Exercices de vibrations et oscillations en mécanique

Exercices
1
Associations
de
ressorts
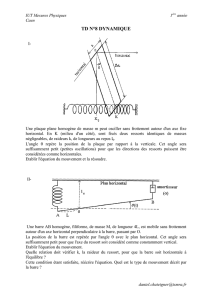
1. On assimile la
double
roue de certains
véhicules
à deux
ressorts semblables
en
parallèle
(figure1.(a)) de
constante
de
raideur
k et de
longueur
à vide l0.
Déterminer
les
caractéristiques
(
k
e
, le0) du ressort
équivalent.
On note M la masse
du
véhicule appuyant
sur
l’ensemble
des deux
r
essorts.
2.
Maintenant,
si l’on s’intéresse
seulement
à une roue et son
amortisseur
(sans tenir
compte
du
système d’amortissement visqueux),
on peut
assimiler l’ensemble
à deux
r
essorts
K
1
,
l01 et K2, l02 en
série(figure
6.1.(b)).
Déterminer
les
caractéristiques
du ressort
équi-
valent. On note M la masse du
véhicule appuyant
sur
l’ensemble
des deux
ressorts
et
A
le point de masse nulle entre les deux
r
essorts.
F
I
G
U
R E1 –
ressorts
en
parallèles
(a),
ressorts
en série
(b)
2 Ressorts et
Poulies
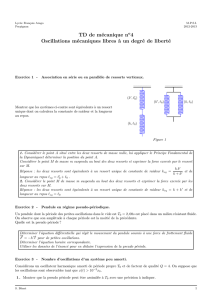
Soit un
système constitué
de deux
ressorts
de
caractéristiques
(
K
1
,
l01) et(K2, l02) et de
deux
poulies
A et B reliés par un fil
inélastique
comme c’est
indiqué
sur la figure2. Sous l’effet
de
la masse M ,
l’extrémité
du fil s’allonge de la
quantité
x0 à
partir
de la
position
à vide
(prise
comme origine des
abscisses).
1.
Exprimer,
x01 et x02 les
déplacements
des centres des
poulies
A et B à
partir
de
leurs
positions
à vide, en fonction deK1, K2, M et g. En
déduire
x0.
On
remplace
ce
système
par un seul ressort
équivalent,
de
raideur
Ke et de
longueur à
vide l0.
Exprimer
Ke en fonction de K1 et K2.
Conclusion.
2. On écarte la masse de sa
position d’équilibre,
établir
l’équation différentielle
du
mouve-
ment (on
prendra
comme origine des abscisses
l’extrémité
fixe du ressort
équivalent).
Chercher
les
solutions
dans les cas
suivants
:
(a) On accroche la masse M au ressort et on la lâche (à t=0) sans vitesse
initiale
59

3. ÉTUDE D’UN OSCILLATEUR
À L’AIDE DE SON PORTRAIT DE
PHASE
.
EXERCICES
UNIVERSITÉ IBN TOFAIL
60
J.DIYADI
F
I
G
U
R E
2
(b) On accroche la masse M au ressort et on la libère à l’instant t
=
t0, en la
poussant
avec une vitesse initiale v0.
3 Étude d’un
oscillateur
à l’aide de son portrait de
phase
On fait l’étude d’un
oscillateur
M de masse M
=
0, 2 kg
astreint
à se
déplacer suivant
l’axe
O
x
de
vecteur unitaire
e~x . Il est
soumis uniquement
aux forces
suivantes
:
– la force de
rappel
d’un ressort de
caractéristiques
(K,
l0).
– une force de
frottement visqueux
:
~
f
v
= −
αx
e
~
x
– une force
constante
F
~C
=
F
C
e~x
1. (a) Établir
l’équation différentielle
du
mouvement
de M et la
mettre
sous la forme
:
x
¨
+
ω0
x
˙
+
ω2
=
ω
2
X0
Q 0
0
où x est
l’allongement
du ressort (par
rapport
à l0). Les
grandeurs
ω0, Q et x0 sont
à
exprimer
en fonction des
données.
(b) Dans le cas d’une
solution pseudo-périodique, chercher l’expression
de x(t)
solution
de
l’équation
ci
dessous,
on
définira
le temps
caractéristique
τ
et la
pseudo-pulsation
Ω que l’on
exprimera
en fonction de ω0 et
Q
.
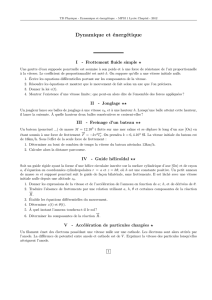
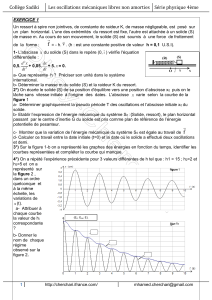
2. Le
portrait
de phase (v(t)
=
x
˙
, x(t)) de
l’oscillateur étudié
est
donné
sur la figure (3 )
On
souhaite pouvoir
en tirer les
valeurs
des
différents paramètres
de
l’oscillateur
.
(a) Quel est le type de
mouvement
?
(b)
Déterminer
la vitesse et
l’élongation
au
début
et à la fin du
mouvement
(c)
Déterminer
la vitesse
maximale atteinte
ainsi que
l’élongation maximale.
(d) On
donne
les
différentes
dates
correspondant
aux
croisements
de la
trajectoire
de
phase avec l’axe des abscisses :
t(s)
0,31
0,65
0,97
1,3
1,62
En
déduire
le
pseudo-période
T et la
pseudo-pulsation
ω
.

UNIVERSITÉ IBN TOFAIL
61
J.DIYADI
4. PROBLÈME
EXERCICES
F
I
G
U
R E 3 –
diagramme
de
phase
(e) On définit le
décrément logarithmique
par
1
δ
=
n
ln
x
(t)
−
x
B
(t)
x(t
+
nT)
−
x
B
(t)
où x(t) sont les
élongations
aux
instants
t et t
+
nT (n entier
naturel)
et xB
l’élonga-
tion finale de M.
Exprimer
δ en fonction de T et
τ
.
En
choisissant
une valeur de n
la
plus
grande
possible pour les
données
dont on
dispose, déterminer
δ puis
τ
.
(f)
Déduire
des
résultats précédents
le facteur de qualité Q et la
pulsation propre
ω
0
.
(g)
Déterminer
la
raideur
du ressort K, le coefficient de
frottement
α et la force FC
sa-
chant que l0
=
1
cm.
4
Problème
F
I
G
U
R E
4
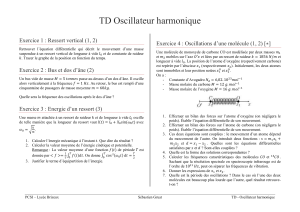
On se
propose d’étudier
le
comportement vibratoire
de
matériaux
en
caoutchouc
(figure
4
(a)). en vue de leur
utilisation
dans la
construction.

UNIVERSITÉ IBN TOFAIL
62
J.DIYADI
4. PROBLÈME (DEVOIR LIBRE)
EXERCICES
Pour leur
modélisation,
nous
assimilons
l’élasticité du
matériau
à celle d’un ressort de
raideur
k et les pertes
énergétiques
par
frottement
à celles ayant lieu dans un
amortisseur
de
coef
ficient
de
frottement
α. Le ressort et
l’amortisseur
ainsi
considérés
sont associés en
parallèle
(figure 4
(b)). On
suppose,
de plus, que le poids du
caoutchouc
est
négligeable devant
les forces
mises
en
jeu.
1. On place une masse m
=
1 t sur un bloc en
caoutchouc
qui se
comprime,
alors,
d’une
distance
d.
Après une
compression supplémentaire,
la masse m relâchée
prend
un
mouvement oscil-
latoire amorti
autour
de sa
position d’équilibre
que l’on repère par la
coordonnée
y.
On
mesure l’intervalle
de temps, ∆t
séparant
le 1er et le 6ème
maximum.
On
trouve
∆t
=
0, 2
s . La
diminution d’amplitude correspondante
est de 60%.
(a) Etablir
l’équation différentielle
du
mouvement
de la masse
m.
(b)
Donner
la forme
générale
de la
solution
y(t).
Comment
varie
l’amplitude
des
oscil-
lations ?
(c)
Déduire
de ce qui
précède
les
valeurs
de k et α.
(d) On refait la même
expérience
avec un autre
caoutchouc.
On
trouve
α
=
4, 5103
k
g.s
−
1
.
Au bout de combien de temps,
∆
t
0
,
obtient-on
la même
diminution d’am-
plitude
que dans l’expérience
précédente
?
(e) Quel est le
matériau
le plus
approprié
pour la
construction
?
2. Un
caoutchouc
avec les
paramètres physiques
k
=
25.106
N
.m
−
1
et α
=
104
k
g.s
−
1
est,
à
présent,
utilisé dans la
construction
d’un pont
d’autoroute,
de masse M
=
12, 5 t. On
as-
simile l’effet du
passage
des
véhicules
le pont à celui d’une force
sinusoïdale d’amplitude
F0
=
103 N et de
fréquence
f
,
appliquée perpendiculairement
au pont (Fig.
5
).
F
I
G
U
R E
5
(a) Ecrire
l’équation
du
mouvement
du pont pour la
coordonnée
y
donnant
son
dépla-
cement par
rapport
à
l’équilibr
e.
(b)
Donner l’expression
du
déplacement,
y(t), en régime
permanent,
en fonction de
la
fréquence.
(c) Quelle est la
fréquence
de
résonance,
f
r
du pont ?
Montrer
qu’on peut l’assimiler
â
sa
fréquence propre
f
0
.
3. En
déduire l’amplitude maximale
à laquelle le pont peut vibrer. Quelle est la phase
cor
-
respondante
?
4. Calculer l’énergie
communiquée
au pont
pendant
un
intervalle
de temps égal à une
pé-
riode,
lorsque
le
passage
des
véhicules
le fait vibrer à la
résonance.
5. Calculer l’énergie
correspondante
qui se
dissipe
dans
l’amortisseur, pendant
le
même
intervalle
de temps.
Conclusion
?

UNIVERSITÉ IBN TOFAIL
63
J.DIYADI
5. ETUDE DE LA RÉSONANCE( TP 2èmeSÉANCE )
EXERCICES
2
5 Etude de la
résonance(
TP
2
ème
séance )
F
I
G
U
R E
6
Une masse m
=
0, 1kg accrochée
l’extrémité
R d’un ressort de
raideur
k
=
20
N
/
m
peut
se
déplacer
sur un axe
horizontale.
On
admettra
que les
frottements
se
réduisent
à une force
~
f
=
−
α
~
v
où
désigne
la vitesse
instantanée
de la masse m. Le coefficient α est
positif.
1.
Oscillations
libres
amorties
L’extrémité E est fixe.
(a) Etablir
l’équation différentielle caractéristique
du
mouvement
du
corps.
(b)
Chercher
les
solutions
x(t) et v(t) selon la valeur du coefficient
d’amortissement.
•
α
=
5
k
g
/
s
(régime
apériodique)
•
α
=
0,
4
k
g
/
s
(régime
pseudo-périodique)
•
α
=
2,
828
k
g
/
s
On
notera
k
α
ω
A.N
0
=
m
;
2λ =
m
À t
=
0 , x
=
x0
=
0, 05cm , v
=
v0
=
0,
25m
/
s
2.
Oscillations for
cées
Le point E effectue des
oscillations sinusoïdales
xe
=
a0 sin Ω
autour
de sa
position
d’équilibr
e
3.
Chercher
les
solutions
de
x
(t)
4.
Déterminer
les
maximums
de x(t) et de
v
(t)
5.
Déterminer
la
bande passante
∆
Ω
6. Le coefficient de
surtension Q
6
Modélisation
d’un
amortisseur
On
considère l’amortisseur
d’un
véhicule
(figure. 7).
Chaque
roue
supporte
un
quart
de
la
masse de la
voiture
assimilé à un point M de masse m
=
500 kg et est reliée à un
amortisseur
dont le ressort a une
constante
de
raideur
k
=
2, 5.104
N
.m
−
1
.
Le point M subit aussi un
frotte-
ment
visqueux
~
f
v
= −
α
~
v
où ~v est la vitesse de M et α
=
5.103
k
g.s
−
1
.
Le
véhicule franchit
à vitesse
constante
un
défaut
de la
chaussée
de
hauteur
h
=
5 cm.
Son
inertie est
suffisante
pour qu’il ne se
soulève
pas
immédiatement
mais
acquiert
une
vitesse
verticale v0
=
0, 5
m.s
−
1. On pose :
λ
=
α
2m
On note Zi la cote du point M avant le
passage
du
défaut.
1. (a) On note Z(t) la cote de M. Établir
l’équation différentielle
pour Z après le
passage
de l’obstacle.
Déterminer
Z(t) en fonction des
données.
On
remarquera
que
λ = Ω
où Ω est la
pseudo-pulsation.
(b) Les
passagers
sont sensibles à
l’accélération
verticale de la
voiture,
calculer sa
valeur
maximale.
On
utilisera
le fait que
λ = Ω
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%