible est limité, d’où l’intérêt d’en limiter la
partie dévolue à chacun des utilisateurs (ce que permet l’approche numérique).
Le design d’un transceiver numérique est conceptuellement plus complexe, cependant, les
avantages cités précédemment (parmi d’autres) on fait que l’approche numérique s’est
imposée.
Objectifs de cours.
Ce cours est dédié à une première approche (rapide) de la conception des front end RF
numériques.
La partie II est dédiée à la présentation des concepts de base nécessaires à leur étude.
Enfin, la partie III présente deux blocs élémentaires des front end RF : l’amplificateur faible
bruit et le mixer.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
/
45
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)




