Machines synchrones

page 1/4
MACHINES ÉLECTRIQUES À CHAMP TOURNANT
VRAI FAUX
Une bobine contient de l’énergie magnétique
L’énergie magnétique dépend de la géométrie du système
Un contacteur fonctionne grâce au champ électrique qui exerce une force
La force magnétique est une force de rappel non linéaire.
Dans un relai, il y a un circuit électrique.
La force magnétique s’écrit
(
)
grad
mag
F E= −
Dans une machine synchrone, le rotor tourne autour du stator qui est fixe.
Dans une machine synchrone, le stator est nécessairement constitués de bobinages.
Dans une machine synchrone, le rotor est nécessairement constitués de bobinages.
Les bobines du stator d’une machine synchrone sont parcoures par un courant constant.
L’enroulement du rotor d’une machine synchrone est parcouru par un courant alternatif.
Le couple généré par le moteur synchrone ne dépend que des intensités circulant dans les
enroulements.
Il y a un phénomène d’induction dans le rotor d’une machine synchrone lorsque la
condition de synchronisme est vérifiée.
Il suffit de brancher un moteur synchrone pour qu’il démarre.
Pour une charge mécanique donnée, iun moteur synchrone peut adopter deux points de
fonctionnement possibles.
Un alternateur synchrone génère une tension constante aux bornes de son rotor.
I-On étudie une machine synchrone fonctionnant en alternateur ; elle tourne à 1800 tr
⋅
min–1
pour une fréquence des courants statoriques de 60 Hz. La résistance de l’enroulement de l’induit
est
R
S = 0,3
Ω
. La caractéristique à vide, pour une vitesse de rotation de 1500 tr
⋅
min–1 est donnée
par
E
=
ki
avec
i
le courant d’excitation et
E
la valeur efficace de la fcem. Avec
i
en A et
E
en
V
, on
a
k
= 200 V
⋅
A–1.
1) Un essai en court-circuit à 1500 tr
⋅
min–1 donne un courant d’induit
I
CC = 20 A pour un
courant d’excitation
i
= 0,4 A. Déterminer l’expression de la réactance
Lω
de l’induit.
2) L’alternateur alimente une charge résistive
R
qui consomme un courant d’intensité
efficace
I
= 20 A. La tension
v
(
t
) aux bornes de la résistance a pour valeur efficace
V
= 220 V et
pour fréquence
f
= 50 Hz.
a) Quelle est la vitesse de rotation de l’alternateur ?
b) Calculer la résistance de charge
R
.
c) Calculer la puissance utile fournie par l’alternateur à la charge.
d) Déterminer l’expression puis la valeur de la fem de l’alternateur.
e) En déduire l’intensité du courant d’excitation
i
.
f) Les pertes collectives de l’alternateur sont évaluées à 300 W. La résistance de
l’excitation est
r
= 200
Ω
. En déduire le rendement de l’alternateur.
II-Soit une machine synchrone bipolaire et diphasée à rotor bobiné. Considérons une des
phases du stator et notons
α
et
ϕ
(supposés indépendants de la phase choisie)
respectivement le déphasage retard de la f.e.m.
e
(
t
) et du courant
i
(
t
) par rapport à
la tension appliquée
u
(
t
). Soit
R
et
L
la résistance et l’inductance de chacun des
enroulements du stator avec
R
= 0,9
Ω
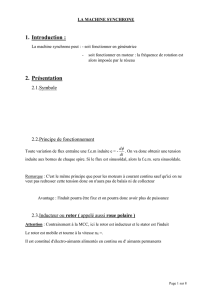
. Le schéma électrique de la phase étudiée
est alors le suivant :
•
Essai à vide à la vitesse de rotation
ω
:
e(t)
R
L
i(t)
u(t)

page 2/4
tension efficace
U
V = 220 V; courant d’excitation
I
EV = 4,0 A.
Essai en court-circuit à la vitesse de rotation
ω
:
courant d’excitation
I
ECC = 1,0 A; courant en ligne efficace:
I
CC = 3,5 A.
1) La machine fonctionne en alternateur.
a) Que signifie ici « essai à vide » ete « essai en court-circuit » ? À quels courants
correspondent les appellations « courant en ligne » et « courant d’excitation ».
b) Montrer que la f.e.m. induite dans une bobine du stator peut s’écrire
e
(
t
) =
E
2
sin(
ωt
) avec
E
=
K
.
I
E.
ω
.
c) Avec l’essai à vide, déterminer le produit
Kω
.
d) Avec l’essai court-circuit, calculer la réactance
Lω
. Montrer que
R
<<
Lω.
(On
négligera
R
dans la suite.)
2) La machine fonctionne en moteur. En régime nominal, chaque phase fonctionne sous une
tension de valeur efficace
U
EFF = 190 V et de fréquence 50 Hz; le stator absorbe une puissance
P
= 1,0 kW avec un facteur de puissance cos(
ϕ
) = 0,87. On néglige les frottements mécaniques.
a) Calculer l’intensité efficace en ligne
I
EFF.
b) En faisant un bilan de puissance, calculer le moment du couple électromagnétique
appliqué à l’arbre du moteur.
c) Tracer le diagramme de Fresnel relatif au courant et à la tension dans le cas où
ϕ
> 0.
d) Déterminer la valeur efficace de la fem, notée
E
.
e) Établir la relation
U
EFF.cos(
ϕ)
=
E
.cos(
α)
où
α
est le déphasage entre
i
(
t
) et
e
(
t
).
3) Le moteur est alimenté par un convertisseur continu/alternatif alimenté sous la tension de
valeur moyenne
U
A =
3 6
π
ϕU
EFF
cos( ). Un capteur de position fixé sur le rotor commande une
boucle de régulation qui permet de maintenir l’angle α constant quelle que soit la vitesse de rotation
ω de l’arbre. De même, la fréquence du courant dans les phases de l’induit est asservie à ω et prend
la même valeur.
a) La f.e.m. E est proportionnelle à la vitesse de rotation et au courant d’excitation.
On pose E = K.I
E
.ω. Calculer numériquement K si E est en Volt et ω en rad.s
–1
en prenant les
valeurs E = 220 V, I
E
= 4 A et ω = 50 rad.s
–1
.
b) Montrer que U
A
= kω. Exprimer k en fonction de K, I
E
et α. Calculer
numériquement k pour I
E
= 4,0 A et α = 30°.
c) On néglige les pertes. Quelle est la puissance fournie par l’alimentation continue
en fonction de k, ω et I
0
, courant entrant dans le convertisseur. Exprimer le couple mécanique fourni
par la machine.
Application numérique: la machine délivre un couple de 6,0 N.m à la vitesse de
1000 tr.min
-1
. Calculer U
A
et I
0
.
d) Cet ensemble est parfois appelé « machine à courant continu synchrone
autopilotée » ou « machine à courant continu sans balais ». Quels sont ses avantages par rapport à la
machine à courant continu classique ?
III-Un moteur synchrone monophasé possède un stator de résistance R négligeable et
d’inductance L. Son stator est alimenté par un courant de valeur efficace I et de fréquence ω, sous
une tension efficace U. La f.e.m. induite dans le stator est sinusoïdale de valeur efficace E. Elle est
déphasée de α par rapport à la tension u(t). On note ϕ le déphasage du courant i(t) par rapport à la
tension d’alimentation u(t).
1) Construire le diagramme de Fresnel reliant les amplitudes complexes U, I et E. dans le
cas où α > 0 et ϕ < 0

page 3/4
2) Donner l’expression de la puissance électrique reçue par le moteur (en négligeant la
puissance électrique fournie au rotor) et démontrer qu’elle peut s’écrire P=
U
E
L
ω
αsin
En déduire l’expression du couple électromagnétique Γ en supposant les pertes négligeables.
3) Montrer que si le moteur fonctionne à couple Γ constant, il est possible, en agissant sur le
courant d’excitation I
E
alimentant le rotor, de fixer le signe de ϕ et la valeur du facteur de puissance
cos(ϕ) à une valeur désirée.
IV-Les moteurs linéaires sont caractérisés par l’absence de contact mécanique et l’absence
de transformation de mouvement (on dit aussi qu’ils sont à entraînement linéaire direct), le
mouvement et l’effort étant directement appliqués à la charge sans perte due aux systèmes de
transmission et de conversion de mouvement (rotatif en linéaire, par exemple).
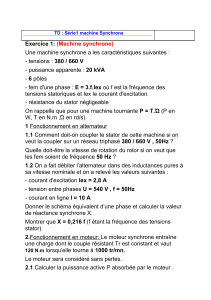
Ils sont constitués (voir figure 1) d’un barreau mobile composé d’aimants permanents à
polarité alternée, entouré d’un bloc moteur (ou carcasse) contenant trois séries de n solénoïdes A
i
, B
i
et C
i
entrelacés parcourus respectivement par les courants i
A
(t), i
B
(t) et i
C
(t).
On note :
z
M
: la distance d’un point M de l’entrefer par rapport à la tête d’un solénoïde pris comme
référence ;
i
n
(t) : l’intensité du courant qui parcourt le solénoïde n, orienté positivement dans le sens
direct autour de l’axe z ; elle est sinusoïdale de pulsation ω ;
( , )
S M
B z t
: le champ magnétique crée
par les solénoïdes au niveau de l’entrefer ;
s
p : le pas (ou période spatiale) égal à
la longueur de deux aimants ;
z(t) : la position par rapport au sol d’un
point du barreau mobile pris comme origine.
B
B
(z
M
, z(t)) : le champ magnétique crée
par les aimants du barreau mobile dans le
référentiel lié au sol.
1) On analyse fréquemment un moteur
électrique linéaire comme un moteur rotatif « déroulé ». Indiquer de quel type de moteur électrique
rotatif le moteur étudié ici est le « déroulé » en précisant ce qui joue le rôle d’inducteur, d’induit, de
couple et de vitesse de rotation.
Les intensités i
B
et i
C
((t)t) sont déphasées de ϕ
Β
et ϕ
C
par rapport à l’intensité
(
)
(
)
cos
A
i t i t
= ω
prise comme référence des phases.
2) En exploitant l’analogie indiquée ci-dessus, donner les valeurs des déphasages ϕ
Β
et ϕ
C
permettant d’obtenir un champ crée par trois solénoïdes successifs de la forme
N N N
N
S S
p
s
z
M
M
z
M
×
z
(t)
r
e
N N N N NS S S SN S S
Carcasse
Solénoide
Noyau
magnétique
A1 B1 C1 A2 B2 C2 A3
Figure 1 : Composition d’un moteur linéaire
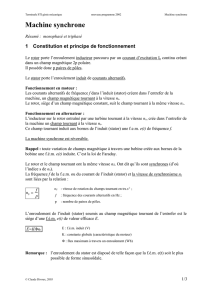
B
B
(z
M
, t = 0)
B
0
z
M
Figure 2 : Évolution de B
B
(z
M
, t = 0)

page 4/4
( )
0
, cos 2
M
S M S
S
z
B z t B t
p
= ω − π
.
On admet que le champ crée par les aimants a pour expression
( )
( )
(
)
(
)
0
0
, cos 2
M
B M B
S
z z t z
B z z t B p
− −
= π
.
3) Que représente z
0
?
On note e l’épaisseur de l’entrefer, supposée très petite devant le rayon r
B
du barreau mobile,
et L = np
S
sa longueur. On rappelle la relation
( ) ( ) ( ) ( )
1
cos cos cos cos
2
a b a b a b
= − +
.
4) Calculer l’énergie magnétique W
MAG
stockée dans l’entrefer et montrer qu’elle est la
somme de trois termes dont un seulement, qui s’écrit
(
)
(
)
0
0 0
0
cos 2
B
S B
S
z t z
r eL B B t p
+
πω − π
µ
,
dépend de z(t). Interpréter chacun des termes.
On généralise la situation de l’actionneur linéaire et l’on admet que la force exercée sur le
barreau mobile s’écrit
MAG
i Cte
W
Fz
=
∂
=∂
.
5) Calculer F(t). Que constate-t-on ?
Cette force n’a d’effet mécanique que si sa valeur moyenne est non nulle.
6) À quelle condition la valeur moyenne de F est-elle non nulle ? Quelle est alors la vitesse
du barreau ? Commenter ce résultat et l’expression de F obtenue dans ce cas.
1
/
4
100%