IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 17, NO. 4, JULY 2002 453
A Static Hysteresis Model for Power Ferrites
Paiboon Nakmahachalasint, Student Member, IEEE, Khai D. T. Ngo, Senior Member, IEEE, and Loc Vu-Quoc
Abstract—Basso and Bertotti’s physics-based, yet simple, static
hysteresis model is brought to the power electronic community as
an alternative for simulation of magnetic components embedded
in a power electronic converter. The model is reviewed and its
equations cast in application/simulation-oriented forms. It is then
revised to better characterize the very soft saturation behavior
of commercial power manganese–zinc (MnZn) ferrites. The
procedures to extract the model parameters from voltage and
current measurements are described. The improved models have
been verified against experimental data for major and minor
hysteresis loops of three commercial power ferrites.
Index Terms—Domain-wall, hysteresis modeling, power MnZn
ferrites, preisach model, soft magnetic materials.
NOMENCLATURE
Magnetic flux density.
Magnetic flux density pertaining to a turning
point.
Maximum flux density of the major –
loop.
Remanent flux density.
Saturation flux density.
Magnetic flux density at which is
zero.
Coefficient of the reversible process used in
(1).
flops Number of floating-point operations.
Magnetic field intensity.
Magnetic field intensity pertaining to a
turning point in Fig. 1.
Coercive force.
Magnetic field intensity at which .
Half the width of the elementalhysteresis loop
in Fig. 9(b).
Bias field of the elemental hysteresis loop in
Fig. 9.
Magnetization; .
Saturation magnetization.
Normalized magnetization.
Normalized magnetization pertaining to a
turning point.
Normalized magnetization at which
is zero.
Manuscript received February 19, 2002; revised March 5, 2002. This work
was supported by the National Science Foundation under Grant ECS-9906254,
the State of Florida Integrated Electronics Center, and the Royal Thai Govern-
ment. Recommended by Associate Editor C. R. Sullivan.
The authors are with the Department of Electrical and Computer Engineering,
University of Florida, Gainesville, FL 32611-6200 USA.
Publisher Item Identifier 10.1109/TPEL.2002.801000.
Positive integer of the irreversible process
used in (3).
Parameter used in (7b) for an alternate form of
.
Domain-wall surface function given in (4),
(7a), and (7b).
Parameter used in (4) for .
resnorm Squared 2-norm of the residual from
least-square-fitting.
Mean domain-wall position.
Domain-wall position pertaining to a turning
point in Fig. 1.
Mean domain-wall position of the initial
magnetization curve.
Mean domain-wall position of any return
branch.
Maximum susceptibility used in (1a) and (1b)
for .
Permeability, .
I. INTRODUCTION
HYSTERESISmodels forpowerferritesareanintegralpart
ofa computer-aided design(CAD)system forpowerelec-
tronic converters. The models need to capture the dependence
of hysteresis on such physical phenomena as major loop, minor
loops, irreversible magnetization, reversible magnetization, dy-
namic effects, shape effects, and temperature effects. This paper
deals primarily with static hysteresis at room temperature. The
methods described in [1] and [2] could be used to incorporate
the dependence of the hysteresis phenomena on rate, tempera-
ture, and core shape.
The Stoner–Wolhfarth, Jiles–Atherton, Globus, and Preisach
models are four well-known physics-based macroscopic models
of static hysteresis. Their characteristics and applicability were
discussed and compared in [3]. These models generally do a
better job at describing the major loop than the minor loops
although power electronic transformers and inductors are nor-
mally designed to operate in minor loops. Static hysteresis is
better characterized than dynamic hysteresis although the later
is more pertinent in power converters.
Recently, Basso and Bertotti describes a model that is
physics-based and quite simple to use [4], and that could be
another choice for core models in circuit simulators for power
electronic engineers. This model was experimentally verified
for amorphous and nanocrystalline alloys [5], which exhibited
hard saturation. The applicability of the model to the soft
manganese–zinc (MnZn) power ferrites (e.g., MN8CX ferrite
from Ceramic Magnetics [6]) used in high-frequency power
transformers and inductors was demonstrated in [7].
0885-8993/02$17.00 © 2002 IEEE
Authorized licensed use limited to: University of Florida. Downloaded on January 22, 2009 at 13:53 from IEEE Xplore. Restrictions apply.

454 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 17, NO. 4, JULY 2002
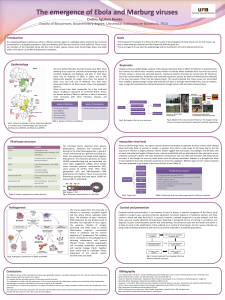
Fig. 1. Mean domain-wall position and – loop for A/m,
(A/m) , .
One objective of the paper is to introduce the Basso–Bertotti
static hysteresis model to the power electronic readers. This is
accomplished in Section II-A and the Appendix, which review
the model described in [4] and [5] from the simulation/applica-
tion standpoint. The second objective of the paper is to describe
a refined Basso-Bertotti model for soft ferrites. This is accom-
plished in Section II-B, which identifies the need to improvethe
original model and suggests the corresponding modifications.
While rigorous implementation of the refined model in a com-
mercial circuit simulator remains a future topic, a numerical al-
gorithm is suggested in Section II-C for the simulationof a static
hysteresisloopusingthemodel. Parameterextractionandexper-
imental verification based on voltage and current measurements
of sample toroids are discussed in Section III. The main results
are summarized in Section IV.
II. MODEL DESCRIPTION AND IMPLEMENTATION
A. Review of Basso–Bertotti Model for Static Hysteresis
Basso–Bertotti’s model for static hysteresis accepts as an
input the applied magnetic field intensity , and outputs the
magnetization (related to the magnetic flux density by
) via an intermediate parameter (the mean
domain-wall position). The model also requires and , the
and of the most recent turning point, which is the tip of a
-loop/branch, to generate the minor and major hysteresis
loops.
From the application standpoint, Basso-Bertotti static hys-
teresis model can be summarized by (1)–(3). (These equations
are derived in the Appendix for those readers interested in the
physics of magnetism.) Let the magnetization process start at
the de-magnetized state with . The “initial mag-
netization curve” is generated by (1a), which computes from
, and (2b), which computes from . For any -branch
with , is found from via (1b) and (2b) in a sim-
ilar fashion. Equation (1) is illustrated in Fig. 1. As explained
in the Appendix, the function is associated with the irre-
versibleprocess. Themodel parameters are (saturationmag-
Fig. 2. Comparison of theoretical and measured .
netization), (maximum susceptibility, ), (associated
with reversible magnetization), (coercive force), and the ad-
ditional parameters in
(1a)
(1b)
(2a)
or (2b)
where
(3)
and is the inverse function of , i.e., .
Thefunction (called “domain-wallsurfacefunction” in
[4]) is critical in shaping the saturation regions of the hysteresis
loop. One choice of is given in [4]
(4)
which is illustrated in Fig. 2 for by the curve labeled
. When is employed in (2b),
as plotted in Fig. 3. The corresponding loop gen-
erated by (1)–(4) saturates rather abruptly as shown in Fig. 1.
Although (4) has been found to be satisfactory for the two
sample materials in [5], a good fit between modeling and mea-
surement has been found to be difficult for the very soft satura-
tioncharacteristic ofpowerMnZn ferrites,asis evidentinFig. 4.
Authorized licensed use limited to: University of Florida. Downloaded on January 22, 2009 at 13:53 from IEEE Xplore. Restrictions apply.

NAKMAHACHALASINT et al.: STATIC HYSTERESIS MODEL 455
Fig. 3. Normalized magnetization vs mean domain-wall position obtained by
(2b).
Fig. 4. Measured and fit major loops at room temperature and 10 kHz for
MN8CX ferrite. The fit major loop is generated by the original Basso & Bertotti
model [4], using the parameters in Table I for .
Two arguments are now given to explain the difficulty in fitting
near saturation. First, is shown in Appendix B and in [5]
tobe proportionalto ofthe saturationloop. Thus,
ought to approach zero very slowly as approaches unity for
powerferrites,for the ofpowerferrites approaches zero
very slowly in the saturation region. This is not seen in Fig. 2.
In fact, the (magnitude of the) slope of increases mono-
tonically as increases from 0 to 1, or as decreases from
1to0.
Secondly, the softness of the static hysteresis loop can be
quantified to be the rate of change of with respect to
, which can be obtained from the upward branch of the major
loop using (A.11)
as or (5)
(6)
Fig. 5. Comparison of theoretical and measured .
Thus, the suitability of for a given magnetic material can
be assessed by comparing with the measured
. This is done in Fig. 5 to evaluate the appro-
priateness of (4) for MN8CX soft ferrite. The need for alternate
forms of is evident.
B. Static Hysteresis Model for Power Ferrites
As suggested by (5), can be obtained from measure-
ments by computing from the major loop data.
These data points are plotted in Fig. 2 along the
suggested in [5], which is (4) with . Much better fit,
however, is achieved by the other two curves in Fig. 2 that cor-
respond to
and (7a)
(7b)
where and for MN8CX ferrite. Note that the
in(7a)was suggested in[7]. The givenby (7b)may
be considered to be the generalized from of the original Basso-
Bertotti’s function in (4). The two parameters ( and ) that
(7b) has more than (7a) are expected to provide more flexibility
in fitting a variety of hysteresis shapes. On the other hand, the
mathematics below will show that the in (7a) is more
efficient numerically.
C. Model Implementation
To recap, the improved domain-wall model for static hys-
teresis of soft ferrites consists of the following equations:
(1)–(3), and (7a) or (7b).
The pseudo-code for the implementation of the preceding
equations is outlined in Algorithm 1, which calls Algorithm 2
to numerically solve for for a given according to (2a)
if a closed-form solution or a lookup table for in term of is
unavailable via (2b). For the given in (7a), Algorithm 2
is not needed since a closed-form solution for is available
(8)
Authorized licensed use limited to: University of Florida. Downloaded on January 22, 2009 at 13:53 from IEEE Xplore. Restrictions apply.

456 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 17, NO. 4, JULY 2002
For the given in (7b), Algorithm 2 is needed during pa-
rameter extraction since a closed-form solution for in term of
is generally unavailable. Once all model parameters have been
extracted, a lookup table can be generated and used to determine
for a given , instead of Algorithm 2, to reduce computation
time.
In steps 3 and 13 of Algorithm 1, is assumed to be negli-
gible relative to , permitting one to write ,
etc. The derivation of step 10 in Algorithm 2 is shown in Ap-
pendix C. The Matlab [8] codes for Algorithms 1 and 2 are listed
in Appendix D. Note that should not be allowed to equal 1
unless the solution algorithm for (2) can handle the singularity
at .
Algorithm 1. Generation of any hysteresis
branch
1)
Data
: model parameters .
2)
Input
: and .
3) Calculate .
4)
Goal
: compute , , and
5)
if
, (initial magnetization
curve)
6) set .
7) Calculate via (1a);
8)
else
(any return branch)
9) Calculate via (1a).
10) Calculate via (1b).
11)
endif
12) Calculate via, e.g., (8), or via
Algorithm 2 if is unavailable.
13) Find .
Algorithm 2. Numerical solution of
(2)
for
by Newton’s method
1)
Data
: Tolerance (tol), Iterative-limit
(iter), and -limit (mlim)
2)
Input
: , , , ,
3) Let . (initial guess).
4) Set and .
5)
while
and ,
6) Set
7)
if
,
8) Set .
9)
endif
10) Calculate
.
11) Update .
12)
endwhile
III. PARAMETER EXTRACTION AND EXPERIMENTAL
VERIFICATION
The model using (7a) for has one integer parameter
and four real parameters ( , , , and ) to be extracted. In
addition to these parameters, (integer) and (real) need to be
extracted if (7b) is used for .
Fig. 6. Experimental setup for – loop measurement.
Fig. 7. Measured and fit major loops at room temperature and 10 kHz for
MN8CX ferrite. The fit major loop is generated by the improved model, using
the extracted parameters in Table I for .
The first step in parameter extraction is the acquisition of the
quasistatic hysteresis loops via voltage and current measure-
ments [1], [9]. In this paper, the hysteresis loops were measured
with a 10 kHz sinusoidal excitation on an MN8CX test toroid at
room temperature. The test core has the following dimensions:
outer diameter 12.70 mm, inner diameter 6.35 mm, height
3.18 mm, mean path length 29.92 mm, and cross-sectional
area 10.1 mm . A primary winding and a secondary winding
were wound bifilar on the core, both having 25 turns of gauge
AWG #28.
LabVIEW [10] was used to automatically acquire hysteresis
loop data by controlling the measuring instruments via IEEE
488 interface as shown in Fig. 6. The test core was demagne-
tized before obtaining each set of the measured data by slowly
reducing the magnitude of the ac excitation voltage from its sat-
uration value to zero [9]. To prevent self-heating, the test core
was excited for only few seconds before each set of data was
measured and stored for post-processing.
The first quadrant of the measured major static hysteresis
loop is shown in Fig. 7. The measured major hysteresis loop
is shown together with several measured minor loops in Fig. 8.
Since describes the reduction of the magnetization near
thesaturation region,itsparametersare extractedfromthe major
Authorized licensed use limited to: University of Florida. Downloaded on January 22, 2009 at 13:53 from IEEE Xplore. Restrictions apply.

NAKMAHACHALASINT et al.: STATIC HYSTERESIS MODEL 457
TABLE I
EXTRACTED PARAMETERS FOR THE HYSTERESIS MODEL FOR MN8CX FERRITE
loop data. Nevertheless, the minor loop data are also included to
check the accuracy of the improved model with respect to minor
loop behavior.
From the versus data for the major hysteresis loop,
and, then, are computed. Appendix B
suggests the following algorithm to estimate the initial values
for the five real parameters , , , , and :
(9)
(10)
(11)
(12)
where is the magnetic flux density at which is
zero.Using theprecedingequations and unityas theinitial guess
for , the initial guesses for MN8CX ferrite are found to be
T, (A/m) , , A/m,
and .
Matlab [8] was then used to extract the model parameters.
Since and are integers, they could not be extracted using
theleast-square-fittingfunction, lsqcurvefit,inastraightforward
manner. Thus, was swept between 1 and 5, and between 1
and 4. For each pair, the five real parameters , , ,
, and were extracted using lsqcurvefit, and the squared
2-norm error (called resnorm in Matlab) recorded. The sets of
parameters with the minimum squared 2-norm errors are listed
in Table I. The numbers of floating-point operations (flops)of
the improved model using is about the
same as the flops of the original model, whereas the flops of
the improved model using is about
two hundred times of the flops of the original model (without
table-lookup). The model using re-
quires more computation because of the integration of (2) via
Algorithm 2. The resnorms of the improved models are at least
twenty times less than the resnorm of the original model, indi-
cating that the improved models provide a better fit to the mea-
sured data.
Fig. 7 compares the measured major loop with the fit major
loop calculated with . The close agree-
ment between theory and experiment justifies the use of the im-
proved models for power MnZn ferrites.
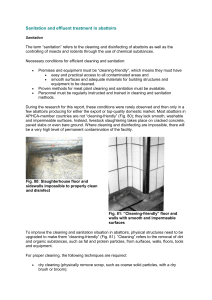
Fig. 8 compares the measured and predicted minor loops
using . Interestingly, the fit between
theory and experiment is still good although the minor loop
data were not used to extract the parameters. The robustness of
Fig. 8. Measured and fit major and minor loops at room temperature and 10
kHz for MN8CX ferrite. The fit – loops are generated by the improved
model, using the extracted parameters in Table I for .
the model can be attributed to the physics base of the model.
The model has also been verified for 3D3 ferrite [11] (resnorm
0.002016) [7] and for ferrite [12] (resnorm 0.006 720).
IV. CONCLUSION
To better characterize the very soft saturation characteristic
of power ferrites, functions with a particular shape have
been proposed for Basso-Bertotti model of static hysteresis so
that the slope of approaches zero asymptotically as the
core saturates. These improved functions have resulted
in good agreement between measured and fit data for the major
and minor loops of three commercial power ferrites.
The model parameters for the other commercial power fer-
rites will be extracted to make this work complete. In addi-
tion,other physical phenomenathatare important topower elec-
tronics, such as temperature, frequency, and core shape, ought to
be incorporated into the model. The complete model should be
implemented in a commercial circuit simulator, offering power
electronic designers another choice for magnetic core models.
APPENDIX A
DERIVATION OF THE MEAN DOMAIN-WALL POSITION
Similar to the classical Preisach model [13], the simplified
Preisach model in [4] employs a collection of noninteracting,
statistically distributed elemental hysteresis loops like those
shown in Fig. 9 to describe the macroscopic hysteresis phe-
nomena. Each elemental hysteresis loop is associated with an
“idealized” one-dimensional domain-wall that is allowed to
move freely when an external magnetic field intensity is
applied. Domain-wall motion could be reversible (no loss) or
irreversible (with loss). The reversible domain-wall motion is
modeled by the zero-width elemental hysteresis loop shown
in Fig. 9(a), and the irreversible domain-wall motion by the
elemental hysteresis loop in Fig. 9(b).
The elemental hysteresis loops are distributed statistically ac-
cording to the Preisach distribution function . In [5],
Authorized licensed use limited to: University of Florida. Downloaded on January 22, 2009 at 13:53 from IEEE Xplore. Restrictions apply.
 6
7
8
6
7
8
1
/
8
100%