Chapitre 3 : Modélisation dynamique de la machine synchrone triphasée
Electrotechnique avancée Page : 54 Proposé par M : SOYED Abdessami
Chapitre 3 : Modélisation dynamique de la machine synchrone
triphasée
Objectifs:
Modéliser la machine synchrone dans le repère de Park,
Modéliser la machine synchrone à rotor bobiné dans le repère de Park,
Etablir les différents modèles de la machine synchrone à aimant permanant,

Chapitre 3 : Modélisation dynamique de la machine synchrone triphasée
Electrotechnique avancée Page : 55 Proposé par M : SOYED Abdessami
1. Modélisation et commande de la machine synchrone à aimant permanent
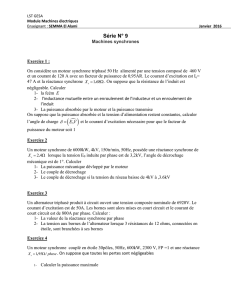
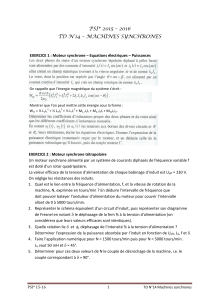
1.1. Description de la machine synchrone triphasée à aimant
La machine synchrone diffère par rapport à celui de la machine asynchrone au niveau du rotor,
ce dernier est constitué par:
Une à réluctance variable (cas d’une machine synchrone à pôles saillants avec ou sans
excitation),
Un circuit magnétique à réluctance constante (cas d’une machine synchrone à pôles lisses
avec excitation),
Un aimant permanent.
Fig.3.1: Machine synchrone à aimant permanent enterré et superficiel
1.2. Hypothèses
On suppose que :
Le circuit magnétique de la machine n’est pas saturé et qu’il n’y a pas de présence des
phénomènes d’hystérésis, donc les inductances deviennent constantes,
La répartition du champ magnétique dans l’entrefer de la machine est sinusoïdale,
L’effet de peau (pédiculaires) est négligeable, donc les résistances de la machine sont
considérées comme des constantes.

Chapitre 3 : Modélisation dynamique de la machine synchrone triphasée
Electrotechnique avancée Page : 56 Proposé par M : SOYED Abdessami
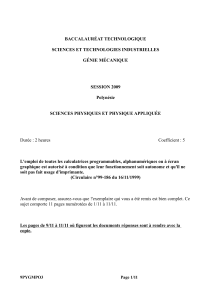
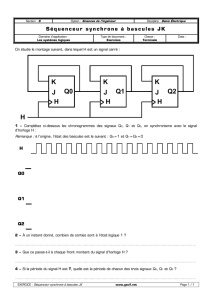
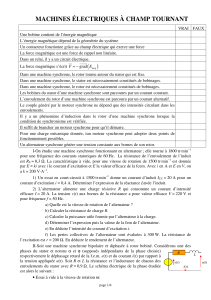
1.3. Représentation de la machine synchrone dans les repères (abc, dq0)
Fig.3.2: Représentation de la machine synchrone dans le repère (abc)
Fig.3.3: Représentation de la machine asynchrone dans le repère (dq0)
0
a
v
a
b
c
c
v
b
v
q
d
p
ω
N
S
d
v
q
i
d
i
a
q
v
q
d
0
s
R
d
L
f
s
R
q
L
p
ω

Chapitre 3 : Modélisation dynamique de la machine synchrone triphasée
Electrotechnique avancée Page : 57 Proposé par M : SOYED Abdessami
1.4. Relation des fréquences
Le champ magnétique tournant ( s
H
) crée par les phases du stator tourne à la pulsation dénotée
(
s
ω
). Le champ magnétique tournant ( r
H
) crée par l’aimant permanent (rotor ou roue polaire)
tourne à la pulsation dénotée (
r
ω
). La condition des fréquences de la machine synchrone en
régime quelconque vaut électriquement:
s r
ω =ω
, et vaut mécaniquement: s
s
ω=
Ω
p.
1.5. Equations de fonctionnement réelle de la machine
Les équations de fonctionnement du moteur, par application de la loi de faraday sont :
abc s abc abc
d
v =R . i + Φ
dt
3.1
Les équations des flux sont données par :
fsrabcsabc ΦMi.Φ
3.2
Avec
m 0 m 0 m 0
a ab ac
s ab b bc m 0 m 0 m 0
ac bc c
m 0 m 0 m 0
2
π 2π
L +L cos(2
θ) M +M cos(2θ- ) M +M cos(2θ+ )
3 3
L m m 2π 2π
= m L m = M +M cos(2
θ- ) L +L cos(2θ+ ) M +M cos(2θ)
3 3
m m L 2π 2π
M +M cos(2
θ+ ) M +M cos(2θ) L +L cos(2θ- )
3 3
sr sf
cos(
θ)
2
π
M =M cos(2
θ- )
3
2
π
cos(2
θ+ )
3

Chapitre 3 : Modélisation dynamique de la machine synchrone triphasée
Electrotechnique avancée Page : 58 Proposé par M : SOYED Abdessami
1.6. Equations de fonctionnement de la machine dans le repère de Park
f
dq0 s dq0 d q 0 dq0 d q 0 dq0 f
dΦdθ
0 0
dt dt
d d
θ dθ
v =R i + L L L i + L L L - 0 0 i + Φ
dt dt dt
0 0 0 0
Avec
d m m 0
q m m 0
0 m m
3
L = L -M + L
2
3
L = L -M - L
2
L = L +2M =0
3.3
Equations des tensions
d
d S d r q
q
q S q r d
dΦ
v =R i + -
ω Φ
dt
dΦ
v =R i + +
ω Φ
dt
3.4
Equations des flux
d d d f
q q q
Φ =L i +Φ
Φ =L i
3.5
Equations du couple
e d q q d
e d q d q f q
T =p(Φ i -Φ i )
T =p[(L -L )i i +
Φ i ]
3.6
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%