Chute verticale : TP Physique Terminale S

Chute verticale d’un objet dans un fluide (correction)
Au cours de ce TP, nous nous intéresserons au lâcher (mouvement de chute verticale sans vitesse initiale)
des systèmes mécaniques dans le référentiel terrestre.
N’oublions pas que l’air dans lequel nous évoluons constitue ce qu’on appelle un fluide1…
Donnée : intensité du champ de pesanteur terrestre, g = 9,8 N.kg–1.
Partie A : étude du mouvement de chute d’un objet dans l’air sans vitesse initiale
A.1 – Chute d’une bille
A partir de l’étude du clip vidéo « chute_bille.avi », nous allons chercher à retrouver les résultats obtenus en
cours sur l’accélération, la vitesse et la position de la bille au cours de ce mouvement à l’aide de
modélisations sur la numérisation du mouvement. Le pointage vidéo sera réalisé à l’aide du module de
lecture des séquences AVI de Latis Pro.
Données : masse de la bille m = 6,0 g ; étalon vertical de longueur : 2,00 m ; webcam à 25 images/seconde.
Pointage vidéo
Lancer le module de lecture des séquences AVI de Latis Pro.
Placer l’origine du repère d’étude au pied de l’élève qui tient la règle.
Indiquer l’étalon de longueur.
Procéder à la sélection manuelle des positions de la bille au cours du temps.
Fermer le module de pointage vidéo. Les variables numérisées sont disponibles.
Le mouvement étant vertical, on n’utilisera pas les données en abscisses (« Mouvement X »).
Renommer la variable d’ordonnée « Mouvement Y » en « ordy ».
Etude de la position
Tracer, en fenêtre n°1, « ordy » en fonction de « Temps ».
Modéliser la courbe obtenue et donner forme et paramètres de la modélisation proposée.
Etude de la vitesse et de l’accélération
Dans la feuille de calcul, définir la vitesse « vy » définie comme la dérivée temporelle de la position
« ordy ». On fera l’approximation
1 1
2
ordy n ordy n
vy n
les crochets représentant l’indexation reconnue par Latis Pro.
Peut-on déterminer « vy » à l’instant initial du mouvement ? à l’instant final ?
Faire de même pour l’accélération, « ay », définie comme la dérivée temporelle de la vitesse « vy ».
Tracer, en fenêtre n°2, « vy » en fonction de « Temps ».
Modéliser la courbe obtenue et donner forme et paramètres de la modélisation proposée.
Tracer, en fenêtre n°3, « ay » en fonction de « Temps ».
Modéliser la courbe obtenue et donner forme et paramètres de la modélisation proposée.
Imprimer les courbes n°1, 2 et 3 sur une seule feuille.
Concernant la position, on a montré que
2
1
( )
2
z t g t
en ayant défini un axe vertical orienté vers le bas.
Sous Latis Pro, l’axe vertical est défini vers le haut : on définit la variable verticale « z » dans la feuille de
calculs par « z = –1*Mouvement Y » .
On trace l’évolution de z en fonction du temps.
1 Mais au fait… Qu’est-ce qu’un fluide ??
Terminale S – Physique
TP n°
9
b

2
Concernant la vitesse, dérivée de la position, nous avons montré en cours que ( )
v t g t
.
Dans la feuille de calculs, définissons « v = Deriv(z ; Temps) ». Traçons l’évolution de la vitesse.
Une remarque sur le graphique obtenu : pour estimer la dérivée en un point i, Latis Pro utilise le point
immédiatement antérieur i–1 et le point immédiatement postérieur i+1 en faisant
1 1
1 1
z i z i
v i Temps i Temps i
Cette définition pose un problème pour l’instant initial et l’instant final : comment y utiliser l’instant
antérieur et l’instant postérieur ? Il ne faut donc pas, par conséquent, tenir compte du résultat de la
dérivation aux instants initial et final. Avant de calculer le modèle, on définit sur le graphe les bornes du
calcul en éliminant les deux points incriminés.
instant final
instant initial
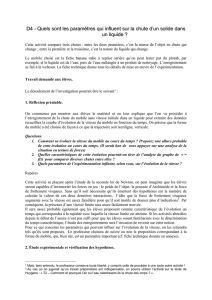
Nous modélisons cette courbe par une « Parabole ».
Le résultat est
z = 4,94818*Temps^2 + 0,01875*Temps + 0,00764
En négligeant les coefficients d’ordre zéro et d’ordre
un, on retrouve bien
1
4,94818
2
g
.

3
Concernant l’accélération, nous avons montré en cours que ( )
a t g
.
Dans la feuille de calculs, définissons « a = Deriv(v ; Temps) ». Traçons l’évolution de l’accélération.
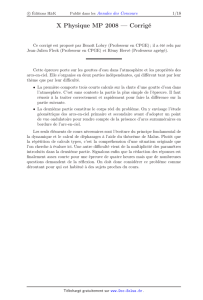
En tenant compte des remarques faites sur le calcul de la vitesse, on modélise la courbe obtenue par une
fonction linéaire, en prenant soin d’annuler le coefficient directeur (le décocher et indiquer 0).
On vérifie alors que
9,38472 g
.
Le résultat de la modélisation
est :
v = 9,96187*Temps
On vérifie alors que
9,96187 g
.
Le résultat de la modélisation est :
a = 0*Temps + 9,38472

4
A.2 – Chute d’une boule de polystyrène
On étudie le clip « parachute_10g.avi ». Après avoir numérisé le mouvement de la balle (masse m = 10 g),
déterminer la courbe représentative de la vitesse de la balle en fonction du temps. On ne tiendra pas compte
du début de l’enregistrement, qui ne correspond pas exactement au début du mouvement. Vous imprimerez
la courbe obtenue.
→ Quelles différences faites-vous ici avec l’étude précédente ? Expliquer.
Nous allons maintenant préciser ce type de mouvement.
Nous allons maintenant préciser ce type de mouvement.
Partie B : étude du mouvement de chute d’un solide dans l’eau sans vitesse initiale
B.1 – Numérisation du mouvement
Nous travaillons sur le clip « chute_vert_bouchon .avi » qui se trouve dans vos répertoires.
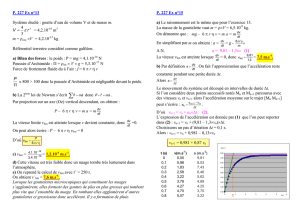
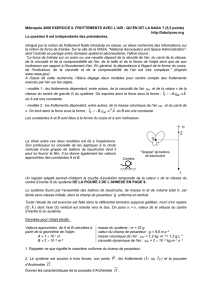
Contrairement à ce qui a été
observé dans le cas de la bille, la
courbe représentative de z(t) ne
peut pas être assimilée à une
parabole ; après une phase de
stagnation (début du mouvement
vers 0,75 s), la position augmente
et sa progression semble devenir
constante (portion de droite au-
delà de 1,5 s).
La vitesse reste nulle le temps que le
mouvement de chute s’amorce, vers
0,75 s. Ensuite, la vitesse semble
croître à la manière d’une
exponentielle comme celles que nous
avons rencontrées en électricité et en
radioactivité. Si on modélise la
courbe expérimentale au-delà de
0,75 s par une exponentielle du type
/
( ) 1 t
f t k e
, on constate que
l’accord à l’expérience est bon. La
vitesse passe donc par un régime
transitoire, de 0,75 à 1,5 s, avant
d’atteindre un régime permanent à
partir de 1,5 s où la vitesse prend une
valeur constante, vlim = 2,2 m/s.

5
Le logiciel Latis Pro permet de numériser cette séquence vidéo. L’enregistrement a été réalisé à l’aide
d’une webcam à raison de 10 images/seconde ; il caractérise la chute d’un objet solide de masse m = 24,5 g
et de volume V = 18,9 mL dans une éprouvette remplie d’eau.
Sélection de l’origine : choisir la dernière position de l’objet (altitude la plus basse)
Sélection de l’étalon : la règle jaune mesure 1,00 m
Sélection manuelle des points (vous choisirez un point du flotteur facile à repérer) ; vous pourrez
lors fermer le module avi de Latis et travailler sur les variables crées automatiquement,
« Mouvement X » et « Mouvement Y ».
Dans le tableur, faire apparaître dans 2 colonnes les valeurs des variables d’espace, « ordy » (coordonnée
verticale) au lieu de « Mouvement Y », et de temps « t » en copiant la variable de « Temps ». Le
mouvement étant vertical, supprimer « Mouvement X ».
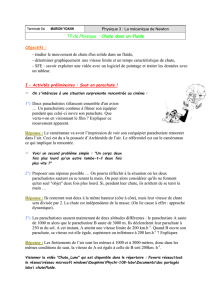
Calculer dans le tableur les valeurs de la vitesse expérimentale « vexp ». Cette grandeur est positive.
A partir du graphe, définir et déterminer la vitesse limite vlim ainsi que la durée caractéristique τ de la chute.
Vous imprimerez la courbe.
B.2 – Etude dynamique théorique
Le système étudié est le flotteur de masse m. On se place dans le référentiel terrestre du laboratoire, supposé
galiléen, en définissant le repère orthonormal (Ox,Oy) de sorte que l’origine O corresponde à la position la
plus basse du flotteur (fin de la chute) et que l’axe (Oy) soit vertical vers le haut.
1. Faire le bilan des forces exercées sur le flotteur.
a. Le poids
P m g mg j
b. La poussée d’Archimède eau flotteur eau flotteur
V g V g j
c. Les forces de frottements 1
f v v j
(laminaire) ou 2
2
f hv v hv j
(turbulent)
2. Appliquer la deuxième loi de Newton au flotteur.
ext
F P f m a
Puisque tous les vecteurs sont portés par l’axe (Oy), on peut écrire
2
eau flotteur
v
mg V g m a
hv
3. En considérant les deux formes possibles de la force de frottement (intensité proportionnelle à la
vitesse f = v ou à son carré f = hv²), donner les équations différentielles (1) et (2) auxquelles obéit
la vitesse v(t) du flotteur. Pour simplifier les écritures, on posera
Graphe vexp = f(t)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
t (s)
v (m /s)
vlim = 0,88 m/s
 6
7
8
6
7
8
1
/
8
100%