Calcul de la distance par GPS

1
SCALP
Contrôle de la Vitesse moyenne
sur un parcours
--------------
Calcul de la distance
par GPS embarqué
SCALP/Distance – Journée SIR du16/10/2008 – Cete Méd.

2
Calcul de la distance
Odomètre :
Roulette à main dangereuse (et lente),
Cartographie du parcours,
Tour de roue à étalonner avant chaque mesure
Odomètre intégré basé sur le tracé GPS
SCALP
SCALP/Distance – Journée SIR du16/10/2008 – Cete Méd.

3
Lecteur
amont
GPS
GPRS
Wifi
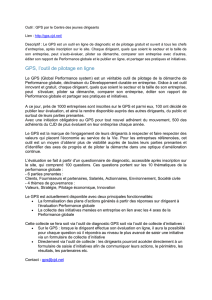
Principe de la mesure de distance
GPS
GPRS
Wifi
Superviseur
embarquéGPS
GPRS
Wifi
Superviseur
70
Véhicule
référent
Lecteur
aval
70
90
90
B
A
SCALP
SCALP/Distance – Journée SIR du16/10/2008 – Cete Méd.

4
SCALP – Mesure de la distance
• Procédure automatique « entre photos » avec tracé GPS
– Possible pour poste fixe
– Trop délicate pour déplaçable
• Procédure par pointage manuel (lecteurs et panneaux),
avec tracé GPS
– Pratique (attention au sens de visée des lecteurs)
• Procédure manuelle avec odomètre externe
– Pas de tracé GPS
Autre ???
SCALP
SCALP/Distance – Journée SIR du16/10/2008 – Cete Méd.

5
Supervision : Etalonnage de l’itinéraire
SCALP
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%