4. Approximation par champ de phase

4. Approximation par champ de phase
Approcher un mouvement par courbure moyenne
∂tu= ∆u−< D2u∇u, ∇u >
|∇u|2
par les solutions d’´equations de r´eaction diffusion
∂tuε=ε∆uε+1
εW0(uε)
Moralement, uεest une fonction r´eguli`ere qui varie rapidement sur un ε–voisinage du bord
Γt={∂u = 0}
-Γ–convergence
- Fonctions BV et ensembles de Cacciopoli
- Le th´eor`eme de Modica–Mortola et son extension parabolique

Des exemples en calcul des variation :
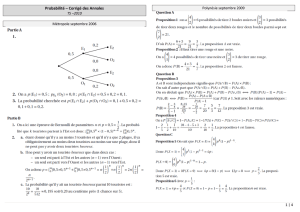
1. Transitions de phase :
On consid`ere un fluide homog`ene isotherme dans un domaine Ω⊂R3
u: Ω −→ [0,1] concentration du fluide. A l’´equilibre minRΩu=VZΩ
W(u)dx
densit´e d’´energie W: (0,∞)−→ Rnon convexe (Van der Waals)
01
Configurations pr´ef´er´ees : interface minimale entre les phases
minRΩu=VZΩ
W(u) + ε2|∇u|2dx →uε≡u(x) + u1(dist(x, Γ)
ε)
Rescaling →´equipartition de l’´energie
minRΩu=VZΩ
1
εW(u) + ε|∇u|2dx

2. Homog´en´eisation de probl`emes variationnels :
Milieu composite de conductivit´e a(x/ε)a Y –p´eriodique
−div(a(x/ε)∇uε(x) = fdans Ω
uε= 0 sur ∂Ω
De mani`ere ´equivalente
min
u=0 sur ∂ΩEε(u), Eε(u) = „ZΩ
a(x/ε)|∇u|2dx −2ZΩ
fu dx«
Probl`emes d´eg´en´er´es : domaines perfor´es
min u= 0 sur ∂Ω„ZΩε
a(x/ε)|∇u|2dx −2ZΩ
fu dx«

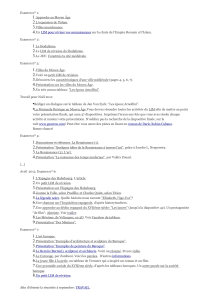
3. R´eduction de dimensions :
Th´erories asymptotiques des structures fines
(plaques, coques, films minces,...)
Ω
ω
Ωε=ω×(0, ε),min
u=gsur ∂ω×(0,ε)Fε(u)
Fε(u) = Zω×(0,1)
f(∂1u, ∂2u, ∂3u/ε)
4. Limites continues de r´eseaux atomiques :
R´eseau `a Npoints reli´es par des potentiels d’interaction ψj, pas du r´eseau λn
Energie (en dimension 1) En(u) = Pn
j=1 Pn−j
i=1 λnψj(ui+j−ui
jλn
)
Pb. variationnel minu+BC En(u)−Pi=0nλnuifi

5. Segmentation d’images, fracture :
Fonctionnelle de Mumford–Shah : combinaison d’´energie volumique et surfacique
E(u, K) = ZΩ\K|∇u|2dx +c1Hn−1(K) + c2ZΩ\K|u−g|2dx
g=fonction donn´ee (image bruit´ee)
Approche Ambrosio–Tortorelli :
Eε(u, v) = ZΩ
v2|∇u|2dx +c/2ZΩ
ε|∇v|2+ (1 −v)2/ε dx
+c2ZΩ\K|u−g|2dx
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%