Chapitre 4: L`inertie et le mouvement à 2D

Chapitre 4:
L’inertie et le mouvement à 2D

4.1 La première loi de Newton
• En l’absence de forces extérieures, tout corps en mouvement
reste en mouvement rectiligne uniforme et tout corps au repos
reste au repos.
• L’inertie d’un corps est la propriété à résister à tout changement
de vitesse.

4.1 (suite) La première loi de Newton

4.2 Le mouvement dans l’espace
21
( , , )
( , , )
( , , )
( , , )
moy x y z x y z
x y z x y z
y
x
moy
r xi yj zk x y z
r r r xi yj zk x y z
r x y z
v i j k v i v j v k v v v
t t t t
dr dx dy dz
v i j k v i v j v k v v v
dt dt dt dt
v
v
v
a i j
t t t
( , , )
( , , )
zx y z x y zz
y
xzx y z x y z
vk a i a j a k a a a
t
dv
dv dv
dv
a i j k a i a j a k a a a
dt dt dt dt
1
r
2
r
r
x
y
trajectoire
x
y
tangent à la
trajectoire
v
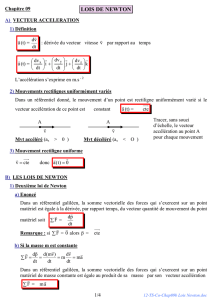
:r
vecteur position ayant l’origine du système de référence et
pour extrémité la position du mobile
:r
vecteur déplacement ayant pour origine la position de
départ et pour extrémité la position d’arrivée du mobile
:
moy
v
vecteur vitesse moyenne
:v
vecteur vitesse instantanée, tangent à la trajectoire (différent de la pente)
:
moy
a
vecteur accélération moyenne
:a
vecteur accélération instantanée (se décompose en accélération radiale et tangentielle)

4.2 (suite) Accélération constante
0
10
2
2
1
02
22
0
0
10
2
2
1
02
22
0
()
2
()
2
x x x
xx
xx
x x x
y y y
yy
yy
y y y
v v a t
x v v t
x v t a t
v v a x
v v a t
y v v t
y v t a t
v v a x
0
10
2
2
1
02
()
v v at
r v v t
r v t at
Forme vectorielle:Forme des composantes:
Il est généralement possible de choisir un système de référence de manière à ce que ax= 0
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%