Chapitre_3

23
Chapitre 3
Processus aléatoires
1. Introduction
Le mot « signal » désigne l’évolution temporelle d’une grandeur physique
mesurable (courant, tension, force, température, pression, etc.). Ces signaux
physiques sont modélisés par des fonctions mathématiques
x
dépendant d’une
variable représentant le temps
t
. En pratique un signal est issu d’une mesure par
un capteur. Un signal est dit déterministe si son évolution peut être prédite en
utilisant un modèle mathématique. C’est le cas de la tension électrique aux
bornes d’une alimentation qui peut s’écrire
)2cos()( 0tfAtx
. Si
A
et f0 sont
connus, on peut déterminer la valeur de l’amplitude à n’importe quel instant. Il
n’en est plus de même pour un signal tel que celui observé à la sortie d’un
microphone. Il semble que tout effort pour écrire l’équation d’un tel signal, même
avec un très grand nombre de paramètres, soit voué à l’échec. Par contre on
imagine assez bien que, faute de pouvoir donner la valeur du signal à un instant t,
il soit possible de préciser une distribution de valeurs possibles. D’où l’idée
d’utiliser des variables aléatoires pour décrire le phénomène à tout instant [4,5].
2. Définition
Un processus aléatoire (ou stochastique) est une famille de fonction
)(tX
,
réelles ou complexes, définies dans un espace de probabilité, c’est-à-dire
dépendant de deux variables, l’une est le temps
t
, l’autre est la variable
définissant le hasard. Selon que les variables sont continues ou discrètes, on
parle de processus aléatoires continus ou discrets.
2.1. Signaux aléatoires
Pour une réalisation
i
donnée, le processus aléatoire
),(
tX
se réduit à une
fonction
),( i
tx
que l’on notera simplement
)(txi
, c’est un signal aléatoire. Par
convention, un signal aléatoire
)(tx
est considéré comme un signal à puissance
moyenne finie, dont la puissance est calculée par l’équation :
2/
2/
2
)(
1
lim T
T
T
xdttx
T
P
(1.1)
A partir de
)(tx
, on peut définir la moyenne temporelle du signal :
2/
2/
)(
1
lim T
T
Tdttx
T
x
(1.2)

24
2.2. Variables aléatoires
A chaque instant
i
t
, le processus aléatoire
),(
tX
se réduit à une variable
aléatoire
),(
i
tX
notée
)( i
tX
ou simplement
i
X
, dont le comportement nécessite la
connaissance de sa fonction de répartition :
)(),()( xXprobtxFxF iiXXi
(1.3)
ou de sa densité de probabilité :
dx
xdF
txpxp i
i
X
iXX )(
),()(
(1.4)
Pour évaluer la moyenne
X
de la variable aléatoire
X
, on peut calculer la moyenne
des
N
épreuves :
N
nn
NX
N
X1
1
lim
(1.5)
Si l’on connait la loi de probabilité de
X
, l’espérance mathématique est donnée
par :
dxxxpXE X)(
(1.6)
2.3. Vecteurs aléatoires
Soient les variables aléatoires
k
XXX ,,, 21
associes aux instants
k
ttt ,,, 21
. Ces
variables aléatoires forment un vecteur aléatoire
T
k
XXX ,,, 21
. Ce vecteur est
caractérisé par sa fonction de répartition :
),,,(),,,( 221121 kkkX xXxXxXprobxxxF
(1.7)
3. Processus aléatoire
Un processus aléatoire
),(
tX
est une famille de fonctions
)(tX
, réelles ou
complexes, définies dans un espace de probabilité, c’est-à-dire dépendant de
deux variables, l’une est le temps
t
, l’autre est la variable
définissant le hasard
[4,5].

25
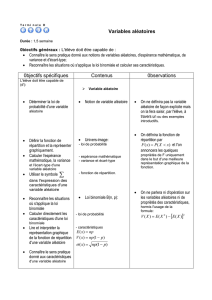
Figure.1 Processus aléatoire
-
),(
tX
est une variable aléatoire si
t
est fixe,
est variable.
-
),(
tX
est un signal aléatoire (réalisation) si
t
est variable,
est fixe.
-
),(
tX
est un nombre si
t
est fixe,
est fixe.
-
),(
tX
est processus aléatoire si
t
est variable,
est variable.
Selon que les variables
t
et
sont continues ou discrètes, on parle de processus
aléatoires continus ou discrets comme suit :
- si
t
et
sont continues alors
),(
tX
est un processus aléatoire continu
(continuous random process).
- si
t
est continu et
est discret alors
),(
tX
est un processus aléatoire
discret (discrete random process).
- si
t
est discret et
est continu alors
),(
tX
est une séquence aléatoire
continue (continuous random sequence)
- si
t
est discret et
est discret alors
),(
tX
est une séquence aléatoire
discrète (discrete random sequence).
3.1. Statistiques d’un processus aléatoire
L’équation (1.7) caractérise les statiques d’ordre
k
du processus aléatoire
),(
tX
. De façon générale, on s’intéresse à des statistiques d’ordre 1 pour une
variable, et les statistiques d’ordre 2 pour un vecteur de deux variables
aléatoires.
3.1.1. Statistiques d’ordre 1
Soit
i
X
une variable aléatoire du processus aléatoire
),(
tX
à l’instant
i
t
. Sa
fonction de répartition est notée
)(),( xXprobtxF iiX
et sa densité de
probabilité
dxxdFtxp i
XiX /)(),(
.
On peut définir les différents moments statistiques :
Moment d’ordre 1 (moyenne) :

26
dxxxpXE i
Xi )(
(1.8)
Moment d’ordre
n
dxxpxXE i
X
nn
i)(
(1.9)
Moment centré de degré ou d’ordre
n
dxxpXExXEXE i
X
n
i
n
ii )(])[(])[(
(1.10)
Moment centré d’ordre 2
Ce moment s’appelle la variance. Elle est définie comme :
dxxpXExXEXE i
Xiii )(])[(])[( 222
(1.11)
La variance peut être aussi s’exprimée sous la forme :
222 ][ i
Xi mXE
(1.12)
La variance est une mesure de la dispersion de la variable aléatoire autour de
sa moyenne. Sa racine carrée est appelée écart-type (standard déviation).
3.1.2. Statistiques d’ordre 2
Soient les deux variables aléatoires
)( 11 tXX
,
)( 22 tXX
et la fonction de
répartition :
),(),( 221121 xXxXprobxxFX
(1.13)
et la densité de probabilité :
21
21
2
21 ),(
),( xx xxF
xxp X
X
(1.14)
On peut alors définir les différents moments du vecteur aléatoire
T
XX ],[ 21
par
][ 21 nm XXE
, en particulier, pour comparer les variables aléatoires, on
utilise la fonction d’autocorrélation statistique :
2121212121 ),(][),( dxdxxxpxxXXEttr Xx
(1.15)

27
Et la fonction d’autocovariance, qui n’est autre que la fonction d’autocorrélation
des variables centrées :
2121212121 ),())(()])([(),( 2121 dxdxxxpxxmXmXEttc XXXXXx
(1.16)
En développant cette expression, on peut aboutir à :
21
),(),( 2121 XXxx mmttrttc
(1.17)
Remarque : Si
21 tt
, on aura .
3.2. Stationnarité et ergodicité
3.2.1. Processus stationnaire au sens strict
Un processus aléatoire est dit stationnaire au sens strict, si toutes ses
propriétés statistiques sont invariantes à un changement d’origine du temps.
3.2.2. Processus stationnaire au sens large
Un processus aléatoire est dit stationnaire au sens large, si toutes ses
propriétés statistiques d’ordre 1 et 2 sont invariantes à un changement d’origine
du temps.
Pour un processus aléatoire stationnaire au sens strict, on a :
jixpxpxp XXX ji ,),()()(
(1.18)
Pour un processus aléatoire stationnaire au sens large, on a :
Xi XEXE
(1.19)
222 Xi XEXE
(1.20)
),(),( 21
xx rttr
),(),( 21
xx cttc
12 tt
(1.21)
3.2.3. Processus ergodique
Un processus aléatoire est dit ergodique (ergodic) si les valeurs moyennes
statistiques (d’ensemble sur ζ) sont égales aux valeurs moyennes temporelles
(sur une seule réalisation). La conséquence de cette hypothèse est très
importante en pratique. Elle permet de remplacer les calculs de moments
statistiques (qui supposent connues les densités de probabilité ou les fonctions
de répartition) par les moyennes temporelles sur une seule réalisation
(observation). En pratique, faire une estimation de la moyenne temporelle sur une
fenêtre de taille infinie est impossible. Il faut se contenter d’une approximation
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%