CHAPÏTRE II
ANALYSE CINEMATIQUE ET SYNTHESE
DES MECANISMES PLANS A COUPLES INFERIEURS
2.1 Genres principaux des mécanismes plans à couples inférieurs
Dans des mécanismes et des appareils on utilise largement divers mécanisme à levier à quatre
chaînons. Tous ces mécanismes sont formés par l’adjonction d’un groupe à double guidage de
IIéme classe (GDG) à un mécanisme initial avec un seul chaînon menant. Prenons
connaissance des mécanismes à quatre chaînons les plus courants.
1. Mécanisme articulé (fig.1.12a). Il contient le mécanisme initial (chaînon 1et 2) et
GDG de la 1ére modification (chaînon 3 et 4). Tous les couples cinématiques sont de
rotation. Le mécanisme peut transformer le mouvement rotatif du chaînon 2 dit
manivelle en mouvement oscillatoire du chaînon 4 dit balancier, et réciproquement.
Parfois le chaînon 2 ne peut accomplir que le mouvement oscillatoire, c’est-à-dire il
est balancier.
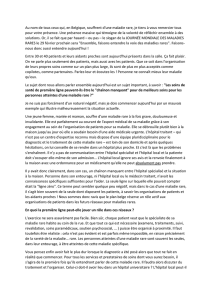
Le Mécanisme articulé à quatre chaînons est très courant dans les machines-outils
différentes. On peut l’utiliser aussi pour obtenir les trajectoires diverses. Si ,par
exemple, on fixe rigidement une pièce 3 sur la bielle 3 (fig.2.1) alors le point E
décrira une courbe fermé dite courbe de bielle. Le mouvement du point E peut être
utilisé dans une machine à pétrir et autres.
2. Mécanisme bielle-manivelle (fig.1). Il en était question plus haut. Il est composé du
mécanisme initial (chaînons 1 et 2 et du GDG de la 2éme modification (chaînon 3 et 4).
Ce mécanisme est utilisé dans des moteurs à combustion interne, pompes à piston,
compresseurs, presses mécanique et autres.
3. Mécanisme à coulisse (fig.2.2). Il se compose du même mécanisme initial et du GDG
de la 3éme modification. Ce mécanisme peut être utilisé pour transformer le
mouvement rotatif de la manivelle 2 en mouvement oscillatoire du chaînon 4 dit
coulisse oscillante. Si on a AC < AB la coulisse accomplira le mouvement de rotation
non uniforme (coulisse rotative).
les mécanismes à coulisse sont appliqués dans des machines à raboter (étau-limeurs) et à
mortaiser, transporteurs, machines à coudre et autres.
On utilise dans des machines et des appareils un grand nombre de mécanismes à levier à
six chaînons. On forme ces mécanismes à partir d’un mécanisme initial à un chaînon menant
par l’adjonction de deux groupes à double guidage de IIéme classe (fig.1.12b ) ou d’un groupe
à triple guidage de IIIéme classe (fig.2.3). L’application des mécanismes à 6 chaînons permet
d’obtenir des lois spéciales de mouvement des chaînons menés.
2.2.Objectifs de l’analyse cinématique
Un mécanisme peut fonctionner normalement si le caractère du mouvement des
organes de travail correspond à la destination du mécanisme. Pour étudier le mouvement des
organes de travail on fait l’analyse cinématique.
L’analyse cinématique a pour but :
1. Détermination des positions des chaînons menés en fonction de la position du chaînon
menant.

2. Détermination des déplacements des chaînons menés en fonction du déplacement du
chaînon menant.
3. Détermination des vitesse et des accélération des points et des chaînons d’un mécanisme
sur la base de la loi donnée de mouvement du chaînon menant.
4. construction des trajectoires de certains points du mécanisme.
Il existe les méthodes graphiques et analyse. Les premiers sont exactes mais moins
exactes, les deuxièmes sont exactes mais exigent beaucoup de calcule surtout pour des
mécanisme compliqués. Prenons connaissance de ces méthodes.
2.3 construction des position des mécanismes
les problèmes1,2 et 4 peuvent être résolus graphiquement par la construction des positions
du mécanisme considérons comment cela se fait sur l’exemple d’un mécanisme de II-éme
classe (fig.2.4 ).
Données : schéma cinématique du mécanisme ; dimensions du schéma LAB,LCD,LBC, ect ;
positions du chaînon menant
On demande : construire les positions de tous les chaînon.
Ordre de construction :
1. on détermine la structure du mécanisme. On établit que le mécanisme donné est composé
du mécanisme initial ( chaînon 1 et 6 ) du groupe D’Assour . de II-éme classe de 1ére
modification ( chaînon 2 et 3 ) et du groupe d’Assour de II-éme classe de 2-éme
modification ( chaînon 4 et 5 ).
2. on choisit l’échelle du schéma m/mm et on calcule les segments représentant toute les
longueurs. Soient les longueurs réelles :
3. sur la droit X – X choisit arbitrairement on marque les centre des articulation immobiles
A et D.
4. on trace les trajectoires décrites par les centre des articulations mobiles B,C et E. ce sont
le cercle de rayon AB, l’arc de rayon DC et la droite X1 –X1
5. on marque la position donné AB1 du chaînon menant.
6. on construit les positions correspondantes B1C1 et C1D des chaînons du 1-ére GDG.
Pour trouver le point C1 de B1 comme centre on d’écrit l’arc de cercle de rayon BC.
7. on construit les positions des chaînons du 2-éme GDG. Pour trouver le point E1 , de C1
comme centre on décrit l’arc de cercle de rayon BC.
De même manière on construit la position AB2C2DE2 , etc.
La construction des chaînons menés à partir de la position initiale. On aura la position
initiale quand la droite BC est confondue avec la droite AB. C’est l’une des
deux positions extrêmes du mécanisme. On a la seconde position extrême
quand la droite BC est le prolongement de la droite AB. Ayant construit par exemple la
position initiale du point E du coulisseaux 5, on a les déplacements, ,etc. à
l’échelle du schéma.
2.2 diagrammes cinématique.
on appelle diagrammes cinématique les coures exprimant la dépendance de l’espaces
parcouru ( dans déplacements ), de la vitesse et de l’accélération d’un chaînon quelconque en
fonction du temps : , . on utilise souvent ces

diagrammes pour examiner les mouvement des chaînons menés, ayant le mouvement donné
du chaînon menant.
Considérons le cas quand le chaînon mené est une manivelle tournant uniformément, c’est-à-
dire il tourne des angles égaux pour les intervalles égaux du temps.
A . construction du diagramme
Pour le construction on emploie les déplacement du chaînon considéré qui sont obtenu sur le
dessin des positions, par exemple , , etc. sur la fig.2.4.
Soit à établir le diagramme de l’espace du coulisseau 5. Ordre de construction:
1 . on construit plusieurs positions du mécanisme, d’habitude 12 y compris initiale, en
donnant au chaînon menant les positions équidistantes ( tous les de l’angle de rotation ).
2 . on trace les axes de coordonnées [ ] ( fig.2.5 ) et on porte sur l’axe T douze
segment «égaux de longueur arbitraire . ils reporte sentent les angle de ou également
les intervalles de temps crrespondent. Par conséquent on a l’échelle du temps.
Ou T_ temps d’un tour de la manivelle.
N_ nombre de tours de la manivelle par minute.
3 . on choisit une échelle convenable de l’espace parcourue M/MM et on porte sur le
diagramme les déplacements du chaînon considéré à cette échelle :
4 . en joignant les point 0,1,2,3, … à l’aide d’un pistolet obtient la courbe
B . construction des diagrammes V
Si les vitesse et les accélérations sont commues pour les position considérées du mécanisme
alors on peut construire ces courbes par la méthode qui vient d’être exposé. Sinon il est
possible de les déduire par la différenciation graphique. Il y a quelques méthodes de la
différenciation graphique. La plus utilisable est la méthode des cordes. Elle consiste en ce qui
suit.
1. on trace les axes de coordonnées [ ] comme il est fait sur la fig.2.5.
2. d’un point arbitraire A choisit sur l’axe T on trace successivement les rayons A-1,A-2, etc.
qui sont parallèles aux codes 0-1, 1-2 ,….. sur la courbe S= .
3. on porte les ordonnées 0-1 , 0-2 ,…. Aux intervalles correspondants.
4. on trace la courbe passant par les centres des segments horizontale du graphique étagé. On
obtient la courbe de vitesse V=

5. analogiquement on déduit le diagramme d’accélération A= en différenciant la
courbe de vitesse.
Déterminons l’échelle de vitesse. Pour cela écrivons l’équation de la droite passant par une
corde arbitraire ( boit 5 - 6 ).selon la géométrie analytique
Compte tenu des échelles on a
S_ chemin parcouru, T- temps.
En différenciant par rapport au temps, on obtient
D’où
D’autre part du triangle hachuré qui correspond à la corde 5 – 6 on a :
Ainsi
D’ici
De même on peut établir l’échelle d’accélération.

Remarque
Souvent on fait la différenciation par rapport à l’angle de rotation du chaînon menant.
Alors au lieu des vitesses et des accélérations on obtient les diagrammes des dérivées
En fonction de l’angle .
Les dérivées du premier et du deuxième ordre de chemin par rapport à l’angle de rotation
s’appelle respectivement analogue de vitesse et analogue d’accélération. Dans certain cas ces
notion sont importantes et doivent être déterminées au lieu des vitesse et des accélération
La méthode de la différenciation par rapport au reste la même , les échelles étant calculées
d’après les formules analogues :
_ échelle de l’angle de rotation.
Parfois on construit les diagrammes cinématique par la méthode de l’intégration graphique
dont l’ordre est inverse à l’ordre de différenciation.
Supposons qu’il faille déduire la courbe V= quand celle de la vitesse est donnée.
Alors on remplace la courbe V= par le graphique étagé et on porte les ordonnées sur
l’axe V. d’un point a arbitrairement choisi sur l’axe T on mène les rayon A-1,A-2,etc.
Ensuite on mène les dores dans le système de coordonnées [ S,T ] : ( 0-1 ) // ( A-1 ), ( 1-2 ) //
( A-2 ), etc. on obtient les points 0,1,2,….. de la courbe cherchée. La relation entre les
échelles reste la même ( 2.2 ).
2.5 construction des plans de vitesse et d’accélérations.
A . observations préliminaires .
Les vitesses et les points et des chaînons d’un mécanisme plan dans ses positions différentes
peuvent être trouvées à l’aide des plans de vitesses et d’accélérations. Avant d’examiner cette
méthode il faut se rappeler les deux cas possible de la décomposition du mouvement d’un
point.
Selon les théorèmes de la mécanique théorique on a les équations qui suivent.
1 . considérons deux points A et B appartenant chacun au même chaînon ( fig.2.6 ) qui est an
mouvement plan. Dans ce cas la vitesse du point B peut être décomposée en deux
composantes :
où -vecteur vitesse du point A, -vecteur vitesse du point B par rapport au point A. on a
toujours
l’accélération du point B peut être décomposée en trois composantes :
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%