PROTEUS : Plate forme pour la Robotique Organisant les Transferts entre Utilisateurs et Scientifiques

Bruno.Patin@anr-proteus.fr
Cyril.Novales@anr-proteus.fr
DES STIC ET DES HOMMES
OBJECTIFS DU PROJET
L’objectif général de PROTEUS est de proposer une
plateforme permettant de faciliter les échanges entre
universitaires et industriels, en mettant à leur disposition des
outils et une méthodologie pour intégration robotique depuis
la modélisation du scénario jusqu'au déploiement sur une
cible robotique.
MÉTHODOLOGIE ET RESULTATS
La plate-forme PROTEUS est composée d’un outillage sur
machine et un portail permettant de développer
une application robotique complète.
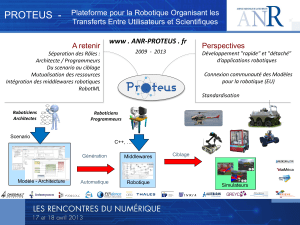
Le développement robotique d’une application a été
clairement délégué à 2 rôles : le roboticien « architecte » et
le roboticien « programmeur ». A partir d’une ontologie sur la
robotique, un langage spécifique RobotML a été créé pour
qu’un architecte puisse décrire formellement le modèle de
son scenario/application robotique, sans se soucier a priori
de la cible finale (Hard et Soft). Une génération automatique
(utilisant accéléo) permet ensuite de projeter ce modèle
dans un des middlewares robotiques de son choix.
Le roboticien programmeur n’a alors plus qu’à intégrer ses
algorithmes (développés ou issus de bibliothèques) dans le
langage/environnement qu’il a l’habitude d’utiliser.
Le ciblage se fait sur le robot physique où sur un des deux
simulateurs utilisés dans le projet. L’exécutable final tourne
avec le middleware, et peut être utilisé indifféremment sur le
robot physique ou sur la simulation, grâce à l’utilisation du
«bus» Ros.
Le changement de robot ou de middleware n’affecte pas la
partie réalisée par l’architecte, et ne remet en cause que la
partie programmation du développement robotique d’une
application. L’utilisation de langages standards (type C++)
limite généralement le travail de reprogrammation aux
couches logiciels proches du matériel. Des bibliothèques de
composants peuvent être ainsi mutualisées sur plusieurs
applications, qu’elles soient proposées en format source ou
en format exécutable.
L’ensemble de ces outils est ouvert et peut se connecter
avec les outils industriels propriétaires (tels que les
middlewares).
CONCLUSION ET PRESPECTIVES
Le DSL RobotML produit par le projet est en discussion pour
devenir l’une des bases d’un futur DSL européen commun.
Des sessions de travail à échelle européenne
(principalement au travers du réseau EU-Robot et sa
thématique sur les modèles) sont régulièrement organisées
dans le but de produire des données pour le PPP2020
(action unissant participation publique et privée au niveau
Européen).
PROTEUS
Plateforme pour la Robotique
Organisant les Transferts Entre
Utilisateurs et Scientifiques
Outillage PROTEUS
Middlewares
Robotique
Middlewares
Robotique
Modèle - Architecture
Modèle - Architecture
Génération
Automatique
Génération
Automatique
Simulateurs
Simulateurs
Robots
Ressac
Wifibot
Caméléon R-Trooper
Vipalab
Scenario
Modules
Algos
C, C++,
Matlab
Roboticiens
Programmeurs
Roboticiens
Architectes
www.anr-proteus.fr
1
/
1
100%