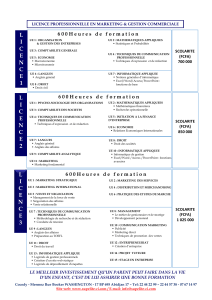
2 - page perso

Terminale STI génie mécanique PHYSIQUE APPLIQUEE 1
Ch. Ekstein
Programme de physique appliquée
A. Energétique, optique
A.1. Energétique
A.1.1. Les différentes formes de l'énergie
A.1.2. Transformations de l'énergie et conservation globale
A.2. Optique géométrique
A.2.0. Réflexion, réfraction, indice de réfraction. Dispersion de la lumière.
B. Electricité
B.0. Rappels sur le régime sinusoïdal
B.1. Systèmes triphasés équilibrés
B.1.1. Définitions : tensions simples, tensions composées.
B.1.2. Couplages en étoile et en triangle.
B.1.3. Puissances.
B.2. Electromagnétisme et magnétisme
B.2.0. Flux du champ magnétique à travers une spire
B.2.1. Vecteur excitation magnétique H
B.2.2. Courbes d'aimantation. Hystérésis. Champ magnétique rémanent,
excitation coercitive.
B.3. Etude de quelques convertisseurs
B.3.1. Convertisseurs statiques.
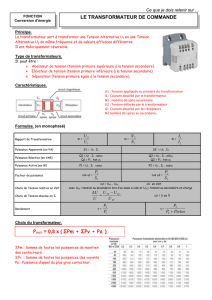
B.3.1.1. Le transformateur. Modèle du transformateur parfait ; rendement du transformateur réel, rôle des
transformateurs dans le transport et la distribution de l'énergie électrique.
B.3.1.2. Redressement, redressement commandé.
Notions sur le redressement double alternance des tensions et courants alternatifs : filtrage de la tension ou lissage du
courant. B.3.1.3. Hacheur série.
B.3.1.4. Onduleur autonome.
B.3.2. Convertisseurs tournants.
B.3.2.1. Moteur à courant continu : principe, réversibilité. Moteur à excitation indépendante propriétés
essentielles ; caractéristiques électromécanique et mécanique; réglage de la vitesse, inversion du sens de rotation.
B.3.2.2. Champs tournants: production par un système triphasé de courants.
B.3.2.3. Alternateur : Organisation simplifiée; caractéristique U(l) d'un alternateur dans le cas d'une charge
résistive. Puissances mises en jeu.
B.3.2.4. Moteur asynchrone. Principe du fonctionnement ; vitesse de synchronisme ; glissement ; bilan des
puissances. Caractéristique mécanique. Réglage de la vitesse par association avec un onduleur autonome.
C. Chimie
C.1. Oxydoréduction
C.1.1. Oxydation et réduction par voie sèche; application à la sidérurgie.
C.1.2. Application de l'oxydoréduction à la corrosion des métaux.

Terminale STI génie mécanique PHYSIQUE APPLIQUEE 2
Ch. Ekstein
A. Energétique, optique
A.1. Energétique.
A.1.1. Les différentes formes de l'énergie.
A.1.2. Transformations de l'énergie et conservation globale.
Formulaire :
En translation
En rotation
Energie mécanique (travail) en J
BAFFWAB
.)(
W = T.
Puissance en W
vFP
.
P = T.
Travail d'une force :
cos...)( ABFBAFFWAB
(en J avec F en N et AB en m)
Application à la pesanteur : W = P.h = m.g.h pour une chute de hauteur h (g 9,8 m.s-2)
Energie cinétique de translation : W = 1/2 m.v² où la vitesse v en m/s
Energie mécanique de rotation : W = T.
le moment T en N.m et l'angle
en rad.
Puissance moyenne :
)sec( )(
)( ondesentjoulesenW
wattsenP
ou
)( )(
)( heuresentkWhenW
kWenP
En régime permanent - de translation :
vFP
.
la vitesse v en m/s
- de rotation : P = T.
(en rad/s) = 2n (avec n en tr/s)
Rendement d'un convertisseur :
)( )(absorbéeP restituéeP
a
u
toujours 100 %

Terminale STI génie mécanique PHYSIQUE APPLIQUEE 3
Ch. Ekstein
Exercices :
1) Le train à grande vitesse Paris Sud-Est (TGV-PSE) est équipé de 12 moteurs à courant continu à excitation en
série. Au point de fonctionnement nominal, chaque moteur absorbe la puissance Pa = 528 kW et développe
sur l'arbre un couple utile de moment Tu = 1 561 N.m à la fréquence de rotation nominale
n' = 3000 tr/min.
a) Calculer la puissance utile Pu fournie par un moteur.
b) Quel est le rendement d'un moteur ?
c) A 3 000 tr/min, la vitesse du train est v = 260 km/h. Sachant que la masse totale du train (à pleine
charge) est de 416 tonnes, calculer l'énergie cinétique Ec du train dans ces conditions de
fonctionnement.
2) Le poids moteur d'une horloge campagnarde a une masse m = 5 kg : on la remonte d'une hauteur h = 1,80 m
tous les 4 jours.
a) Quelle est la puissance moyenne P nécessaire pour le fonctionnement du moteur ?
b) Quelle puissance doit posséder l'opérateur qui remonte la masse si cette action est effectuée en 10 s ?
3) Une vis de presse à main est mise en mouvement en exerçant le couple aux extrémités d'un levier AB solidaire
de la vis. Les directions de
1
F
et de
2
F
sont constamment orthogonale au segment AB.
On donne F1 = F2 = 20 N et AB = 30 cm.
1
F
B
Calculer : A
a) le moment du couple exercé par les 2 forces, vis
b) le travail W fourni après une rotation de 5 tours
c) la puissance correspondante si ce travail est effectué en 8 s.
2
F
4) Une automobile de masse 1 t monte une pente de 10 % (sin = 0,1) pendant 1 km.
a) Quel est le travail résistant de son poids ?
b) Quelle est la puissance du moteur pour qu'elle roule à 60 km/h ? (on néglige les frottements)
v

Terminale STI génie mécanique PHYSIQUE APPLIQUEE 4
Ch. Ekstein
A.2. Optique géométrique
A.2.0. Réflexion, réfraction, dispersion de la lumière
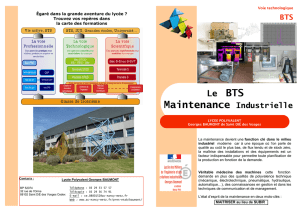
Lois de Descartes A
1) Réflexion : angle d'incidence i = angle de réflexion r (1) i r
A : objet réel ; A' : image virtuelle
A' symétrique de A / plan du miroir
A'
2) Réfraction : sin i = n sin r (2) i
milieu 1
i : angle d'incidence
r : angle de réfraction milieu 2
n : indice de réfraction du milieu 2 par rapport au milieu 1
r
Réflexion totale : si n est inférieur à 1 (exemple eau /air : n = 0,75) r ne peut pas être > 90 ° . On a
donc
sin i < n soit i < sin-1 n sinon le milieu 1 se comporte alors comme un miroir (c’est la réflexion totale).
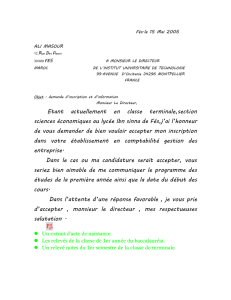
Lentilles F foyer objet, F' foyer image
O centre optique, F'OF axe optique
Vergence :
f
V1
en dioptries si distance focale f = OF' en m
:
Lentilles convergentes (V > 0)
B1
Objet : A1B1
A1 F O F' A'1
image réelle B'1
Lentilles divergentes (V < 0)
B2
B'2
A2 F' A'2 O F
image virtuelle

Terminale STI génie mécanique PHYSIQUE APPLIQUEE 5
Ch. Ekstein
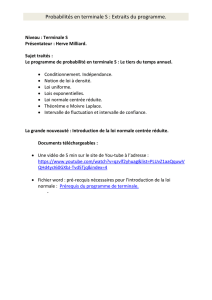
Exercice 1 Construire le faisceau réfléchi successivement par les miroirs M1 et M2 correspondant au
faisceau incident issu de la source S (principe d'un périscope)
M1
I1
S
I'1
M2
Exercice 2
Le milieu 1 est l’air. Le milieu 2 est du plexiglas.
1) Un rayon lumineux passe de l’air dans le plexiglas.
L’angle d’incidence est de 50 °, l’angle de réfraction de 30,7 °.
Déterminer l’indice de réfraction n2/1.
2) Quelle est la plus grande valeur possible pour l’angle de réfraction ?
3) Un rayon incident dans le plexiglas frappe la surface de séparation avec un angle d’incidence égal
à 30 °. Sachant que n1/2 est l’inverse de n2/1 construire le rayon émergeant dans l’air.
4) Que se passe-t-il si le rayon incident dans le plexiglas est tel que i = 60 ° ?
(1)
(2)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%