PCSI. 01/02. Durée 4 heures. Physique. Devoir surveillé N°6.

PCSI. 01/02. Durée 4 heures. Physique. Devoir surveillé N°6.
Ce devoir est un Questionnaire à Choix Multiples (QCM). Pour remplir ce QCM, vous devez utiliser la
feuille intitulée Grille des réponses. Renseigner dès maintenant sur cette feuille votre nom.
Chaque question comporte au plus deux réponses exactes. Lorsque vous jugez que la question comporte
une bonne réponse vous devez mettre une croix dans l’une des cases a, b, c, d.
Chaque bonne réponse est comptée +2, chaque mauvaise réponse est comptée –1.
L’abstention ne rapporte ni ne retire de point. Il est fortement déconseillé de répondre au
hasard.
Toute rature ou surcharge entraîne l’annulation à la question. Pas de réponse au crayon à papier.
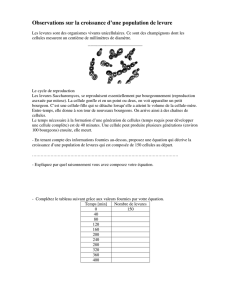
Le circuit de la figure ci-dessous est alimenté entre ses bornes "d'entrée" A et B par un générateur qui
délivre à l'instant t la tension
)(tue
. Cette tension, sinusoïdale, a pour amplitude complexe
e
U
, et pour
pulsation
.
"En sortie", entre les bornes A1 et B1, est placé un dipôle D d'impédance complexe
Z
.
1. Calculer en fonction de L, C,
et
Z
l'impédance complexe
e
Z
du circuit vue entre les bornes A et B
(impédance d'entrée). j est le nombre complexe tel que
1
2j
.
a)
)212( )1(
2
22
CZjCLC LCjLC
Ze
b)
CZjCL CZjCLjLC
Ze
2
2
2
1)]1(1[
c)
)21( )21()1( 2
222
2
2
CZjLCZLCLjZLC
Ze
d)
)1( )12()1(
2
22
CZjLCCLCjLCCZ
Ze
2. En déduire la valeur de
Z
pour laquelle
ZZe
(appelée alors impédance itérative).
a)
)
11
(2
LC
jLZ
b)
22
21
2
CC
L
Z
c)
1222
LC
L
Cj
Z
d)
1
2
22
2
LC
L
Z
3. Compte tenu du résultat de la question précédente, indiquer le domaine des pulsations pour lesquelles
Z
a un comportement résistif, quelle que soit la pulsation. On donne L = 1mH et C = 0, 2
F.
Dans toutes les questions suivantes, on prend comme valeur de
Z
celle qui correspond à l'expression de
la question précédente pour les très hautes fréquences (
). Donner la valeur numérique de la
résistance R ainsi obtenue.
a)
14 .10.5
srad
b)
18 .10
srad
c)
100RZ
d)
2000RZ
4. Examiner le comportement du circuit pour
= 0 et
. Indiquer dans ces conditions si le circuit
constitue un filtre :
a) passe haut b) passe bas c) passe tout d) passe bande

Dans le plan horizontal (xOy) d'un référentiel galiléen R, un mobile modélisé par un point matériel P de
masse m est astreint à se déplacer sur le cercle de centre O et de rayon b. L'équation horaire du
mouvement est :
)1ln()( tbAParcs
où:
• ω est une constante positive,
• A est le point du cercle situé sur le demi-axe positif Ox,
5. Calculer la vitesse v de P à la date t en fonction de la seule variable s .
En déduire la vitesse initiale
)0t(vv0
.
a)
b/s
b
v
12
b)
b/s
ebv
c)
bv 2
0
d)
bv0
6. Calculer en fonction de s et des seuls paramètres b et vo les composantes tangentielles at et normale an
du vecteur accélération de P par rapport à R exprimées dans la base de Frenet.
2 2 2 2
32
11
a) exp( 2 / ) b) c) d) exp( 2 / )
(1 / ) (1 / )
o o o o
t t n n
v v v v
a s b a a a s b
b b s b b s b b
7. Indiquer si le mouvement est :
a) uniformément décéléré b) uniformément accéléré c) accéléré d) décéléré
8. L'hodographe du mouvement de pôle O est l'ensemble des points N tels que :
)/( RPvON
où
)/( RPv
est le vecteur vitesse de P par rapport à R. Soient r et les coordonnées polaires de N.
Déterminer l'équation polaire de l'hodographe ; identifier celui-ci.
a) exp( ( )) b) sin c) spirale logarithmique d) cercle centré sur l'axe Oy
2
oo
r v r v
9. Donner l'expression en fonction de v de
FF
, si
F
est la résultante des forces appliquées à P .
a)
2
2
b
mv
F
b)
b
mv
F2
2
c)
0
/
2
2vv
e
b
mv
F
d)
)
20
2
1ln( v
v
b
mv
F
10. Calculer en fonction de s et des paramètres b et
0
v
le travail W de
F
pendant l'intervalle
de temps [0, t].
a)
)(
2/22
01
1bs
emvW
b)
)1ln(
2
0b
s
mvW
c)
bs
bs
e
e
mvW/2
/2
2
01
1
d)
)
2/2
01(
1bs
emvW
11. En déduire le travail total WT de
F
au cours du mouvement.
a)
2
0
2
1mvWT
b)
2
0
2
1mvWT
c)
T
W
d)
2
0
mvWT

Un moteur
M
équivalent à un résistor de résistance R associé en série avec une bobine de coefficient
d'auto-inductance L est alimenté en courant alternatif sinusoïdal de fréquence 50 Hz. Le moteur
consomme une puissance moyenne
4,4kW
M
P
et son facteur de puissance est égal à 0,6. On mesure
entre ses bornes A et B une tension de valeur efficace
220VU
.
12.Calculer le courant efficace
I
circulant dans la ligne.
a)
I
= 12,5A b)
I
= 27,2 A c)
I
= 42,6 A d)
I
= 33,3 A
13.Calculer R.
a)
4R
b)
8R
c)
2R
d)
12R
14. Calculer L.
a) L = 7 mH b) L = 12 mH c) L = 17 mH d) L = 52 mH
15. Pour relever le facteur de puissance de l'installation, on connecte entre les bornes A et B un
condensateur de capacité C. La tension mesurée aux bornes du moteur a toujours la valeur U = 220 V.
Calculer la plus petite valeur de C pour que le nouveau facteur de puissance soit égal à 1.
a) C = 246 F b) C = 381 F c) C = 192 F d) C = 53 F
Une particule chargée M de masse m et de charge q est lancée à l'origine O d'un repère d'espace
()OxyzR
avec une vitesse initiale
0
v
contenue dans le plan zOx :
0 0 0x x z z
v v e v e
. Cette particule est soumise à
l'action d'un champ magnétique
z
B Be
uniforme et constant, dirigé suivant l'axe Oz et qui règne dans
tout l'espace. On désigne par H la projection orthogonale de M sur le plan xOy.
On considère un second repère d'espace
()Ox y z
R
, de même origine O et de même axe Oz que
R
. Ce
repère est animé d'un mouvement de rotation autour de l'axe Oz avec une vitesse angulaire
z
e
constante.
16. On désigne par
v
la vitesse de la particule dans
R
. Donner l'expression de la force magnétique de
Lorentz
L
F
qui s'exerce sur elle dans
R
.
a)
L
F qB v
b)
L
F qv B
c)
0
2
L
F qv B
d)
0L
F qv B
17. Exprimer la vitesse initiale
0
v
de la particule dans
R
.
a)
00
vv
b)
00
vv
c)
00v
d)
00
vv
18. On étudie le mouvement de la particule dans
R
. Montrer que la force d'inertie d'entraînement
ie
F
peut s'écrire :
a)
2
ie
F m HM
b)
2
ie
F m HM
c)
2
ie
F m OH
d)
2
ie
F m OH

19. Un pendule simple est constitué d'un point matériel M de masse m = 10 g, suspendu à un point A situé
sur l'axe Ox d'un repère galiléen R(Oxyz) par un fil sans masse de longueur l.
On note
l'angle que fait le fil que l'on suppose constamment tendu avec la verticale Oy de R(Oxyz).
Initialement, le point A reste fixe et confondu avec l'origine O du repère R.
Calculer la longueur l du fil pour que la période des petits mouvements du pendule soit To = 1 s. On
prendra pour norme de l'accélération de la pesanteur la valeur g = 9, 81 m.s-2 .
a) l = 0, 196 m b) l = 0, 248 m c) l = 0, 333 m d) l = 1, 225 m
20. Le point de suspension A est maintenant animé d'un mouvement de translation rectiligne sinusoïdal
suivant l'axe Ox de R(Oxyz), d'amplitude xo et de pulsation
. On note xA =xosin
t l'abscisse instantanée
de A. On désigne par RA(A, x',y',z'), le repère d'origine A dont les axes Ax', Ay' et Az' restent
respectivement parallèles aux axes Ox, Oy et Oz de R(Oxyz).
Calculer le moment MA(Fie) par rapport au point A de la force d'inertie d'entraînement qui s'exerce sur M
dans RA.
21. Calculer le moment MA (Fic) par rapport au point A de la force d'inertie de Coriolis qui s'exerce sur M
dans RA.
22. En appliquant le théorème du moment cinétique à la masse m au point A dans RA et en se limitant à
l'étude des mouvements de faibles amplitudes, l'équation différentielle à laquelle obéit l'angle
s'écrit :
23. A l'instant t = 0,
(0) = 0 et
0
0
t
dt
d
. On pose
o= 2
/To. Montrer que la valeur instantanée de
l'angle
est donnée par la relation :

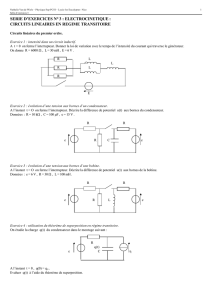
Le circuit suivant est soumis à un échelon de courant délivré par un générateur de courant idéal :
24. L'équation différentielle vérifié par le courant i est :
d d '
a) b)
dd
d ' ' d ' '
c) d)
dd
i R R i R R R
i Io i Io
t L L t L L
i R R R i R R R R
i Io i Io
t L L t L L
25. L'intensité i vérifie l'équation suivante :
''
a) exp( ) b) (1 exp( ))
''
' ' '
c) (1 exp( )) d) (1 exp( ))
''
R R R R R R
i Io t i Io t
R R L R R L
R R R R R R
i Io t i Io t
R R L R R L
26. L'intensité i' a pour expression :
' ' '
a) ' (1- exp( )) b) ' (1 exp( ))
' ' '
' ' '
c) ' (1 exp( )) d) ' (1 exp( ))
'
R R R R R R R R
i Io t i Io t
R R R L R R R L
R R R R
i Io t i Io t
L R R L
27.La tension u s'écrit :
2
' ' ' ' ' '
a) (1- exp( )) b) (1 exp( ))
''
' ' '
c) ' (1 exp( )) d) (1 exp( ))
'
RR R R R R R R R R
u Io t u Io t
R R L R R R L
R R R R
u R Io t u Io t
L R R L
28. Sous l'action d'une force centrale constamment dirigée vers un point fixe O, une particule de masse m
décrit une spirale dont l'équation en coordonnées polaires est r = roexp(-a ) où a est une constante
positive. Elle est sollicité par une force F(r) de valeur :
32
a) ( ) b) ( ) c) ( ) d) ( )
Cte Cte Cte
F r F r F r F r Cte
r r r
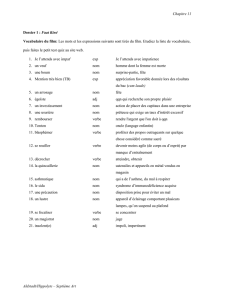
29. On considère le circuit suivant :
Toutes les impédances sont complexes.L'impédance Z équivalente de ce réseau vue des points A et B est :
( 2 ) ( )
a) b)
( 2 ) ( ) ( 2 ) ( )
c) d)
S C P C C P S P
C S P C S P
S S P C S P P C S C C P
C S P C S P
Z Z Z Z Z Z Z Z
ZZ
Z Z Z Z Z Z
Z Z Z Z Z Z Z Z Z Z Z Z
ZZ
Z Z Z Z Z Z
0
00 tCteIotI ttI pour )( pour )(
 6
7
8
9
6
7
8
9
1
/
9
100%