GEO-6333

GEO-6333
Bases technologiques

Qu’est-ce qu’un capteur
numérique?
•Un appareil conçu pour la mesure du flux du
RÉM à distance.
•Pour ce faire, il possède:
- Un système pour viser un objet et collecter
le RÉM provenant de cet objet;
- Un système pour traduire le flux à un signal
électrique mesurable
- Un système pour codifier le signal et
enregistrer les mesures sur medium
informatique ou les télémétrer vers une
station de réception terrestre

Qu’est-ce qu’un capteur numérique?
•Selon l’origine du rayonnement :
- Les capteurs passifs mesurent le
flux du RÉM qui existe dans la
nature indépendamment d’eux
(rayonnement émis par les objets;
rayonnement solaire réfléchi)
- Les capteurs actifs mesurent le
flux du RÉM produit par leur
propre source (laser, source
micro-ondes) qui lui est retourné
après interaction avec les objets.

Qu’est-ce qu’un capteur
numérique?
•Selon la constitution du système de collecte du RÉM:
-Les capteurs optiques: on se sert d’éléments d’optique
(miroirs, lentilles) pour recueillir le RÉM avec des
longueurs d’onde UV proche, visible, infrarouge.
Lorsque le capteur est actif les éléments d’optique
servent aussi à concentrer le RÉM émis dans un
« faisceau » étroit dirigé vers l’objet visé;
-Les capteurs à antennes: on se sert des antennes
avec leurs circuits électriques pour recueillir le RÉM
(micro-ondes). Lorsque le capteur est actif l’antenne
sert aussi à concentrer le RÉM émis dans un
« faisceau » étroit dirigé vers l’objet visé.

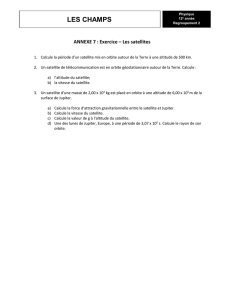
Création DES DONNÉES
numériques: PRINCIPE GÉNÉRAL
Voltage variable dans
le temps Convertisseur
Analogique/Numérique
Y
X
Axe transversal
Axe longitudinal
Unité d'échantillonnage spatial
Trajectoire de vol
Station d'échantillonnage
255
52
108
0
Échantillonnage spatial
du RÉM
Conversion du RÉM en
signal électrique
Échantillonnage
électronique du signal
et conversion à des
comptes numériques
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
1
/
65
100%