TP Ondes et Vibrations L2 : Oscillations, Résonance, Ondes Stationnaires
Telechargé par
Asma Lahmar

1
UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE MOHAMED BOUDIAF
FACULTE DE PHYSIQUE
TRAVAUX PRATIQUES ONDES ET VIBRATIONS
L2-LMD-SM
ANNNEE 2021-2022

2
Préface
Le présent polycopié de travaux pratiques ondes et vibrations a été élaboré par les
enseignants de la faculté de physique et s’adresse aux étudiants de deuxième année du
LMD Sciences de matériaux SM de la faculté de physique de l’université des Sciences et de
Technologies d’Oran USTO-MB.
Le programme des travaux pratiques proposé ici concerne essentiellement les chapitres
oscillation-vibration et s’intéresse à la compréhension des phénomènes de vibrations et
propagation des ondes dans les systèmes mécaniques et électriques.
1-SOMMAIRE
TP1 – OSCILLATEUR MECANIQUE AMORTI
TP2 – CIRCUIT RLC ATTAQUE PAR UN SIGNAL CARRE
TP3 – OSCILLATION MECANIQUE EN REGIME FORCE(LIBRE ET AMORTI) : ETUDE DE LA RESONANCE
TP4 – CIRCUIT OSCILLANT RLC SERIE EN REGIME SINUSOIDAL FORCE : ETUDE DE LA RESONANCE
TP5 – SYSTEME OSCILLANT A DEUX DEGRES DE LIBERTE : PENDULES COUPLES ,BATTEMENTS
TP6 – ETUDE DES ONDES STATIONNAIRES :LES CORDES VIBRANTES
TP7 – PROPAGATION DES ONDES DANS LES SYSTEMES MECANIQUES
2-ANNEXES

3
TP N01
OSCILLATEUR MECANIQUE AMORTI
RAPPEL THEORIQUE :
Si un oscillateur harmonique est soumis à une force de frottement proportionnelle à la vitesse v
v.KFf
K:coefficient de frottement visqueux, son mouvement dans le cas d’un amortissement faible est décrit par
l’expression : X(t) = A0 e-bt.sin(t +)
t est le temps et A (t)= A0 e-btest l’amplitude amortie ,b = K / 2 m est le coefficient d’amortissement
= 2 / T est la pseudo pulsation qui vérifie la relation 2 = 02 – b2
T est la pseudo période du mouvement ,A0 et sont des constantes dépendant des conditions initiales
0= 2/ T0 et T0 représentent , respectivement, la pulsation propre et la période propre du système sans
frottement. On définit le décrément logarithmique d’amortissement par = bT ,le facteur de qualité du
système oscillant amorti est donné par :
b2
Qo
Manipulation :( voirannexe 1)
Vérifier que la masse de l’oscillateur est plongée dans l’eau
Vérifier que le réglage de la table traçante est à la position 10 mV/cm et le commutateur VAR-CAL
correspond a la position CAL
Vérifier que le réglage de la base de temps de la table traçante est à la position (0.5 s /cm)
Tirer verticalement sur le fil du système oscillant puis le lâcher Mettre le commutateur REP-1X-START
a la position START.
La plume trace maintenant la courbe des oscillations amorties.
TRAVAIL A EFFECTUER :
1-Remplir le tableau ci-dessous :
tn(s)
A(tn) en cm
LnA(tn)
Tn(s) = tn+1- tn
n =2/T n
22
nn0 b

4
2-Tracer la fonction ln(A(t)) en fonction du temps .
N.B :Ln(A(tn))=ln(A0 ) - bt
Donc on pourra déduire le coefficient d’amortissement b, à partir du graphe par la méthode de la
tangente.
3-Calculer les valeurs moyennes de la pulsation propre 0n et la pseudo pulsationn.
4-Calculer la valeur du décrément logarithmique = bTmoy ainsi que le coefficient de qualité
b2
Q0
0 Étant la valeur moyenne des 0n ,Tmoy étant la valeur moyenne des Tn
5-Conclusion

5
0V
LC
1
dt
dV
L2
R
dt
Vd S
S
2S
2
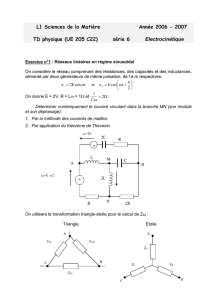
TP N° 2
CIRCUIT RLC ATTAQUE PAR UN SIGNAL CARRE
RAPPEL THEORIQUE :
-Soit un condensateur chargéinitialement tel qu’ à ces bornes on ait une tension:
C
q
VS
Ce condensateur se décharge à travers une résistance R et une bobine L. Nous appliquons la loi de
kirchhof Σ Vi=0, on obtient l’équation différentielle suivante :
B est le coefficient amortissement ,
C.L
1
0
est appelée pulsation propre du circuit .
(R0 est appellée résistance critique) ,pour la solution de l’équation 1, trois cas peuvent se
présenter :
1- R< R 0, on a un faible amortissement (oscillations possibles)
2- R= R0, amortissement critique (pas d’oscillations)
3- R> R0, on a un fort amortissement (oscillations impossibles) IL est demande à l’étudiant de
revoir la solution des équations différentielles.
REALISER LE MONTAGE SUIVANT :
-La manipulation comporte le matériel suivant :
-Un oscilloscope bi-courbe
-un générateur de tension dont on pourra fixer la fréquence et l’amplitude
-une plaque de manipulation.
-Une décade de résistance.
-une bobine d’inductance L (500 spires)
-un condensateur de capacité C (~20nF) .
R = 100
VOIE OSCILLO
FREQUENCE
METRE
L
V
e
t
(
)
V
s
t)
(
Generateur
C
L
2R0
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%