Induction - MP*1

MP*1- 2014/2015
Induction
1) Freinage par induction :
On considère la chute d’une tige horizontale conductrice, de masse m et de longueur .
La tige, lâchée sans vitesse initiale, glisse sur deux rails verticaux
conducteurs distants de . On suppose qu’il n’y a pas de frottement
entre la tige et les rails. Les rails sont reliés par un dipôle électrique.
On a un champ magnétique
uniforme et orthogonal aux rails et à la
tige. On néglige le flux propre du système rails + barre devant le flux
extérieur. On suppose que la tige est en au temps .
1) Etudier le mouvement de la tige dans les cas où le dipôle est un conducteur
ohmique de résistance , un condensateur de capacité et une bobine d’inductance .
2) Tracer l’allure de la vitesse dans chaque cas, ainsi que le cas où il n’y a pas de
champ magnétique. Montrer que la vitesse est toujours plus faible que dans le cas d’absence
de champ magnétique.
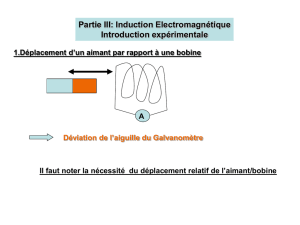
2) Déplacement de deux barreaux :
On considère deux rails parallèles horizontaux et sur lesquels sont disposés deux
barreaux métalliques conducteurs. On maintient l’ensemble dans un champ magnétique
permanent et uniforme, dans un plan perpendiculaire aux plans des rails. Les barreaux ont
même masse , même longueur et même résistance . On néglige les frottements.
Montrer que si l’on déplace l’un des barreaux d’une distance d, lorsque le mouvement
cesse, l’autre barreau s’est déplacé de la même distance d.
3) Deux barres sur deux rails :
On considère deux barres mobiles, de masse négligeable, de longueur , de résistance
sur deux rails parallèles parfaitement conduteurs,
dans un champ magnétique
. Chaque barre est
reliée par une poulie de moment d’inertie
négligeable à une masse respectivement et m’.
Quelles sont les vitesses de chacune des
barres en fonction du temps ?
4) Pendules couplés par induction :
On considère deux penduleset identiques, de masse m, attachés en , évoluant
dans le même plan. Pour chacun d’eux, les tiges sont de masse négligeable, de longueur .
Les deux pendules sont en contact, sans aucun frottement, avec un contour circulaire.
Ils évoluent de part et d’autre du contour de telle sorte qu’ils ne peuvent jamais se
rencontrer. Les pendules et le contour sont conducteurs mais seules les tiges ont une
résistance . Le système est plongé dans un champ magnétique
stationnaire,
perpendiculaire au plan des oscillations.
x
𝐵
𝑔
dipôle
z’
z
x
C’
C
A’
A
𝑔
𝐵
𝑜
m
m’

est initialement dans sa position
d’équilibre. On écarte de sa position d’équilibre
d’un angle
et on le lâche sans vitesse
initiale.
1) Déterminer la loi horaire du mouvement des
pendules. On pourra considérer que le mouvement est
de faibles amplitudes.
2) Tracer et . Commenter.
5) Retournement d’un moment magnétique :
Un moment magnétique
M M uz
.
est placé en un point P de l’axe d’une
spire de rayon , de résistance et de coefficient d’auto-inductance . On note
le flux magnétique du champ du dipôle à travers la spire.
On posera
L
R
On prend
0 o
MM
, et on retourne le dipôle de façon
quasi-instantanée. Après avoir commenté cette dernière
expression, déterminer le courant dans la spire.
6) Moteur linéaire :
Un cadre , carré, conducteur, de côté a est plongé dans un champ magnétique
B B xt e
o o y
cos( )
2
. Il se déplace à la vitesse constante
v v e
o x
, la normale au plan du cadre restant parallèle à
y
e
.
On note la résistance du cadre et son inductance propre.
1) Calculer la force instantanée
subie par .
2) Quelle est sa valeur moyenne? A quelle condition a-t-on un moteur? On mettra en
évidence une valeur critique de .
3) Calculer la puissance moyenne de ce moteur et la puissance dissipée par effet
Joule . Commenter.
Un moteur linéaire est un moteur électrique de type asynchrone dont le « rotor » a été
« déroulé » de sorte qu'au lieu de produire un couple (rotation), il produise une force linéaire
sur sa longueur en installant un champ électromagnétique de déplacement.
Moteur linéaire industriel.
Train canadien se déplaçant grâce à
la bande d'aluminium que l'on voit
entre les voies.
Train Shangai Maglev. Sa vitesse
atteint 431 km/h.
O
𝜃
𝜃
𝐵
𝑔
z
z
𝑀
O
P
y
x
𝐵
𝑣𝑜

7) Pince ampèremétrique :
Un solénoïde torique de rayon moyen est constitué de spires carrés de côté . Il
comprend spires. Sa résistance est .
1) Avec une étude des symétries et l’aide
du théorème d’Ampère, déterminer le champ
magnétique créé par le tore dans tout l’espace
lorsque celui-ci est parcouru par un courant .
2) En déduire le flux du champ
magnétique du tore à travers une spire du tore,
puis à travers toutes les spires du tore.
3) On place sur l’axe du tore un fil
droit parcouru par un courant . Quel est le flux
du champ magnétique créé par le fil à travers
toutes les spires du tore ? Commenter le résultat.
4) On suppose que l’intensité du courant du fil varie et vaut avec
et une fréquence de . Le tore lui n’est relié à aucun générateur. Quelle est
l’intensité du courant induit dans le tore. On posera
Que se passe-t-il
pour .Commenter.
La pince ampèremétrique est constituée d'une pince à
l'intérieur de laquelle on fait passer le conducteur traversé
par le courant dont on souhaite mesurer l'intensité. Son
principal intérêt est l'absence de contact physique et
d'ouverture du circuit pour y insérer un ampèremètre
classique.
8) Freinage d’une spire par induction :
On suspend une spire de centre O, de rayon à un fil . La masse de la spire est ,
son moment d’inertie par rapport à est , sa résistance est et on
néglige son coefficient d’auto-inductance.
On impose un champ magnétique uniforme, horizontal et
stationnaire. On lance la spire avec les conditions initiales
, étant l’angle entre le champ magnétique et la normale à la
spire.
1) Etablir l’équation différentielle du mouvement.
2) Pour quel angle la spire s’arrête-t-elle?
.
3) Calculer l’énergie totale dissipée par effet Joule dans la spire. Conclure.
9) Principe d’un moteur asynchrone
Une spire plane, de surface , de résistance et d’inductance , peut tourner librement
autour de l’axe . Elle est soumise à un champ magnétique dont la norme reste égale à
mais dont la direction tourne au cours du temps:
B B u t
o
( )
où
u t( )
est un vecteur
unitaire, orthogonal à , faisant l’angle
( )t t
o
avec le vecteur
ex
. La spire est animée
d’un mouvement de rotation uniforme à la vitesse angulaire . On pose
( , )
e n t
x
où
n
est le vecteur normal à la spire.
z
b
a
a
i
𝑂
𝐵
O

1) En utilisant deux bobines (supposées infinies) placées de façon perpendiculaire, et
un condensateur, proposer un montage permettant de réaliser le champ magnétique du
problème.
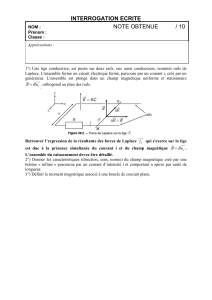
2) Déterminer, en régime permanent, le moment des forces de Laplace s’exerçant sur
la spire puis leur moyenne temporelle. Commenter.
3) Effectuer un bilan énergétique. Le couplage électromécanique est-il parfait?
Interpréter.
4) La rotation de la spire autour de s’effectue en fait avec des frottements dont le
moment selon est
f o
( )
2
où et o sont des constantes positives. Etudier,
suivant les valeurs des différents paramètres du problème, la valeur limite de la vitesse
En 1887, Nikola Tesla dépose un brevet sur le moteur asynchrone, puis en mai de
l'année suivante cinq autres brevets. Du fait de sa simplicité de construction, d'utilisation et
d'entretien, de sa robustesse et son faible prix de revient, le moteur asynchrone est
aujourd'hui très couramment utilisé comme moteur dans une gamme de puissance allant de
quelques centaines de watts à plusieurs milliers de kilowatts. Grâce aux progrès de
l'électronique de puissance, l'alimentation par un onduleur à fréquence variable permet
maintenant de démarrer le moteur convenablement et de la faire fonctionner avec une vitesse
réglable dans une large plage. Il est utilisé pour la motorisation des navires, des voitures
électriques, des machines-outils, des treuils, du TGV, du métro etc…
Indications :
1) Freinage par induction :
Dans les trois cas, orienter le circuit, calculer le flux extérieur et appliquer la loi de Faraday ;
exprimer la force de Laplace en fonction de ; pour le conducteur ohmique,
, pour le condensateur,
; pour la bobine,
.
2) Déplacement de deux barreaux :
Calculer le flux du champ extérieur à travers le circuit et appliquer la loi de Faraday ; puis
appliquer la loi de la quantité de mouvement à chaque barreau ; il faut travailler avec le
barreau qui n’est soumis à aucune force extérieure.
3) Deux barres sur deux rails :
Faire une étude électrique en calculant le flux du champ magnétique à travers le circuit et en
appliquant la loi de Faraday puis appliquer la loi de la quantité de mouvement à chacune des
deux masses ; le fil transmet les tensions, donc la norme de la tension s’identifie à la norme de
la force de Laplace appliquée à chaque tige ; attention aux signes et aux orientations.
4) Pendules couplés par induction :
1) Orienter le circuit et calculer le flux du champ magnétique extérieur ; puis appliquer la loi
de Faraday et en déduire une expression du courant induit ; appliquer la loi du moment
cinétique pour le système {barre + point matériel } en faisant attention au calcul du moment
de la force de Laplace : elle ne s’applique pas en
5) Retournement d’un moment magnétique :
Ecrire l’équation électrique et l’intégrer entre et ; en déduire en
fonction de et , en remarquant que l’intensité du courant étant bornée,
tend
vers zéro ; puis le circuit devient un circuit la valeur initiale du courant étant .
6) Moteur linéaire :
1) Il faut calculer le flux à travers le cadre dans une position (t) du centre d’inertie du cadre,
en déduire la fem induite en négligeant l’auto-induction puis trouver l’expression du courant

induit dans le cadre ; on peut alors calculer les actions de Laplace sur les côtés du cadre ; 2)
on aura un moteur si la puissance de cette force est positif.
7) Pince ampèremétrique :
1) L’étude des symétries montre que
puis appliquer le théorème d’Ampère
en circulant sur un cercle d’axe ; 2) découper chaque spire en surface élémentaire
, puis intégrer ; 3) remarquer que le champ d’un fil infini est très voisin de celui du tore à
l’intérieur de celui-ci, donc inutile de recommencer les calculs ; 4) appliquer la loi de Faraday
en tenant compte du flux extérieur et du flux propre ; résoudre dans le cas du régime établi en
posant ; si , le courant induit esy proportionnel au
courant du fil mais dans un rapport .
8) Freinage d’une spire par induction :
1) Etablir l’équation électrique en calculant le flux du champ magnétique extérieur à travers la
spire, puis en appliquant la loi de Faraday ; appliquer la loi du moment cinétique ; le couple
appliquer à une spire dans un champ magnétique extérieur est
; 2) intégrer
l 'équation différentielle, du début à l’arrêt de la spire ; 3) multiplier l’équation électrique par
et l’équation mécanique par .
9) Principe d’un moteur asynchrone
1) chercher un montage avec deux solénoïdes placés perpendiculairement, chaque solénoïde
produit un champ uniforme de direction l’axe du solénoïde et proportionnel à l’intensité du
courant qui parcourt celui-ci ; il faut chercher à déphaser les courants des deux solénoïdes de
en utilisant dans un circuit une résistance et dans l’autre une résistance et un
condensateur par exemple ; 2) calculer le flux du champ magnétique tournant à travers la
spire, en déduire la fem induite dans la spire puis le courant induit dans la spire ; le moment
des actions de Laplace s’exerçant sur la spire est donné par l’expression
BM
; 3)
exprimer la puissance des actions de Laplace et les pertes par effet Joule ; 4) appliquer la loi
du moment cinétique en rajoutant le moment proposé.
Solutions :
1) Freinage par induction :
Pour le conducteur ohmique
; pour le condensateur
; pour la bobine
.
2) Déplacement de deux barreaux :
La loi de la quantité de mouvement donne pour le barreau qui n’est pas soumis à une force
extérieure :
; en intégrant on a
.
3) Deux barres sur deux rails :
Les trois équations différentielles sont :
R
lB
vvi o
AC )(
; i étant orienté de A vers A’ ;
mg
RlB
vvvm o
ACA 2
2
)(
;
gm
RlB
vvvm o
ACC ')(' 2
2
; soit
gtmmvmmv CA )'('
et
t
gvv cA exp12)(
avec
'
11
2
2
mmRlBo
.
 6
7
6
7
1
/
7
100%