Document

L’emploi des outils
computationnels en vue de
la compréhension du
système neuromusculaire

Deux types de tâches
1. LA MODELISATION dont le but est la
REPRODUCTION d’un certain type d’activité
neuromusculaire à partir d’un ensemble de
composants physiques (par ex., une tentative
de mieux comprendre, à l’aide d’un modèle
informatique, comment la locomotion pourrait
être issue de l’activité collective des neurones
et des muscles)
2. L’ANALYSE ou la description des données en
utilisant des outils statistiques sophistiqués

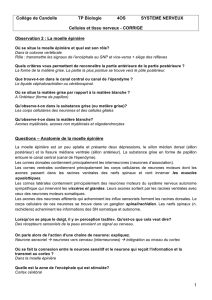
Une équation est un poème en chiffres et symboles.
X = nombre de lapins
Y = nombre de renards
()
1
1bxt
ye
−
−
=
+

Une seule équation exprime tout cela :
1) Lorsqu’il y a peu de lapins, il y a également peu de renards.
2) Quand les lapins deviennent plus nombreux, la population de renards augmente, au
début linéairement. La pente de la courbe est déterminée par un facteur b. Lorsque
la valeur de b est petite, le nombre de renard s’accroissent lentement. Par contre,
lorsque la valeur de best importante, la pente de la courbe est très raide.
3) La population de renards n’augmente pas sans limite. Elle atteint un plateau. La
relation donc entre le nombre de lapins et le nombre de renards est non linéaire.
4) La moitié de la population de renards est atteinte à t
X = nombre de lapins
Y = nombre de renards
()
1
1bxt
ye
−
−
=+

L’ANALYSE ou la description des données en utilisant
des outils statistiques sophistiqués
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
1
/
73
100%




![Découverte d un nouveau centre cérébr[...]](http://s1.studylibfr.com/store/data/001261824_1-044b689d1e2faad91148811640c2eb34-300x300.png)