Réalisation d`un oscillateur contrôlé en tension

Chapitre 9 – Exercice 5
Réalisation d’un oscillateur contrôlé en tension
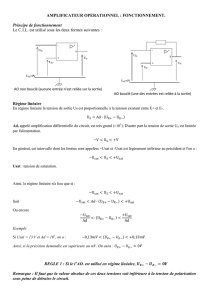
1. Comme il y a adaptation d’impédance des montages à rétroaction, on peut séparer chacun des deux blocs
et reconnaître plusieurs parties :
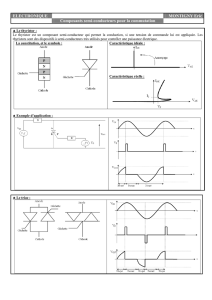
i) un montage bistable non inverseur dont la sortie u2sera en saturation positive ou négative en fonction de
l’entrée u1; la tension différentielle d’entrée, d’expression :
e=R2
R1+R2
u1+R1
R1+R2
u2
permet de déterminer les conditions de basculement. Si initialement u2=Usat,+, la condition de basculement vers
Usat,−sera obtenue lorsque e<0,soit:
u1<−R1
R2
Usat,+d’où u1<−4V
De la même manière, si initalement u2=Usat,−, la sortie u2basculera vers Usat,+pour e>0,soit:
u1>−R1
R2
Usat,−d’où u1>3V
ii) un montage intégrateur inverseur. La condition d’adaptation d’impédance et de non-saturation en courant,
grâce à la valeur de R, permet d’éviter les pertes sur le signal u2lors de la connexion des deux étages. Ce signal
étant stationnaire, la sortie du montage intégrateur est la suivante, en désignant par uc,0la tension initiale du
condensateur :
– pour u2=Usat,+:
us=−Usat,+
RC t+uc,0
– pour u2=Usat,−:
us=−Usat,−
RC t+uc,0
Notons que les niveaux de saturation Usat,+et Usat,−n’étant pas symétriques, les pentes d’intégration
seront différentes.
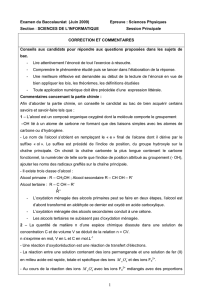
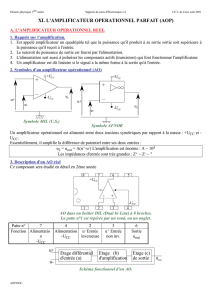
2. a) En fermant K0et K2, on applique le signal usà l’entrée u1du bistable. La pente de l’intégrateur est
déterminée par la valeur de u2, laquelle dépend de la valeur de u1. Ainsi, si on suppose qu’à t=0u2=Usat,−,
le signal de sortie a pour expression :
us(t)=−Usat,−
t
RC +uc,1avec us(t=0)=uc,1=0
d’où une intégration avec une pente de 9 V ·ms−1et une ordonnée à l’origine nulle. Ainsi la tension usaugmente
jusqu’à devenir supérieur à 3 V et déclencher le basculement du bistable vers Usat,+. L’intégrateur va alors intégrer
la nouvelle tension u2,avec uc,0=3V.Latension usdécroît avec une pente de −12 V ·ms−1jusqu’à atteindre
−4 V , ce qui conditionne le basculement du bistable sur u2=Usat,−.
La période Tdu signal triangulaire usest donnée par :
i) la durée t1pour passer de 3 V à −4 V , avec une pente de −12 V ·ms−1, ce qui donne
t1=7/12 ms ≈0,58 ms ,
ii) la durée t2pour passer de −4 V à 3 V , avec une pente de 9 V ·ms−1,soit t2=7/9ms≈0,78 ms .
On en déduit la période des oscillations, T=t1+t2=49/36 ms ≈1,36 ms . Le signal u2est un signal de forme
carrée d’amplitude Usat,+pendant la durée t1et Usat,−pendant la durée t2. Sa période est de 1,36 ms et le
rapport cyclique au niveau haut est ah=t1/Tsoit environ 43%.

56 9. Solutions des exercices
2. b) Dans le cas de seuils de saturation symétriques, ±Usat , la période des oscillations est donnée par la
durée du basculement d’un seuil à l’autre du bistable, où la pente d’intégration est constante et ne fait que changer
de signe : on obtient alors un rapport cyclique de 50%. La demi-période T/2 est donnée par la durée nécessaire
pour passer du seuil R1Usat/R2au seuil −R1Usat/R2avec une pente d’intégration égale à Usat/RC . On en déduit :
T
2=2RC R1
R2
d’où T=4RC R1
R2
On peut corriger l’imperfection de l’AO qui provoque des seuils de saturation non symétriques, en connectant à la
sortie du montage bistable, deux diodes Zener tête-bêche.
3. a) La tension de sortie du multiplieur étant exprimée en volt, le coefficient Kmest homogène à l’inverse
d’une tension et s’exprime donc en V−1.
3. b) Le signal usest multiplié par le facteur Kmuece qui a pour effet de modifier la pente d’intégration. La
période des oscillations devient :
T=4RC R1
KmueR2
Ainsi, la fréquence des oscillations f=1/Test contrôlée par la tension ue. Le montage est un Oscillateur
Contrôlé en Tension (OCT, cf. chapitres 13 et 14). Il aurait été préférable d’intercaler le multiplieur en sortie du
montage bistable afin d’éviter de faire fonctionner ce dernier en régime variable, avec éventuellement des problèmes
de limitation en fréquence.
1
/
2
100%