RÉDUCTION CANONIQUE DU PROBLÈME À DEUX CORPS ( ) ( ) ( )

Q Réduction canonique du problème à deux corps (33-208) Page 1 sur 5 JN Beury
M
2
M
1
r
12
u→
G
RÉDUCTION CANONIQUE DU
PROBLÈME À DEUX CORPS
I. ÉLÉMENTS CINÉTIQUES
I.1 Référentiel barycentrique
• On considère deux points matériels M1 et M2 de masse m1 et m2. On note M la masse totale : 12
M
mm=+.
On appelle G leur centre d’inertie
• On considère deux référentiels :
()
,,,Oi jkℜ=
G
G
G
référentiel galiléen et
(
)
*,,,Gi jkℜ= G
G
G
.
*ℜ est en translation par rapport à ℜ, donc */ 0
ω
ℜℜ
=
G
G
et */
*
dd ^
dd
AA
A
tt
ω
ℜℜ
ℜℜ
=+
G
G
G
G.
Rappels de définition :
()
d
d
OM
vM tℜ
=
JJJJG
G = vitesse absolue de M
()
*
d
*d
GM
vM tℜ
=
JJJJG
G = vitesse relative de M
On a vu dans le cours que
(
)()
*G
vM v M v=+
GG G
I.2 Mouvement relatif de 2 par rapport à 1
On pose 12 12
rMM ru
→
==
JJJJJJG
GG
avec 12
u→
G vecteur unitaire dirigé de M1 vers M2.
On cherche à déterminer le mouvement relatif de 2 par rapport à 1, c’est par définition déterminer le vecteur
12 12
rMM ru
→
==
JJJJJJG
GG
.
La vitesse relative de 2 par rapport à 1 est :
()()
(
)
22 12
2/1 2 1 2 1 2 1
*
*
*
ddd
**** ddd
GG
GM GM MM r
vvvvv vv vv ttt
ℜ
ℜ
ℜ
−
=−= + − + = − = = =
J
JJJJG JJJJJG
J
JJJJJG G
GGGGG GG GG
On notera par la suite : 12 12
rMM ru
→
==
J
JJJJJG
GG
et
*
d
d
r
vt
ℜ
=
G
Gla vitesse relative de 2 par rapport à 1
Ne pas confondre vitesse absolue, vitesse relative et vitesse relative de 2 par rapport à 1.
On cherchera par la suite à déterminer 12
rMM=
J
JJJJJG
G. Connaissant 12
rMM=
J
JJJJJG
G
, on pourra remonter facilement 1
GM
J
JJJJG
et
2
GM
JJJJJG
et donc connaître le mouvement de M1 et M2 dans *
ℜ
et donc dans
ℜ
.
I.3 Masse réduite
Par définition du barycentre, on a : 112 2
0mGM mGM+=
JJJJJG JJJJJG
G
112 1212
0mGM mGM m MM++ =
JJJJJG JJJJJG JJJJJJG G
, soit
()
12 1212
0mmGMmMM++ =
J
JJJJG JJJJJJG
G
, d’où
2
112
12
m
GM M M
mm
=− +
JJJJJG JJJJJJG
et 11
21 12
212
mm
GM GM M M
mmm
−
==
+
J
JJJJGJJJJJG JJJJJJG
On définit la masse réduite
µ
telle que : 12
12
mm
mm
µ
=+ ou
12
111
mm
µ
=+
On a donc 1
1
1
GM r
m
µ
=−
JJJJJGG et 2
2
1
GM r
m
µ
=
JJJJJG
G
. Ces deux relations se retrouvent très facilement avec la relation de
Chasles.
I.4 Quantités de mouvement barycentrique
On a vu dans le chapitre « Mécanique d’un système de points matériels » que 12
*0 * *Ppp== +
G
G
G

Q Réduction canonique du problème à deux corps (33-208) Page 2 sur 5 JN Beury
22
2222
*
2
*
dd
** dd
GM m r
pmvm v
tmt
µ
µ
ℜ
ℜ
== = =
JJJJJGG
GG G
. On en déduit que 12
**pp v
µ
=
−=−
G
GG
2*pv
µ
=
G
G
I.5 Moment cinétique barycentrique
Le moment cinétique barycentrique ne dépend pas du point où le calcule. On le calcule très souvent en G :
()
11 2 2 1 2 2 12
*^*^* ^* ^
GGM p GM p GM GM p M M v
σ
µ
=+=−+ =
JJJJJG JJJJJG JJJJJG JJJJJG JJJJJJG
GGG G G
*^
Grv
σ
µ
=
G
GG
I.6 Énergie cinétique barycentrique
() ()()()
()
22
22
12 22 22
11 2 2
12 12
**
11 11111
** *
22 222 2
c
pp
Emv mv v v
mm mm
µ
µ
µ
=+ =+=+ =
2
1
*2
c
Ev
µ
=
II. RÉDUCTION CANONIQUE DU PROBLÈME À DEUX CORPS
II.1 Problème à deux corps – Le référentiel barycentrique est galiléen
On appelle problème à deux corps l’étude d’un système isolé de deux points matériels.
Il n’y a pas de forces extérieures au système.
On applique le théorème du centre d’inertie au système isolé
{
}
12
,
M
M dans le référentiel
()
,,,Oi jkℜ= G
GG
galiléen.
d
d0
dd
G
ext
v
PMR
tt
ℜ
ℜ
===
GG
G
G
G a donc un mouvement rectiligne uniforme.
*ℜ est donc en translation rectiligne uniforme par rapport à
ℜ
.
Le référentiel *ℜ est donc galiléen pour le problème à deux corps
II.2 Équation du mouvement relatif
• On applique le PFD à la masse m2 dans le référentiel *
ℜ
galiléen :
2
2 int sur 2 ext sur 2
*
d*
d
v
mff
tℜ
=+
GGG
12
f→
=G
, soit 2
12
*
*
d* d
dd
pvf
tt
µ
→
ℜ
ℜ
==
G
G
G
, d’où 12
*
d
d
vf
t
µ
→
ℜ
=
G
G
(1)
• On applique le PFD à la masse m1 dans le référentiel *
ℜ
galiléen :
1
1 int sur 1 ext sur 1
*
d*
d
v
mff
tℜ
=+
GGG
21
f→
=G
, soit 1
21 12
*
*
d* d
dd
pvff
tt
µ
→→
ℜ
ℜ
=− = =−
G
G
G
G
d’après le principe des actions
réciproques, d’où 12
*
d
d
vf
t
µ
→
ℜ
=
GG
(2).
On obtient les mêmes équations (1) et (2).
Cela permet de déterminer r
G
, c'est-à-dire le mouvement relatif de 2 par rapport à 1.
Nous allons introduire le mobile réduit qui permet d’avoir une représentation concrète du mouvement relatif de 2 par
rapport à 1.
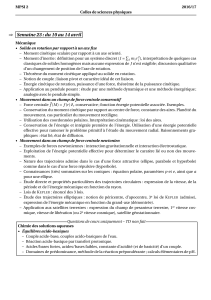
II.3 Mobile réduit (ou mobile équivalent)
On appelle mobile réduit (ou mobile équivalent ou mobile fictif) un point matériel qui serait situé au point M tel que
12
GM M M r==
JJJJG JJJJJJG G et dont la masse serait égale à la masse réduite : 12
12
mm
mm
µ
=+.
On a
*
*
dd
dd
GM r v
tt
ℜ
ℜ
==
JJJJGG
G
= vitesse relative de 2 par rapport à 1
= vitesse du mobile réduit dans *
ℜ
On a vu que 12
*
d
d
vf
t
µ
→
ℜ
=
GG
Le mouvement du mobile réduit peut s’étudier dans *
ℜ
comme celui d’un point matériel de masse égale à la
masse réduite
µ
et auquel serait appliqué la force 12
f
→
G
que le point M1 exerce sur le point M2.

Q Réduction canonique du problème à deux corps (33-208) Page 3 sur 5 JN Beury
z
G
M
2
x
y
M
M
1
M
θ
r
x
y
z
G
r
u
G
u
θ
G
M
2
x
y
M
M
1
G
θ
θ
1
θ
2
La méthode du mobile réduit ramène l’étude du problème à deux corps à celle du problème à un corps. On dit que l’on
a procédé à la réduction canonique du problème à deux corps.
Un intérêt supplémentaire est que *
c
E et *
G
σ
G
calculés précédemment s’identifient à ceux de son mobile réduit :
2
1
*2
c
Ev
µ
== énergie cinétique du mobile réduit dans *
ℜ
et *^
Grv
σ
µ
=
G
GG
= moment cinétique en G du mobile réduit
dans *ℜ.
On a donc une équation différentielle permettant de connaître r
G
. On peut donc en déduire 1
GM
JJJJJG et 2
GM
J
JJJJG et si
nécessaire 1
OM
JJJJJG et 2
OM
JJJJJG
II.4 Conservation du moment cinétique et conséquences
On a vu que le référentiel *ℜ est galiléen.
Le théorème du moment cinétique appliqué au système
{
}
12
M
M+ s’écrit :
*
d* 0
d
G
ext
R
t
σ
ℜ
=
=
G
G
G
On a donc conservation du moment cinétique : *
Gcte
σ
=
J
JG
G
Or *^
Grv
σ
µ
=
GGG
, donc *
Gr
σ
⊥
GG
. On a vu que *
G
GM r
σ
=⊥
J
JJJG
G
G
Le mouvement du mobile réduit est donc le plan passant par G et orthogonal à *
G
σ
G
Remarque : Si *0
G
σ
=
G
G, alors on un mouvement rectiligne.
On choisit l’axe Oz tel que **
Gz
u
σ
σ
=
G
G
On utilise les coordonnées cylindriques pour repérer la position de M.
()
2
*^
Gr r z
ru ru r u r u
θ
σ
µθµθ
=+=
GG GG G
On pose 2
**
Gz zz
uruCu
σσ µθµ
== =
GGGG
La constante des aires vaut 2
Cr
θ
=
Le mobile réduit suit donc la loi des aires.
On a vu que 1
1
1
GM r
m
µ
=−
JJJJJGG et 2
2
1
GM r
m
µ
=
JJJJJG
G
. On a donc : 11
1
1
GM r r
m
µ
θθπ
==
=+
et 22
2
2
GM r r
m
µ
θθ
==
=
On a 2
Cr
θ
=, donc
2
1
11
m
Cr
θ
µ
=
et
2
2
22
m
Cr
θ
µ
=
On a donc :
2
2
11 1
1
2
2
22 2
2
rC C
m
rC C
m
µ
θ
µ
θ
==
==
Les mouvements de M1 et M2 s’effectuent selon la loi des aires avec 12
CC
≠
.
II.5 Cas particulier des forces d’interaction newtonienne
a) Équation différentielle du mouvement du mobile réduit
Le principe fondamental de la dynamique s’écrit pour le mobile réduit dans *
ℜ
: 2r
k
af u
r
µ
==
G
G
G
On utilise la formule de Binet pour l’accélération et on projette suivant r
u
G
: 22
Cu
µ
−
()
2
"uu ku+=
On en déduit l’équation différentielle du mouvement : 2
"k
uu C
µ
−
+= .

Q Réduction canonique du problème à deux corps (33-208) Page 4 sur 5 JN Beury
r
E
p
eff
E
>
m
0
r
min
valeurs de
inaccessibles
r
r
E
p
eff
E
=
m
0
r
min
valeurs de
inaccessibles
r
r
E
p
eff
E
m
< 0
mouvement
b
orné
r
1
r
2
Dans le chapitre « Interaction newtonienne entre deux particules », on a résolu cette équation différentielle. En
utilisant la même méthode, on trouve :
• Pour une force attractive, on obtient 1cos
p
re
θ
=+ avec
2
C
pk
µ
=.
• Pour une force répulsive, on obtient : cos 1
p
re
θ
=
−
avec
2
C
pk
µ
=.
b) Conservation de l’énergie mécanique
b1) Démonstration avec le système constitué des deux particules
On applique le théorème de l’énergie cinétique au système
{
}
12
M
M+ dans le référentiel *ℜ galiléen.
int ext int
d*
c
EWWW
δ
δδ
=+= car le système est isolé.
On considère deux points matériels en interaction newtonienne : 12 12
2
k
fu
r
→→
=
G
G
. On a vu dans le chapitre
précédent que int d
p
WE
δ
=
− avec p
k
Er
=.
On a donc int
d* d
cp
EW E
δ
==−, d’où *
cp
EEcte
+
=
b2) Démonstration simplifiée mais suffisante avec le mobile réduit
Le mobile réduit est soumis à une force qui dérive d’une énergie potentielle : p
k
Er
=
.
On a donc conservation de l’énergie mécanique avec 2
1
*2
c
Ev
µ
=
On a donc conservation de l’énergie mécanique du mobile réduit dans *
ℜ
: **
mcp
EEEcte
=
+= .
On peut donc reprendre tout le cours que l’on a vu sur les forces d’interaction newtonienne à condition de
raisonner dans le référentiel *ℜ sur le mobile réduit de masse
µ
et soumis à une force 12 12
2
k
fu
r
→→
=
G
G
avec
p
k
Er
=.
c) Énergie potentielle effective pour des forces d’interaction newtonienne
L’énergie mécanique dans *ℜ vaut : 2
1
** 2
mcp
k
EEE v
r
µ
=
+= +.
En coordonnées polaires, on a r
OM ru=
JJJJGG et r
vru ru
θ
θ
=+
G
GG
. Soit 2222
vrr
θ
=+
. On remplace
θ
par 2
C
r.
Soit :
()
2
222 2
2
11
** 222
mcp
kCk
EEE rr r
rrr
µ
µθ µ
=+= + += + +
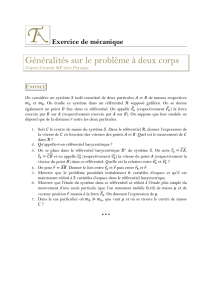
On définit l’énergie potentielle effective :
2
eff 2
2
p
Ck
Err
µ
=
+. Comme 20r>
, on doit avoir eff *
pm
EE<
c1) Force attractive (k < 0)
hyperbole parabole ellipse

Q Réduction canonique du problème à deux corps (33-208) Page 5 sur 5 JN Beury
r
E
p
eff
E
m
> 0
r
min
valeurs de
inaccessibles
r
• Si Em
* > 0, e > 1. On a une branche d’hyperbole.
• Si Em
* = 0, e = 1. La trajectoire est une parabole.
• Si Em
* > 0, e < 1. La trajectoire est une ellipse (e = 0 correspond au cercle).
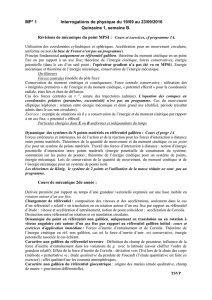
c2) Force répulsive (k > 0)
Em
* > 0, e > 1. On a une branche d’hyperbole.
d) Expressions simplifiées de l’énergie mécanique
On peut redémontrer (voir chapitre « Interaction newtonienne entre deux particules ») les résultats suivants :
()
2
*1
2
m
k
Ee
p
=
−
• Pour une parabole, l’énergie mécanique est nulle : Em = 0.
• Pour une ellipse, l’énergie mécanique est toujours négative, on retient la formule : *2
m
k
Ea
=− .
• Pour une hyperbole, l’énergie mécanique est toujours positive (force répulsive ou force attractive), on
retient par cœur la formule : *2
m
k
Ea
=− .
• ON PEUT RETENIR QUE POUR UNE ELLIPSE OU UNE HYPERBOLE, ON A : *2
m
k
Ea
=± . IL
SUFFIT DE RÉFLÉCHIR AU SIGNE DE L’ÉNERGIE MÉCANIQUE POUR SAVOIR QUEL SIGNE
IL FAUT METTRE.
e) Troisième loi de Kepler
Le mobile réduit suit la loi des aires : 2
d1
d2 2
A
C
r
t
θ
=
=
, d’où dd
2
C
A
t=.
• Sur une période, on a : 2
C
A
ab T
π
==. En élevant au carré, on obtient
2
222 2
4
C
ab T
π
= (1).
• Or
22
bC
pak
µ
== On a donc
2
2
k
C
ba
µ
=.
• Il reste à remplacer dans l’équation (1) : 22 2
1
4
k
aT
a
πµ
=, d’où
22
3
4T
ak
πµ
=.
Remarque : Très souvent, on demande une démonstration simplifiée avec un mouvement circulaire uniforme.
1
/
5
100%